基于主动变形减阻的水中航行体用柔性表皮及其设计方法与流程
- 国知局
- 2024-12-06 12:11:08
本申请涉及制造,尤其是一种基于主动变形减阻的水中航行体用柔性表皮及其设计方法。
背景技术:
1、快速性是水面船舶及水下航行体重要的航行性能之一。水下航行体的阻力主要包括摩擦阻力和形状阻力,而摩擦阻力占总阻力的60%-80%。水面船舶的船体阻力主要包括摩擦阻力、兴波阻力和粘压阻力,其中摩擦阻力占比最大。无论是水面船舶还是水下航行体,影响其快速性的最主要因素均为摩擦阻力。减小摩擦阻力对于航行速度的提高、节能减排具有重大意义。
2、传统降低航行体阻力的方法主要是通过线型优化以降低兴波阻力与粘压阻力,经过多年的发展,通过这类方法进一步降低航行体阻力的空间已经很小。因此,需要采取新的方法来实现减小航行体阻力的目的。
技术实现思路
1、本申请针对上述问题及技术需求,提出了一种基于主动变形减阻的水中航行体用柔性表皮及其设计方法,本申请的技术方案如下:
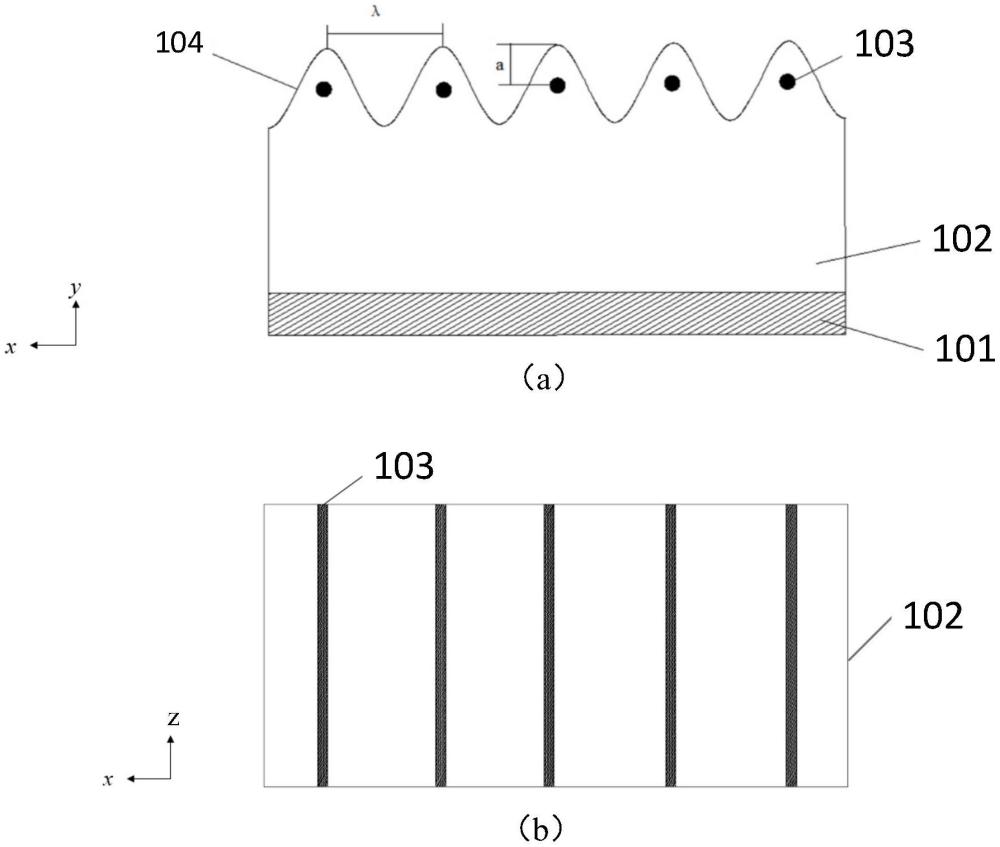
2、一种基于主动变形减阻的水中航行体用柔性表皮,柔性表皮贴覆在水中航行体与水接触的外表面,柔性表皮包括沿着垂直于水中航行体外表面向外的方向依次层叠在一起的磁性基底层和柔性绝缘物质层,柔性绝缘物质层内部设有多根相互平行的感应纤丝,感应纤丝的长度方向沿着水中航行体的周向;
3、磁性基底层在水中航行体航行过程中通有交变电流并产生方向变化的磁力,以对各根感应纤丝交替产生吸引作用和排斥作用,各根感应纤丝在磁力作用下带动柔性绝缘物质层外表面进行波动变形。
4、其进一步的技术方案为,柔性表皮贴覆在水中航行体上的表面摩擦系数达到预定阈值的位置处。
5、其进一步的技术方案为,确定柔性表皮在水中航行体上的贴覆位置的方法包括:采用动量积分方法对水中航行体进行边界层特征计算得到水中航行体沿着长度方向的表面摩擦系数的变化曲线,确定柔性表皮的贴覆位置是水中航行体上的表面摩擦系数达到预定阈值的对称位置。
6、其进一步的技术方案为,柔性表皮贴覆在水中航行体的艏部5%~15%航行体长度的位置。
7、其进一步的技术方案为,各根感应纤丝规格相同且等距离平行设置,各根感应纤丝与柔性绝缘物质层外表面的垂直距离相等,各根感应纤丝与磁性基底层的垂直距离相等;各根感应纤丝在磁力作用下带动柔性绝缘物质层外表面波动变形在垂直于水中航行体外表面的剖面形成ξ=acos(kx-ωt)形式的表面变形波,a是波幅与感应纤丝的运动幅度一致,k是波数且与相邻感应纤丝的距离相关,ω是角频率且与交变电流的电流方向变化频率相关,x是表面变形波前进方向的坐标,t是时间。
8、其进一步的技术方案为,交变电流的电流方向变化频率为800hz~1000hz,相邻两根感应纤丝之间的距离为800um~1000um,各根感应纤丝的运动幅度为40um~60um。
9、一种基于主动变形减阻的水中航行体用柔性表皮的设计方法,包括:
10、确定柔性表皮的设计结构,柔性表皮包括沿着垂直于水中航行体外表面向外的方向依次层叠在一起的磁性基底层和柔性绝缘物质层,柔性绝缘物质层内部在外表面处设有多根相互平行的感应纤丝;
11、基于柔性表皮的设计结构进行粘流数值模拟,确定达到减阻目标时柔性绝缘物质层外表面的波动变形的目标波形参数;
12、根据柔性绝缘物质层外表面的波动变形的目标波形参数确定柔性表皮的设计参数,设计得到柔性表皮。
13、其进一步的技术方案为,柔性绝缘物质层外表面的波动变形的目标波形参数为形成纵向剖面为ξ=acos(kx-ωt)形式的表面变形波;根据柔性绝缘物质层外表面的波动变形的目标波形参数确定柔性表皮的设计参数包括:
14、根据目标波形参数ξ=acos(kx-ωt)的波数k确定任意两根相邻平行布设的感应纤丝之间的距离,根据角频率ω确定磁性基底层中通入的交变电流的电流方向变化频率,根据波幅a确定每根感应纤丝的运动幅度,根据感应纤丝的运动幅度确定感应纤丝与柔性绝缘物质层外表面的距离、感应纤丝与磁性基底层的距离、柔性绝缘物质层的制作材料、交变电流的电流大小、感应纤丝的直径。
15、其进一步的技术方案为,确定达到减阻目标时柔性绝缘物质层外表面的波动变形的目标波形参数包括:基于柔性表皮的设计结构建立有限元模型并进行粘流数值模拟,确定使得柔性绝缘物质层外表面的壁面剪应力和近壁区速度矢量达到设计要求的波动变形的波形参数,作为达到减阻目标时的目标波形参数。
16、其进一步的技术方案为,确定达到减阻目标时柔性绝缘物质层外表面的波动变形的目标波形参数包括:基于柔性表皮的设计结构在预定流速范围内分别进行粘流数值模拟,确定在预定流速范围内均达到减阻目标时的目标波形参数。
17、本申请的有益技术效果是:
18、本申请提出的一种基于主动变形减阻的水中航行体用柔性表皮,通过在磁性基底层中通交变电流产生变化的磁力,控制感应纤丝带动柔性绝缘物质层外表面进行波动变换,改变边界层内的水流流动,能够显著减小水中航行体在水中航行的摩擦阻力。
19、通过对柔性表皮进行粘流数值模拟方法,确定达到减阻目标时柔性绝缘物质层外表面波动变形的目标波形参数,进而设计得到柔性表皮。分析了柔性表皮有效减阻的机理,使得设计的柔性表皮更加科学、有效。
技术特征:1.一种基于主动变形减阻的水中航行体用柔性表皮,其特征在于,所述柔性表皮贴覆在水中航行体与水接触的外表面,所述柔性表皮包括沿着垂直于水中航行体外表面向外的方向依次层叠在一起的磁性基底层和柔性绝缘物质层,所述柔性绝缘物质层内部设有多根相互平行的感应纤丝,所述感应纤丝的长度方向沿着水中航行体的周向;
2.根据权利要求1所述的水中航行体用柔性表皮,其特征在于,所述柔性表皮贴覆在所述水中航行体上的表面摩擦系数达到预定阈值的位置处。
3.根据权利要求2所述的水中航行体用柔性表皮,其特征在于,确定所述柔性表皮在所述水中航行体上的贴覆位置的方法包括:
4.根据权利要求2所述的水中航行体用柔性表皮,其特征在于,所述柔性表皮贴覆在水中航行体的艏部5%~15%航行体长度的位置。
5.根据权利要求1所述的水中航行体用柔性表皮,其特征在于,各根感应纤丝规格相同且等距离平行设置,各根感应纤丝与所述柔性绝缘物质层外表面的垂直距离相等,各根感应纤丝与所述磁性基底层的垂直距离相等;各根感应纤丝在磁力作用下带动柔性绝缘物质层外表面波动变形在垂直于水中航行体外表面的剖面形成ξ=acos(kx-ωt)形式的表面变形波,a是波幅与感应纤丝的运动幅度一致,k是波数且与相邻感应纤丝的距离相关,ω是角频率且与交变电流的电流方向变化频率相关,x是所述表面变形波前进方向的坐标,t是时间。
6.根据权利要求5所述的水中航行体用柔性表皮,其特征在于,所述交变电流的电流方向变化频率为800hz~1000hz,相邻两根感应纤丝之间的距离为800um~1000um,各根感应纤丝的运动幅度为40um~60um。
7.一种基于主动变形减阻的水中航行体用柔性表皮的设计方法,其特征在于,所述设计方法包括:
8.根据权利要求7所述的设计方法,其特征在于,所述柔性绝缘物质层外表面的波动变形的目标波形参数为形成纵向剖面为ξ=acos(kx-ωt)形式的表面变形波;根据所述柔性绝缘物质层外表面的波动变形的目标波形参数确定所述柔性表皮的设计参数包括:
9.根据权利要求7所述的设计方法,其特征在于,确定达到减阻目标时所述柔性绝缘物质层外表面的波动变形的目标波形参数包括:
10.根据权利要求7所述的设计方法,其特征在于,确定达到减阻目标时所述柔性绝缘物质层外表面的波动变形的目标波形参数包括:
技术总结本申请公开了一种基于主动变形减阻的水中航行体用柔性表皮及其设计方法,涉及制造技术领域,该方法包括:提供一种基于主动变形减阻的水中航行体用柔性表皮,所述柔性表皮贴覆在水中航行体的外表面。柔性表皮包括依次层叠在一起的磁性基底层和柔性绝缘物质层。柔性绝缘物质层内部设有多根平行的感应纤丝,感应纤丝的长度方向沿着水中航行体的周向。磁性基底层通有交变电流并产生方向变化的磁力,感应纤丝在磁力作用下带动柔性绝缘物质层外表面进行波动变形。提供了一种水中航行体用柔性表皮的设计方法,通过粘流数值模拟确定柔性表皮的设计参数。利用柔性绝缘物质层外表面的波动变形,有效减小水中航行体的摩擦阻力。技术研发人员:黄苗苗,张楠,邱耿耀,鲁江,张华,朱爱军,姚惠之受保护的技术使用者:中国船舶科学研究中心技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/339837.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表