一种分班组多任务组合的智慧场地倒运方法与流程
- 国知局
- 2024-11-25 15:17:33
本发明涉及智慧场地倒运,尤其涉及一种分班组多任务组合的智慧场地倒运方法。
背景技术:
1、随着各行各业的不断发展,特别是制造业、建筑业、服务业、运输业等领域,对高效、精准的派工管理需求日益增长。传统的派工方式往往存在效率低下、资源分配不均等问题,已逐渐无法满足现代企业的管理需求。伴随着人工智能、大数据、云计算等技术的快速发展,为智慧派工提供了强有力的技术支撑,这些高新技术使得派工管理走向自动化、智能化,系统将能够更准确地预测客户需求和服务资源情况,自动生成更加科学合理的派工方案以及更为高效、精准的派工管理服务。
2、在物流运输中,“重去轻回”是传统的运输模式,即货物从一地运往另一地后,返程车辆往往空载或装载较少货物,很大程度上造成了不必要的资源浪费并导致运输成本的增加。随着物流业的快速发展和智能化技术的广泛研究与应用,企业越来越注重降低物流成本、提高运输效率。因此,“重去重回”模式应运而生,即返程的车辆也尽可能满载货物,以优化资源利用,降低运输成本。
3、场地倒运作为工业生产流程中的关键环节,其现行作业模式依赖于现场工人的即时判断,通过倒运管理系统手动编排搬运计划并分配作业设备。然而,这种模式往往难以高效实现资源的最优配置与协同作业,无法实现降本增效的目标。为此,亟需引入智能化、自动化的优化策略,以形成统筹全局、协同高效的最佳搬倒方案,从而显著提升作业效率、增加成本效益。同时需要一种高度智能化的、数据驱动的优化算法,该算法能够精准地分析派工任务的需求与运输资源(如车辆、司机等)的实时状态,特别地,它能有效结合重去重回的运输模式,精准地匹配货物运输的起点与终点,最大化回程车辆的装载率,减少空驶率,从而显著提升运输效率,降低整个运输作业过程中的物流成本。
4、现有技术的实现方案:
5、(1)大多数的港口、工地仍然采用人工前往实地安排作业任务的模式,依据现场的实际情况来分配班组,制定具体的车辆数目和倒运计划。
6、(2)专利公开号为cn112052991a的发明专利,公开了一种带有岸桥缓冲区的自动化集装箱码头agv重进重出路径规划方法,在港口作业中提出了一种带有岸桥缓冲区的自动化集装箱码头agv重进重出路径规划方法,该方法增加了岸桥缓冲区,在此基础上构建了agv重进重出调度模型,以提供岸桥与堆场之间的双向集装箱运载,避免agv空载现象,进而提高码头运输环节的效率。
7、(3)专利公开号为cn114326623a的发明专利,公开了用于自动化码头岸桥下agv作业的调度方法,为解决当同一台agv在不同岸桥分别进行装船作业和卸船作业时,到装船岸桥的交互车道进行送箱作业,送箱作业完成后需要尽快驶离装船岸桥下作业区进入缓冲区,再从缓冲区出发到卸船岸桥或堆场进行收箱作业出现空载的问题。提供一种新的调度方法以对agv在岸桥下作业进行优化:agv重载进入装船岸桥下作业区实施卸载后,直接进入卸船岸桥下作业区实施装载后离开,实现不同岸桥下agv的重进重出,以此降低agv的空载率并提升其收箱效率。
8、现有技术的缺点:
9、人工制定搬倒计划,分配作业设备,效率低下。只能安排部分计划任务,很难实现统筹协同、降本增效的计划目标。人为指挥安排到的计划大多数都为单向的计划,即安排翻斗车从a点到达b点完成装载任务之后,该翻斗车会空载回到a点,导致翻斗车的利用效率低下并造成成本损失。
10、现有专利技术依然是完成一个任务后解决下一个任务,没有考虑计划之间的联合运输。这使得现有技术不能满足多任务情况下的需求。
11、现有专利技术虽然通过重去重回解决空载问题,但在整个规划过程中并没有按照最节约成本的目标导向进行重去重回运输模式。这可能导致陷入局部的最优,而无法达到全局的最优。
12、现有专利技术只是简单将所有任务一起分配,并没有考虑分班组作业的情况。这使得规划的结果无法在实际情况下应用,导致现有专利技术对现实条件的适应性较差。
技术实现思路
1、本发明的目的是为了解决上述技术问题,而提出的一种分班组多任务组合的智慧场地倒运方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种分班组多任务组合的智慧场地倒运方法,包括以下步骤:
4、s1,获取计划数据;
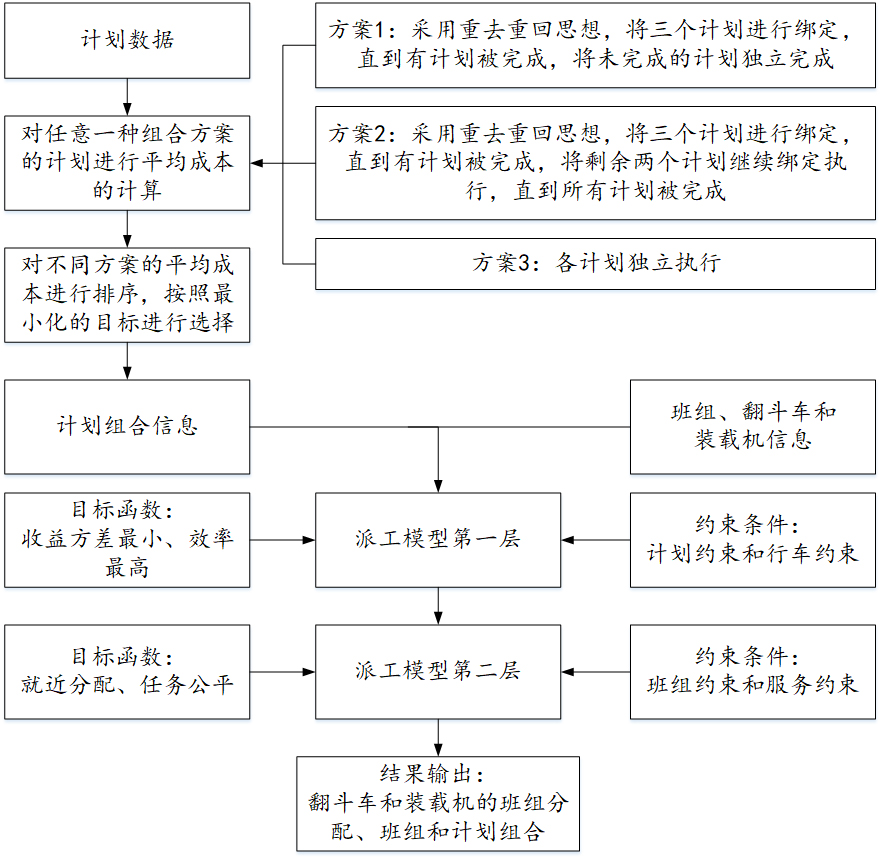
5、s2,根据获取的计划数据,对任意一种计划组合方案进行平均成本计算并采用“重去重回”思想,对不同方案的平均成本进行排序,选择最小成本的组合方式对计划进行绑定;
6、s3,计划组合信息,计划组合信息用于将绑定的计划数据与班组、翻车斗和装载机信息进行组合,并安排车辆执行“重去重回”的运输模式;
7、s4,通过派工模型依据作业要求和当前正在执行的计划、车辆情况对计划实现一键指派,建立混合整数规划模型并采用分支定界算法,得到相对应的最优派工方案。
8、优选地,所述计划数据包括倒运类型、货种、货物特性、起止位置、运输量、截止时间。
9、优选地,所述s2中的组合方案为:
10、方案1:采用重去重回思想,将三个计划进行绑定直到有计划被完成,将未完成的计划独立完成;
11、方案2:采用重去重回思想,将三个计划进行绑定直到有计划被完成,将剩余两个计划继续绑定执行,直到所有计划被完成;
12、方案3:采用重去重回思想,三个计划独立执行。
13、优选地,所述派工模型包括派工模型第一层,通过派工模型第一层,以计划收益最均匀、执行效率最高、尽可能多地分配装载机和翻斗车为优化目标,实现车辆与计划的“重去重回”的运输模式一键绑定。
14、优选地,所述派工模型还包括派工模型第二层,通过派工模型第二层,以装载机和翻斗车就近分配为优化目标,并按照任务公平原则,实现运输车辆精细化调度和管理。
15、优选地,所述获取计划数据还包括数据导入和预处理,所述数据导入和预处理使对输入的数据进行缺失值的检测与填充,异常值的识别与处理,以及重复值的消除。
16、优选地,所述派工模型第一层均设有约束条件以及目标函数,所述派工模型第一层的约束条件为计划约束和行车约束,所述派工模型第一层的目标函数用于计算收益方差最小以及效率最高。
17、优选地,所述派工模型第二层均设有约束条件以及目标函数,所述派工模型第二层的约束条件为班组约束和服务约束,所述派工模型第二层的目标函数用于车辆的就近分配以及任务公平。
18、本发明与现有技术相比,其有益效果为:
19、1、通过智慧派工系统和重去重回算法,以最低的平均路程成本和最大车辆利用率为目标,得到最优的分配任务。
20、2、重去重回算法以牺牲较小距离的代价换取空跑的距离,尽可能地按照方案要求将多个计划捆绑在一起。以三个计划为例,从a点完成任务到达b点之后选择前往c点完成从c→d点的任务,再从d点前往e点完成e→f的装载任务,最终回到a点以最大程度地利用车辆使用效率,在分配任务的同时会保证每辆车的平均使用率。
21、3、将多个计划进行组合后,使用3种不同的派工方案分别计算平均成本,并选取其平均成本最小的方案。通过对3种方案进行比较后得到的派工安排一定是会比没有进行重去重回或者只是简单将两个计划进行组合后重去重回的派工安排更优的。
22、4、班组分配模型将所有的作业计划在班组间进行分配,同时计算出每个计划需要的装载机和翻斗车数量。重去重回算法通过将多个计划协同计算,得到最优的任务组合,从而实现整个计划任务的最优配置。
23、综上所述,本发明使用重去重回算法对港口计划和班组的优化方法,包括但不限于重去重回运输模式的选择、计划之间的捆绑方式、平均路程成本统一的标准等;使用派工模型对港口装载机和翻斗车的具体实施方式,包括但不限于模型结构、计划和班组直接相匹配的标准、翻斗车和装载机相关的约束等。
本文地址:https://www.jishuxx.com/zhuanli/20241125/337149.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表