一种仿生蜘蛛机器人
- 国知局
- 2024-11-25 15:43:12
本技术涉及仿生机械领域,具体而言,涉及一种仿生蜘蛛机器人。
背景技术:
1、目前,人们根据仿生机械的功能特征及应用领域,将其分为几大类,包括仿生承力机械、仿生抓取机械以及仿生移动机械。其中仿生承力机械主要是指借鉴生物体静态承力结构原理,进行仿生设计而研制成功的各种机械装置,从而达到节省原材料、增加整体或局部强度、提高稳定性等目的,例如针对马蹄的结构特点,进行仿生设计而研制成功的抗冲击承力装置等;仿生抓取机械通常是指模仿生物抓取功能及其结构特点,进行仿生设计的各种抓取装置,主要包括在工业、医疗、科研、军事等领域得到广泛应用的各种各样机械手;仿生移动机械则是指模仿生物体运动的力学原理和结构特点,进行仿生设计的各种行走或移动装置,主要包括足式移动、轮式移动、蠕动式移动、履带式移动等形式的仿生机械装置。
2、在诸如废墟、野外或人员难以进入和无法正常作业的环境中,机器人可以实施清除障碍、抢救受困人员以及携带特定装备进行维修、探测等。如今,仿生多足仿生机器人越来越多地应用于实地勘测、救援等领域,具备很高的应用价值及研究意义。但是对复杂地形的探索时,现有的仿生机器人在保持稳定上比较困难。在崎岖复杂的环境下,容易失去重心翻滚,从而无法完成指定的任务目标。
3、八足仿生机器人主要应对非结构化环境下复杂的地形状况,其主要任务是实现机器人在诸如废墟、野外或人员难以进入和无法正常作业的环境中实施清除障碍、抢救受困人员以及携带特定装备进行维修、探测等。现有的多足机器人大多为四足,在运动稳定性方面表现较差,且步序一般采用对角行进步序,使得行进过程中重心在不断变化,造成机体不稳定。现有的四足机器人,以波士顿动力公司的机器狗为例,为了高度的四肢灵活性将四肢加长,提高了重心,牺牲了部分稳定性,因此在遇到崎岖不平的路面时容易磕碰侧翻。
4、公开号为cn116750105a的专利,公开了一种八足仿生蜘蛛机器人,其使用丝杠机构带动正弦机构运动实现蛛腿的水平摆动,减小了机身体积,减小了机构的复杂度,降低了机身自由度,减轻了控制的难度。但是一只蛛腿便需要一个丝杠机构用于驱动,驱动机构数量较多,制造成本高,重量和体积也会有所增加,影响运动灵活度。
技术实现思路
1、本实用新型的目的在于提供一种仿生蜘蛛机器人,解决现有技术的仿生蜘蛛机器人,驱动机构数量较多,制造成本高,重量和体积也会有所增加,影响运动灵活度的问题。
2、本实用新型的实施例通过以下技术方案实现:
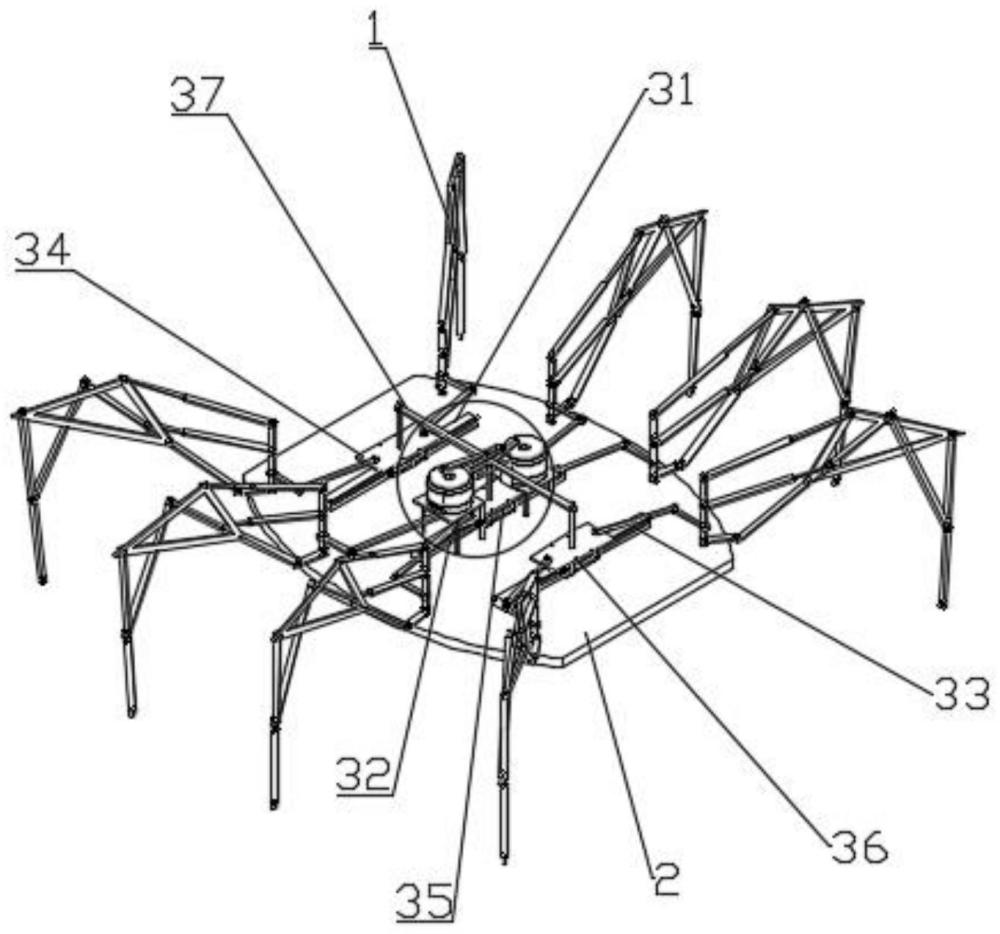
3、一种仿生蜘蛛机器人,包括八个腿足部件、躯干部件和驱动装置,所述躯干部件通过所述驱动装置与所述腿足部件连接,所述驱动装置包括:滑轨,所述躯干部件设有三组相互平行的滑轨,所述滑轨沿所述躯干部件的宽度方向延伸,三个所述滑轨分别为前滑轨、中部滑轨和后滑轨;第一滑块,所述前滑轨上配置所述第一滑块,所述第一滑块的两端各与一个所述腿部转动连接;第二滑块,所述中部滑轨上配置所述第二滑块,所述第二滑块的两端各与两个所述腿部转动连接;第三滑块,所述后滑轨上配置所述第三滑块,所述第三滑块的两端各与一个所述腿部转动连接;连杆,所述第一滑块通过所述连杆连接所述第三滑块;第一驱动组件,所述第一驱动组件与所述连杆连接,用以驱动所述连杆沿所述躯干部件的宽度方向往复运动;第二驱动组件,所述第二驱动组件与所述第二滑块连接,用以驱动所述第二滑块沿中部滑轨往复运动。
4、优选的,所述第一驱动组件包括:第一旋转电机;第一转盘,所述第一旋转电机与所述第一转盘连接;第一连接杆,所述第一连接杆的一端与所述第一转盘转动连接且偏心连接,所述第一连接杆的另一端与所述连杆连接。
5、优选的,所述第一驱动组件还包括:第一限位片,所述第一限位片设有沿所述躯干部件宽度方向延伸的条形孔一;第一滑轴,所述第一滑轴的底端穿过所述条形孔一与所述连杆连接,所述第一滑轴的顶端与所述第一连接杆转动连接。
6、优选的,所述第二驱动组件包括:第二旋转电机;第二转盘,所述第二旋转电机与所述第二转盘连接;第二连接杆,所述第二连接杆的一端与所述第二转盘转动连接且偏心连接,所述第二连接杆的另一端与第二滑块连接。
7、优选的,所述第二驱动组件还包括:第二限位片,所述第二限位片设有沿所述躯干部件宽度方向延伸的条形孔二;第二滑轴,所述第二滑轴的底端穿过所述条形孔二与所述第二滑块连接,所述第二滑轴的顶端与所述第二连接杆转动连接。
8、优选的,所述腿足部件包括:连接部,所述连接部的一端与所述驱动装置连接;转轴,所述转轴的底端与所述躯干部件转动连接,所述连接部与所述转轴固定连接;电动推杆一和电动推杆二,所述转轴从下至上顺次与所述电动推杆一和电动推杆二转动连接;三角板,所述电动推杆二的输出端与所述三角板的第一角转动连接;中杆,所述中杆的一端与所述三角板的第二角转动连接,所述中杆的另一端与所述三角板的第二边转动连接,所述第二边与所述第二角相对,所述电动推杆一与所述中杆转动连接;足杆,所述足杆的顶端与所述三角板的第三角转动连接;斜杆,所述斜杆的一端与所述中杆远离第二角的一端转动连接,所述斜杆的另一端与所述足杆转动连接。
9、优选的,所述足腿部件还包括:限位杆一,所述限位杆一的一端与所述转轴转动连接;限位杆二,所述限位杆二的一端与所述限位杆一的另一端转动连接,所述限位杆二的另一端与所述三角板的第二角转动连接。
10、优选的,所述连接部包括:转动杆,所述转动杆的一端与所述驱动装置转动连接;驱动杆,所述转动杆的另一端与所述驱动杆的一端转动连接,所述驱动杆的另一端与所述转轴固定连接。
11、本实用新型至少具有以下有益效果:
12、本实用新型通过两个驱动组件配合滑块和连杆,实现了八条腿的协同运作和四足步态规划,在满足四足步态规划的前提下,驱动组件数量大幅减少,制造成本较低,机器人的重量和体积也进一步降低,提高机器人的运动灵活度。
技术特征:1.一种仿生蜘蛛机器人,包括八个腿足部件、躯干部件和驱动装置,所述躯干部件通过所述驱动装置与所述腿足部件连接,其特征在于,所述驱动装置包括:
2.根据权利要求1所述的仿生蜘蛛机器人,其特征在于,所述第一驱动组件包括:
3.根据权利要求2所述的仿生蜘蛛机器人,其特征在于,所述第一驱动组件还包括:
4.根据权利要求1所述的仿生蜘蛛机器人,其特征在于,所述第二驱动组件包括:
5.根据权利要求4所述的仿生蜘蛛机器人,其特征在于,所述第二驱动组件还包括:
6.根据权利要求1-5任一项所述的仿生蜘蛛机器人,其特征在于,所述腿足部件包括:
7.根据权利要求6所述的仿生蜘蛛机器人,其特征在于,所述腿足部件还包括:
8.根据权利要求6所述的仿生蜘蛛机器人,其特征在于,所述连接部包括:
技术总结本技术涉及仿生机械领域,用以解决现有技术的仿生蜘蛛机器人,驱动机构数量较多,制造成本高,重量和体积也会有所增加,影响运动灵活度的问题,提供了一种仿生蜘蛛机器人,包括八个腿足部件、躯干部件和驱动装置,所述躯干部件通过所述驱动装置与所述腿足部件连接,所述驱动装置包括:滑轨,所述躯干部件设有三组相互平行的滑轨,所述第一滑块通过所述连杆连接所述第三滑块;第一驱动组件与所述连杆连接;第二驱动组件,所述第二滑块连接。本技术通过两个驱动组件配合滑块和连杆,实现了八条腿的协同运作和四足步态规划,驱动组件数量大幅减少,制造成本较低,机器人的重量和体积也进一步降低,提高机器人的运动灵活度。技术研发人员:王善赋,李泽雅,余佳颖,何璐晨,游桂源,唐凌宵,邓宏展受保护的技术使用者:北京林业大学技术研发日:20240125技术公布日:2024/11/21本文地址:https://www.jishuxx.com/zhuanli/20241125/338647.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表