一种星表撞击坑检测识别方法及系统
- 国知局
- 2024-12-06 12:09:01
本发明属于遥感影像处理,尤其涉及一种星表撞击坑检测识别方法及系统。
背景技术:
1、撞击坑是行星表面最重要的地质特征之一,通过对撞击坑的研究,可以获取有关行星资源、地质年代和演化历史的重要信息。
2、月球与火星等星球表面小型撞击坑发生的频率远高于大中型撞击坑,其分布广泛、数量众多,能够提供更为丰富的撞击信息,是研究月球及其他行星表面过程和资源分布的重要对象。通过对月球小型撞击坑的识别和空间分布特征分析,可揭示撞击通量、形貌特性、撞击坑年龄及退化进程。并且,随着高精度月球影像数据的不断丰富,充分识别月球小型撞击坑与分析其空间分布特点,已经成为月球地质演化研究的迫切需要与根本保障。
3、传统的撞击坑检测方法多集中于大规模撞击坑的识别,在识别月球与火星表面的小型撞击坑时性能较差。针对小尺度撞击坑的识别方法,现有技术中也有一些设计,但现有小尺度撞击坑的方法仍存在以下几点问题:
4、(1)现有的依赖于纯数字正射影像的方法,容易受到光照角度和地形变化的影响。例如,光照角度未知且缺少参照物的情况下,难以通过影像数据直接区分正、负地形。由此训练而得的深度学习模型依赖于训练数据的光照方向,普适性较低;
5、(2)现有的采用融合数据的方法,通常融合数字正射影像、数字高程数据等。然而数字高程数据的分辨率较低,往往不能满足数十米乃至数米的撞击坑自动检测任务;
6、(3)现有的模型评价方法通常仅采用准确率(p)、召回率(r)、f1分数、map等数据作为模型是否预测正确的指标,这些指标均基于正确预测的占比设定,而缺少对正确预测框的大小、形状和位置误差的表征,无法进一步表征正确预测结果的准确情况。
7、因此,目前亟需开发一种针对小尺度撞击坑的检测方法,以解决现有的检测方法对星表小尺寸撞击坑检测的准确性和鲁棒性不足的问题。
技术实现思路
1、本发明的目的在于解决上述技术问题,提供一种星表撞击坑检测识别方法及系统,通过多种特征提取方法和图像增强融合技术,实现了月球、火星等行星表面的小尺度撞击坑的高效自动检测。
2、为实现上述目的,本发明采用的技术方案是:
3、一种星表撞击坑检测识别方法,其特征在于,包括以下步骤:
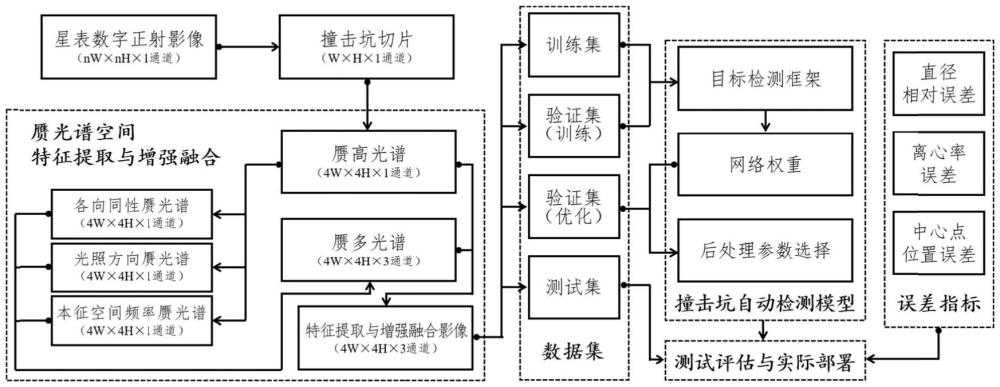
4、s1:获取星球表面撞击坑的影像数据,将其分割为预定尺寸的图像块,对每个图像块进行上采样以获得预定尺寸的赝高光谱图像;
5、s2:基于赝高光谱图像制作多种赝光谱图,制作多种赝光谱图的具体方法为:提取目标撞击坑的多种特征数据,分别作为多种不同的赝光谱图;其中,多种特征数据至少包括各向同性特征、光线入射方向特征和本征频率特征;多种不同的赝光谱图至少包括各向同性赝光谱、光线入射方向赝光谱和本征特征频率赝光谱;
6、s3:将多种赝光谱图进行融合,生成赝多光谱图像,将赝多光谱图像与赝高光谱图像进行增强融合,获得撞击坑的增强融合(psef)图像;
7、s4:构建基于深度学习的目标检测模型,使用psef图像对撞击坑检测模型进行数据训练,调整模型参数,以获得训练后的撞击坑检测模型;
8、s5:将待检测的星表撞击坑影像数据制作为psef图像后输入训练后的撞击坑检测模型,获得模型检测结果。
9、本发明一些实施例中,进一步包括以下步骤:
10、s6:建立判断模型检测结果准确率的误差分析指标,误差指标至少包括直径相对误差δd、离心率偏差δe和中心点位置偏差δl;
11、直径相对误差δd的计算公式为:
12、
13、其中,d、w、h分别为边界框的直径、宽度、高度。下标tpi为第i个正确预测边界框,下标gti为与tpi对应的人工标注真值框;
14、离心率偏差δe的计算公式为:
15、
16、其中,e为将边界框视为椭圆的离心率。b为该椭圆的半短轴长度,a为半长轴长度;
17、中心点位置偏差δl的计算公式为:
18、
19、其中,x0、y0分别为中心点的横纵坐标;
20、获得模型检测结果后,基于人工标注的真值框和检测结果中正确预测的边界框分别计算直径相对误差、离心率偏差和中心点位置偏差,从而在统计学角度评判模型预测框的准确性,即撞击坑自动识别算法的边缘检测精度。
21、本发明一些实施例中,进一步包括以下步骤:
22、基于获得的撞击坑psef图像制作优化验证数据集;
23、将优化验证数据集的数据输入训练后的撞击坑检测模型,采用离散穷举搜索方法在优化验证数据集中进行后处理参数寻优,以确定该撞击坑检测模型的最优后处理参数。
24、本发明一些实施例中,后处理参数包括nms置信度阈值和nms iou阈值;
25、进行后处理参数寻优的具体方法为:
26、分别设置两个后处理参数的取值范围;
27、在两个后处理参数的取值范围内以各自的预定步长穷举所有的后处理参数组合;
28、分别将各组参数组合赋值给训练后的撞击坑检测模型,并使用训练后的撞击坑检测模型对优化验证数据集中的图像进行检测;
29、基于各组参数组合的检测结果,以f1分数为依据选取最优的后处理参数组合,将其作为训练后的撞击坑检测模型的后处理参数。
30、本发明一些实施例中,步骤s2具体包括以下步骤:
31、使用高斯拉普拉斯滤波器提取各向同性赝光谱;
32、使用sobel算子提取光线入射方向赝光谱;
33、使用空间频率域带通滤波器提取本征空间频率赝光谱。
34、本发明一些实施例中,使用空间频率域带通滤波器提取本征空间频率赝光谱的具体方法为:
35、通过傅里叶变换将图像转换到空间频率域,获得空间频率域图;
36、使用预定形状仅包含目标尺度撞击坑本征频率的带通掩膜处理空间频率域图,以过滤无关频率信息;
37、将带通掩膜处理后的空间频率域图逆变换至空间域,获得图像中预定尺度撞击坑本征空间频率特征。
38、本发明一些实施例中,赝多光谱图像包括三个颜色通道,其每个通道分别代表一种特征,以保留各特征之间的差异性和互补性。
39、本发明一些实施例中,步骤s3中将赝多光谱图像与赝高光谱图像进行增强融合的具体方法为:
40、将赝多光谱图像转换至色相-饱和度-强度(hsi)空间,替换强度通道为赝高光谱图像的灰度图像后,转换回rgb空间以生成增强融合(psef)图像。
41、本发明一些实施例中,步骤s3中获得撞击坑的psef图像后,还包括以下步骤;
42、对获得的psef图像进行人工标注,并将其划分为彼此独立的训练数据集,训练验证数据集和测试数据集,分别用于对撞击坑检测模型进行训练、验证和测试。
43、本发明一些实施例进一步提供一种星表撞击坑检测识别系统,包括:
44、至少一个处理器;
45、至少一个存储器,用于存储至少一个程序;
46、当至少一个程序被至少一个处理器执行,使得至少一个处理器实现星表撞击坑检测识别方法。
47、本发明的有益效果在于:
48、1、本发明采用赝光谱空间特征提取和增强融合技术,实现了从多方面提取复杂地形和光照条件下的星表撞击坑的多模态特征,对提取的多模态特征进行增强融合生成的psef图像,包含丰富的细节信息,能够更好地适应深度学习的目标检测模型的训练过程,提高了模型的正确预测能力、边缘检测精度,以及模型对小尺度星表撞击坑检测结果的准确性和鲁棒性;
49、2、本发明通过建立误差指标,引入三个正确预测边界框误差分析指标,从而实现了从统计学角度分析撞击坑检测模型的识别准确度,弥补了准确率、召回率等惯用指标只能反映正确预测的占比,而无法表征正确预测框的大小、形状、位置具体准确与否的问题;
50、3、本发明在模型训练完成后进行后处理参数寻优,可以确定表现较好的后处理参数范围,从而为模型的实际部署提供指导,使模型在测试阶段及实际部署时发挥更好的效能。
本文地址:https://www.jishuxx.com/zhuanli/20241204/339614.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表