一种基于栅格编码的低空高密度监视目标冲突检测方法与流程
- 国知局
- 2024-11-25 15:17:24
本发明属于民用航空交通管理领域,具体涉及一种基于栅格编码的低空高密度监视目标冲突检测方法。
背景技术:
1、随着低空无人机技术的迅速发展,无人机在农业、物流、监测、娱乐等多个领域得到了广泛应用。然而,无人机的大量部署也带来了航迹冲突的问题,尤其是低空区域,空间密集,航路交错,无人机间的碰撞风险显著增加。因此,有效的无人机航迹冲突检测技术成为了保障飞行安全的关键。
2、现有技术中,无人机航迹冲突检测主要依赖于直接计算两架无人机之间的距离,以此判断二者是否处于潜在的冲突状态。具体而言,通过实时获取无人机的位置信息,计算无人机之间的相对距离,当相对距离小于预设的安全阈值时,判定为存在冲突。这种方法在理论上简洁明了,易于实现,但在实际应用中有很大的局限性,随着无人机数量的增加,两两无人机之间距离的计算量呈指数级增长,导致计算资源消耗巨大、计算时间过长,难以实现实时高效的冲突检测。因此有必要研究一种更高效的无人机冲突检测方法。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种基于栅格编码的低空高密度监视目标冲突检测方法,针对监视区域内所有的低空空域进行栅格建模,以垂直间隔和水平间隔划分空域栅格,再根据监视目标的实时位置,进行监视目标航迹冲突的决策判断,确保监视目标能够在监视区域内实现防碰撞。本发明优化了冲突检计算方法,可以同时处理高密度的监视目标数据,减少计算次数,降低计算时间,能够提升监视目标的安全运行水平。
2、为达到上述目的,本发明采用的技术方案如下:
3、本发明的一种基于栅格编码的低空高密度监视目标冲突检测方法,步骤如下:
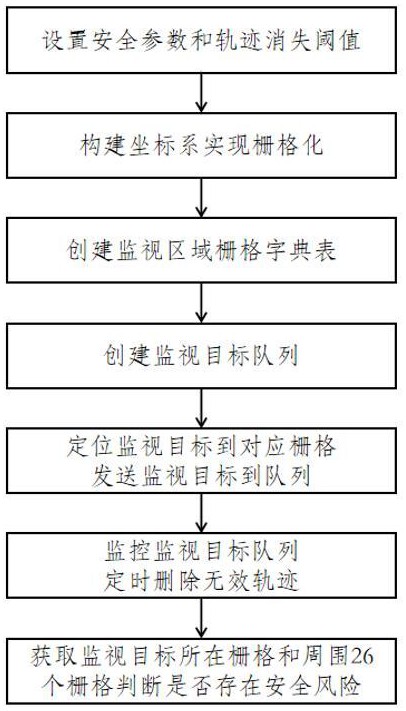
4、步骤s1:设置监视目标之间的水平安全距离、垂直安全距离和监视目标轨迹消失阈值;
5、步骤s2:选取监视区域内任一点为坐标系原点,依据垂直安全距离及水平安全距离构建三维空间坐标系,将整个监视区域进行栅格化处理;
6、步骤s3:创建监视区域栅格字典表,为每个经栅格化处理后的空间位置赋予唯一编号,并将其存储于监视区域栅格字典表中;
7、步骤s4:创建监视目标队列,依据获取到的监视目标轨迹时间戳对队列中的监视目标进行排序;
8、步骤s5:基于当前监视目标所处位置信息,计算并确定当前监视目标所在的栅格编号,通过栅格编号在监视区域栅格字典表中定位当前监视目标所在的栅格,将当前监视目标归入对应栅格内,在监视区域栅格字典表中新增或更新当前监视目标的位置信息,并记录当前监视目标的当前时间戳,将当前监视目标位置信息发送给监视目标队列;
9、步骤s6:对监视目标队列进行实时监控,定时获取并删除监视目标队列中超出监视目标消失阈值的监视目标位置信息,根据监视目标位置信息,删除监视区域栅格字典表中该监视目标信息;
10、步骤s7:通过栅格编号从监视区域栅格字典表中检索监视目标所在栅格及其周围26个相邻的栅格,判断当前监视目标所在栅格及其周围26个相邻的栅格内是否有其他监视目标,若有,则认为当前监视目标存在安全风险,进行冲突告警;若没有,则当前监视目标处于安全状态。
11、进一步地,所述步骤s1具体包括:
12、设置监视目标之间的水平安全距离h,用于界定监视目标在水平方向上与其他监视目标应保持的最小间隔;设置监视目标之间的垂直安全距离k,用于控制监视目标在垂直方向上的安全范围;设置监视目标轨迹消失阈值l,用于判断监视目标是否已脱离有效监视或轨迹已中断。
13、进一步地,所述步骤s2具体包括:
14、在监视区域b内任意选取一点作为坐标系原点o,标记为,以o点建立空间直角坐标系,以水平安全距离h作为空间坐标系x轴和y轴的步长,以垂直安全距离k作为空间直角坐标系z轴的步长,获得栅格化后的监视区域,如下:
15、;
16、其中,n表示顶点沿着x轴方向,以水平安全距离为步长,栅格化的总数;i表示顶点沿着y轴方向,以水平安全距离为步长,栅格化的总数;u表示顶点沿着z轴方向,以垂直安全距离为步长,栅格化的总数;b0表示高度为0的所有栅格,b1表示高度为1的所有栅格,bu表示高度为u的所有栅格;
17、在空间直角坐标系中,依据从左至右、从下至上的编号区域的编号坐标b(q,w,e);其中,q表示空间三维坐标中x轴方向栅格的序号,w表示空间三维坐标中y轴方向栅格的序号;e表示空间三维坐标中z轴方向栅格的序号;完成监视区域栅格的划分及编号,获得多个监视区域栅格。
18、进一步地,所述步骤s3具体包括:
19、创建监视区域栅格字典表p,该监视区域栅格字典表p的键为监视区域栅格的编号,值为该监视区域栅格内所包含的所有监视目标集合;监视区域栅格坐标为b(q,w,e),分配编号qwe,并将其映射为字典表p中的p(qwe);每个监视目标集合表示为一个集合,其中包含多个监视目标的位置信息,每个监视目标包括以下属性:经度lon、维度lat、高度height、监视目标唯一识别号id;
20、以监视区域唯一编号判断需要查询的监视区域栅格是否在监视区域栅格字典表中,若在,则返回或更新该栅格的相关信息;若不在,则在监视区域栅格字典表新增该栅格条目,并初始化一个空的监视区域栅格。
21、进一步地,所述步骤s4具体包括:
22、创建一个监视目标队列s,该监视目标队列以监视目标唯一识别号id作为键,以监视目标的当前位置数据作为值;当监视目标队列接收到新的监视目标位置数据时,依据获取的数据的时间戳对队列进行重新排序,以确保队列中最小的时间戳排在队列头部。
23、进一步地,所述步骤s5具体包括:
24、从监视系统的传感器或数据源中获取当前监视目标的位置信息,使用设置的水平安全间隔和垂直安全间隔作为栅格划分的标准,通过监视目标的经纬度坐标与监视区域起点坐标的差值除以水平安全间隔,得到监视目标在水平方向上的栅格索引;通过监视目标的高度与监视区域起点高度的差值除以垂直安全间隔,得到监视目标在垂直方向上的栅格索引;结合水平和垂直方向上的栅格索引,计算出监视目标所在的三维栅格编号;
25、根据上述得到的三维栅格编号,在监视区域栅格字典表中,查找到对应的栅格,将监视区域栅格字典表中当前监视目标的位置信息进行更新,如果当前监视目标未存储在在监视区域栅格字典表中,则创建一个新的记录;
26、将当前监视目标的当前时间戳作为时间戳,根据监视目标唯一识别号id,将当前监视目标的位置数据和时间戳发送到监视目标队列s中。
27、进一步地,所述步骤s6具体包括:
28、实时监控监视目标队列s,当获取到队列头部的监视目标时间戳超出监视目标轨迹消失阈值时,则认为该监视目标已失去有效追踪或轨迹已中断,从队列中获取并删除该监视目标位置信息,并根据获取到的位置信息从监视区域栅格字典表中删除该监视目标的位置信息。
29、进一步地,所述步骤s7具体包括:
30、通过监视目标的位置信息,得到当前监视目标所在栅格的编号qwe从监视区域栅格字典表中获取监视目标所在栅格,并通过当前栅格编号qwe获取监视目标周围相邻栅格集r,具体过程如下:
31、;
32、通过栅格集r获得监视目标周围监视区域内所有监视目标;
33、若计算出当前监视目标所在监区域栅格及其相邻的26个监视区域栅格内无其他监视目标,则当前监视目标处于安全状态;
34、若计算出当前监视目标所在监区域栅格及其相邻的26个监视区域栅格内有其他监视目标,则当前监视目标存在安全风险,进行冲突告警。
35、本发明的有益效果:
36、本发明将监视区域全部栅格化达到监视区域数字化,可以同时监视大量高密度的监视目标,省略了监视对象点与点之间的计算过程,直接以空间视图的形式对监视对象进行冲突检测,避免了大量的计算和判断过程,提高了运算效率;此外,本发明通过引入监视区域字典表,进一步加快了搜索速度并节省了内存资源;本发明通过监视区域队列的应用,可以动态删除无效的航迹点,确保了监视数据的准确性和实时性。
本文地址:https://www.jishuxx.com/zhuanli/20241125/337137.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表