新型防撞系统航迹处理优选方法
- 国知局
- 2024-11-25 15:13:13
本发明涉及机载防撞系统,具体是新型防撞系统航迹处理优选方法,涉及空中交通飞行安全与防相撞。
背景技术:
1、空中交通警戒与防撞系统(tcas,traffic alert and collision avoidancesystem,国际民航组织),其等价术语为机载防撞系统(acas,airborne collisionavoidance system)由美国联邦航空局(faa)定义,主要用于防止航空器与航空器相撞。国际民航组织强制19座以上或最大起飞重量超过5700kg的涡轮动力商业运输航空器加装tcas ii型防撞系统。tcas不依赖于地面管制系统,可提供交通告警(ta)和决断告警(ra),主要用于为航空器提供空中飞行安全间距保证,系统采用二次雷达的工作方式探测附近空域的接近航空器,必要时,提醒飞行员采取规避措施以保持与其它航空器的安全间距,达到防碰撞的目的。多年的飞行实践证明,该系统是防止航空器空中相撞的最后屏障,能提供超出地面管制的飞行安全能力,对应付空中突发的危险接近和避免相撞有巨大作用。
2、机载防撞系统基于二次雷达原理对空域中装备了s模式应答机、c模式应答机的目标飞机进行监视跟踪形成航迹,进而通过防撞逻辑算法形成告警。 具体来说,系统的acas主机通过定向天线发起询问,附近空域配装有空管应答机(s模式/atcrbs应答机)的航空器(以下称为目标机)会做出应答,acas主机根据收到的应答信号,获得目标机的高度、相对距离、方位等信息,对其进行持续的监视跟踪,形成目标机航迹,防撞逻辑使用航迹信息并结合本机的位置和运动评估出目标机的威胁级别(ot:其它飞机,pt:接近飞机,ta:交通告警,ra:决断告警),给出有效的防撞机动飞行指示。因而,监视航迹是防撞告警的前提条件,是防撞告警的有效性和安全性的首要的前提条件。
3、随着广播式自动相关技术ads-b、转发式自动相关技术ads-r、马尔科夫智能决策技术的发展和应用,出现了混合监视防撞系统(tcas/acas with hybrid surveillance,以下简称h-acas) 和新一代防撞系统acas x,能够兼容更多的数据源进行空域监视与防撞告警,可以通过主动询问、被动侦听两种技术手段结合的方式对加装航空应答机、ads-b out功能的目标飞机进行监视,从而起到降低询问频次、减少空间电磁干扰、扩展监视距离,同时通过优化算法、数据滤波等一系列技术手段保持系统防撞安全性。
4、新的告警数据源的引入,提升了防撞系统的性能,同时也引入了新的问题,就是如何统筹使用、选择不同数据源的航迹用于驾驶舱显示以及防撞逻辑运算,以提供更精准的态势感知和更有效的防撞告警。
技术实现思路
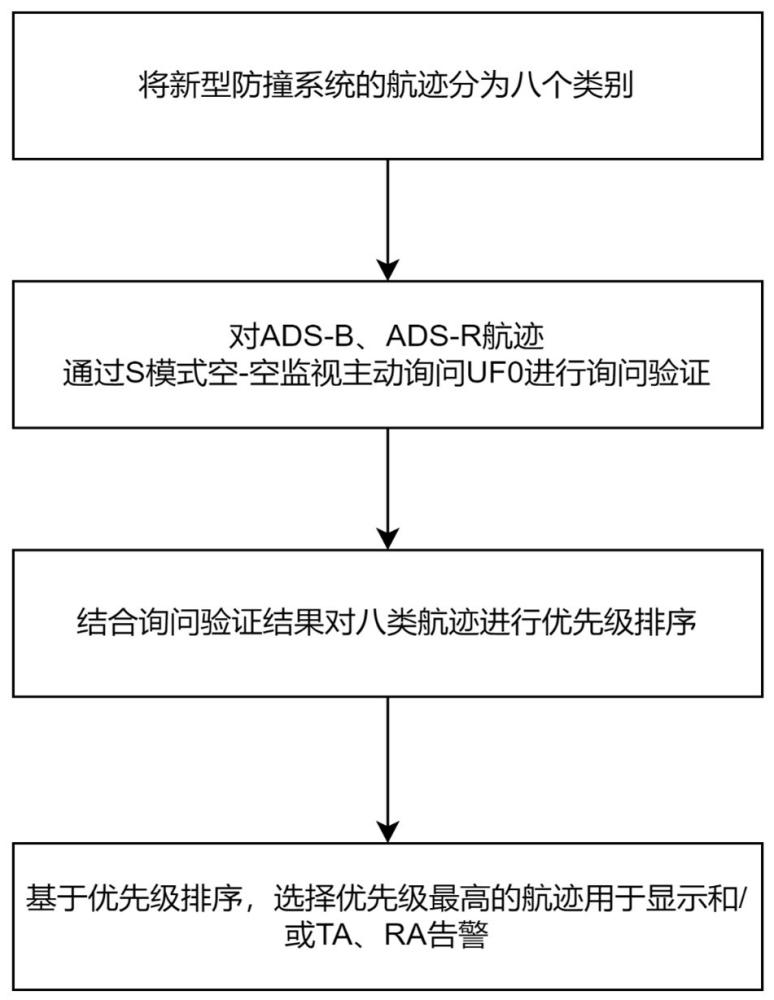
1、鉴于此,本发明公布了新型防撞系统航迹优选方法,能够有效解决机载防撞系统的航迹优选问题。该方法包括以下具体步骤:
2、s1:将新型防撞系统监视跟踪的航迹分为八类:c模式、标准s模式、简化s模式、扩展混合监视、高精度ads-b/ads-r、高精度ads-r、低精度ads-b、低精度ads-r;
3、s2:通过s模式主动询问对ads-b、ads-r航迹的真实性进行验证确认;
4、s3:按机载防撞系统的ta,ta/ra当前工作模式以及ads-b、ads-r航迹验证结果对八类航迹设置优先级;
5、s4:对每个目标机的航迹数据,选择当前工作模式下优先级最高的航迹,用于防撞逻辑运算。
6、八类航迹的具体定义,说明见表1。
7、表1 航迹定义说明
8、 序号 航迹类型 说明 1 c模式 通过仅c模式主动询问atcrbs应答机获得 2 标准s模式 通过仅s模式uf0主动询问s模式应答机获得,标称询问频率1hz 3 简化s模式 通过仅s模式uf0主动询问s模式应答机获得,标称询问频率5hz 4 扩展混合监视 对具备ads-b out功能的s模式应答机,采用ads-b in被动监视 + 低频率uf0主动询问获得 5 高精度ads-b 对特定精度要求的ads-b out报文被动监视获得 6 高精度ads-r 对特定精度要求的ads-r报文被动监视获得 7 低精度ads-b 对特定精度要求的ads-b out报文被动监视获得 8 低精度ads-r 对特定精度要求的ads-r报文被动监视获得
9、进一步的,高精度ads-b、高精度ads-r航迹、低精度ads-b航迹、低精度ads-r航迹的分类依据在于使用ads-b、ads-r广播数据信息:导航完整性类别字段nic≥6,位置导航精度类别字段nacp≥7(由位置估计不确定度定义epu的,7级,95%水平误差限epu<0.1nm),速度导航精度类别nacv=1,监视完整性等级sil=3(由rc超限概率定义,rc为直径取值epu的2倍,sil3级,概率≤10e-7/h),ads-b版本字段version=2。满足以上所有条件的ads-b、ads-r航迹数据为高精度航迹,否则为低精度航迹。
10、进一步的,航迹的优先级设置,按降序排列如下:
11、(1)c模式;
12、(2)高质量ads-b且验证通过;
13、(3)标准s模式或简化s模式(s模式或为标准模式或为简化模式);
14、(4)高质量ads-b或ads-r但验证失败(仅用于显示,不用于告警);
15、(5)混合监视航迹;高质量ads-r;
16、(6)低质量ads-b或低质量ads-r(仅维护航迹、不用于显示和告警);
17、依据上述优先级设置,具体进行航迹优选的步骤如下:
18、s1:判断目标机是否存在c模式航迹,如存在c模式航迹,则选定该航迹,且该航迹用于显示和ta、ra告警;如不存在,进入s2;
19、s2:判断目标机是否存在高精度ads-b航迹,如存在,则检查是否验证通过;如不存在或验证不通过则进入s3;
20、s3:判断该目标是否存在s模式航迹,如存在,则选定该航迹用于显示和ta、ra告警,如不存在,进入s4;
21、s4:判断该目标是否存在混合监视航迹,如存在,则选择该航迹用于显示,但不用于ta、ra告警,如不存在,进入s5;
22、s5:判断是否存在高质量ads-b 航迹,但验证失败,如存在则选择该航迹用于显示,但不用于ta、ra告警,如不存在,流程结束。
23、进一步的,对于高精度ads-b、高精度ads-r航迹、低精度ads-b航迹、低精度ads-r航迹,需要进行航迹真实性验证,航迹真实性验证的具体方法和步骤如下:
24、s1:通过s模式空-空监视询问uf0对每一个目标进行周期性探测询问,从而获取目标的距离、高度、方位角度信息;
25、s2: 将询问得到的距离、高度、方位信息与本监视周期相应的ads-b或ads-r被动监视航迹信息进行验证,满足以下全部条件为验证成功:
26、(1)s模式地址相同;
27、(2)距离误差≤100英尺+距离率绝对值 * 验证周期;
28、(3)高度误差≤150英尺;
29、(4)方位误差≤15°。
30、对于验证失败的目标,立即进行补充验证,仍然没有验证成功,则判:定为验证失败。
31、进一步的,对航迹真实性验证的验证周期动态调整的,并满足以下条件:
32、(1)验证周期 = 1s,当toa≤60;
33、(2)验证周期 = 5s, 当toa>60s。
34、其中toa为机载防撞系统的预测的目标机与本机在最接近点的时间。
35、最后,ads-b、ads-r航迹在其生命周期内,一旦验证失败则不会成为优选航迹,无论后续验证是否成功。
36、本发明的技术效果:基于本发明公开的方法,解决航迹优选问题,能够针对新型防撞系统所使用的多种传感器信息及其形成的目标航迹,按照航迹类型和验证结果实现最优航迹选择,从而为目标监视和防撞告警提供最有效的信息源,从而提高新型防撞系统的告警的准确性。
本文地址:https://www.jishuxx.com/zhuanli/20241125/336790.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表