一种芯片键合拉力与剪切力的自动化测试装置及方法与流程
- 国知局
- 2024-12-06 12:20:00
本申请属于微电子可靠性试验与失效,更具体地,涉及一种芯片键合拉力与剪切力的自动化测试装置及方法。
背景技术:
1、芯片键合拉力与剪切力测试是验证芯片键合与剪切强度的必要手段,芯片键合强度是指元器件内部封装键合点处内引线与芯片及封装体之间的键合强度,而芯片剪切强度是指芯片与管壳或基片粘接结合的强度。通过芯片键合拉力与剪切力测试,得到对应测试数据,与相应标准对比,即可验证芯片键合强度与剪切强度是否达标,芯片的键合与剪切强度是衡量半导体封装工艺流程的重要指标,对于芯片可靠性评价和失效分析具有重要的意义。
2、目前,对芯片键合拉力与剪切力测试,主要方法是用键合剪切力测试仪,选用合适的拉钩和推刀,对芯片上的键合丝施加拉力,或键合点施加推力,同时监控推或拉力值。
3、常规键合剪切力测试仪主要分为显微镜、带力值传感器的推力或拉力模块及其移动控制单元、样品台以及用于力学数据收集处理的控制计算机组成。使用时,在显微镜的观察下,通过控制器将推拉力模块中的拉钩或推刀移动到芯片对应的初始位置悬停,例如键合丝底部或键合点侧面,要求悬停时推刀或拉钩不接触芯片,否则会对测试力值带来影响,同时在整个移动过程中,推刀或拉钩不应对芯片本身结构造成破坏性损伤,最后设定程序定向移动拉钩或推刀,使之接触芯片键合丝或键合点,同时测量接触过程中的拉力或推力,得到该芯片的键合和剪切强度数据。
4、随着芯片集成度越来越高,制造工艺尺度越来越精细,生产出来的芯片尺寸也越来越小,小尺寸高密度的芯片给键合和剪切强度的测试带来了极大的不利,测试人员在移动拉钩或推刀的过程中,即使在显微镜下操作,也很难保证不碰撞芯片,在键合丝和键合点密度过高时,将拉钩或推刀悬停在对应位置也十分困难。对于小尺寸芯片的键合和剪切强度测试,需耗费更多的时间和精力,而且操作过程中极易引发人为缺陷,影响测试结果。
技术实现思路
1、针对现有技术的缺陷,本申请的目的在于提供一种芯片键合拉力与剪切力的自动化测试装置及方法,旨在解决目前的芯片键合拉力与剪切力因芯片尺寸减小而造成的效率低下以及可操作性不强的问题。
2、为实现上述目的,本申请提供了一种芯片键合拉力与剪切力的自动化测试装置,包括:样品台、三维扫描单元、路径获取单元、推拉力施加单元和移动控制单元;
3、样品台的上方设置有推拉力施加单元;移动控制单元与推拉力施加单元相连;三维扫描单元与路径获取单元相连;
4、样品台用于将待处理芯片固定;三维扫描单元用于确定待处理芯片的键合丝和键合点的空间分布,生成空间分布3d成像图,传输至路径获取单元;路径获取单元用于对待处理芯片键合丝和键合点的空间分布3d成像图进行识别判断,计算出拉钩或推刀的运动路径;推拉力施加单元配备有不同尺寸和量程的拉钩或推刀工装,用于对待处理芯片键合丝施加拉力或对键合点施加剪切力,并通过力传感器记录待处理芯片能够接受的力值;移动控制单元用于将推拉力施加单元沿路径获取单元所规划的路径运送到指定位置,并进行推拉力测试动作。
5、进一步优选地,路径获取单元用于利用训练好的路径获取模型,对待处理芯片键合丝和键合点的空间分布3d成像图进行识别判断;其中,路径获取模型是基于样本进行学习训练得到的,以获取对于不同芯片的路径获取能力。
6、另一方面,本申请提供了一种芯片键合拉力与剪切力的自动化测试方法,包括以下步骤:
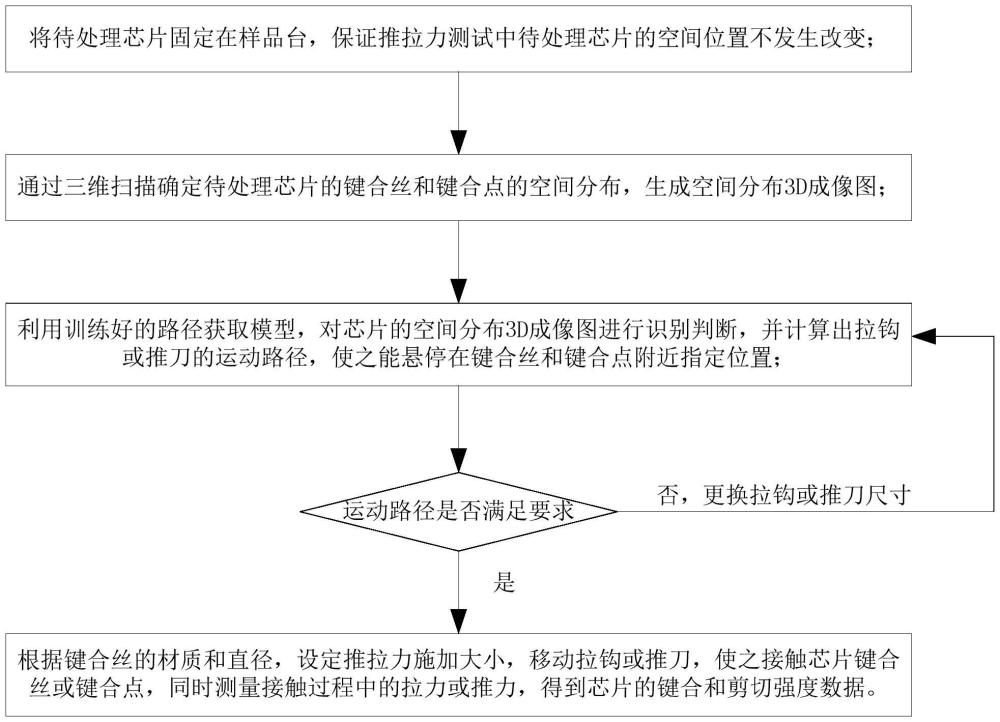
7、步骤s1:通过三维扫描确定待处理芯片的键合丝和键合点的空间分布,生成空间分布3d成像图;
8、步骤s2:利用训练好的路径获取模型,对待处理芯片的空间分布3d成像图进行识别判断,并计算出拉钩或推刀的运动路径,以便拉钩或推刀悬停在键合丝和键合点对应位置;
9、步骤s3:判断步骤s2是否计算得到满足要求的拉钩或推刀的运动路径,若满足要求,则转至步骤s4,否则,更换拉钩或推刀尺寸,转至步骤s2;
10、步骤s4:根据键合丝的材质和直径,设定推拉力施加大小,移动拉钩或推刀,使拉钩或推刀接触待处理芯片键合丝或键合点,同时测量接触过程中的推力或拉力,获取待处理芯片的键合和剪切强度数据。
11、进一步优选地,路径获取模型是基于样本进行学习训练得到的,以实现对不同芯片的路径获取能力。
12、进一步优选地,步骤s3中运动路径需要满足的要求为:
13、在拉钩或推刀沿运动路径移动过程中未接触到待处理芯片,且拉钩或推刀能够悬停在键合丝正下方或键合点侧面。
14、进一步优选地,步骤s3具体包括以下步骤:
15、判断拉钩或推刀沿运动路径移动过程中,是否接触到待处理芯片,且拉钩或推刀能否悬停在键合丝正下方或键合点侧面,若均满足,则判定路径获取模型运算出满足要求的运动路径,否则,选择更小尺寸的拉钩或推刀,执行步骤s2,若仍无法得到满足要求的运动路径,则继续减小拉钩或推刀的尺寸,执行步骤s2,直至得到满足要求的运动路径;若采用最小拉钩或推刀执行步骤s2,获取的运动路径无法满足要求,则终止推拉力测试。
16、进一步优选地,路径获取模型是利用大数据处理和机器学习技术,进行样本采集和模型训练得到ai识别模型。
17、总体而言,通过本申请所构思的以上技术方案与现有技术相比,具有以下有益效果:
18、本申请提供了一种芯片键合拉力与剪切力的自动化测试装置,通过样品台将待处理芯片固定,再利用三维扫描单元扫描待测芯片,可以保证推拉力测试中待处理芯片本身的空间位置不发生改变,三维扫描生成待处理芯片空间分布3d成像图能够精确指出待测芯片键合丝和键合点分布,以及空间各部位尺寸大小,减少肉眼通过显微镜观察的人为误差。
19、本申请提供了一种芯片键合拉力与剪切力的自动化测试装置,利用训练好的路径获取模型,对芯片的空间分布3d图像进行识别判断,结合拉钩或推刀尺寸,计算出拉钩或推刀在芯片上方的运动路径,精准地避免人工操作时拉钩或推刀碰撞芯片上的键合丝及键合点等带来的损害,提高生产效率并减少不必要的损伤。
20、本申请提供了一种芯片键合拉力与剪切力的自动化测试方法,利用训练好的路径获取模型计算出拉钩或推刀在芯片上方的运动路径,若拉钩或推刀的尺寸无法运算出满足要求的运动路径,则选择更小尺寸的拉钩或推刀,重新利用路径获取模型进行运算,此方法极大地提升了对于尺寸更小的先进封装芯片的键合拉力与剪切力测试的能力。
技术特征:1.一种芯片键合拉力与剪切力的自动化测试装置,其特征在于,包括:样品台、三维扫描单元、路径获取单元、推拉力施加单元和移动控制单元;
2.根据权利要求1所述的自动化测试装置,其特征在于,路径获取单元用于利用训练好的路径获取模型,对待处理芯片键合丝和键合点的空间分布3d成像图进行识别判断;其中,路径获取模型是基于样本进行学习训练得到的,以获取对于不同芯片的路径获取能力。
3.一种基于权利要求1或2所述的自动化测试装置的自动化测试方法,其特征在于,包括以下步骤:
4.根据权利要求3所述的自动化测试方法,其特征在于,路径获取模型是基于样本进行学习训练得到的,以实现不同芯片的路径获取能力。
5.根据权利要求3或4所述的自动化测试方法,其特征在于,步骤s3中运动路径需要满足的要求为:
6.根据权利要求5所述的自动化测试方法,其特征在于,步骤s3具体包括以下步骤:
7.根据权利要求4所述的自动化测试方法,其特征在于,路径获取模型是利用大数据处理和机器学习技术,进行样本采集和模型训练得到ai识别模型。
技术总结本申请提供了一种芯片键合拉力与剪切力的自动化测试装置及方法,属于微电子可靠性试验与失效技术领域,其中,三维扫描单元确定待处理芯片的键合丝和键合点的空间分布,生成空间分布3D成像图;路径获取单元对空间分布3D成像图进行识别判断,计算出拉钩或推刀的运动路径;推拉力施加单元配备有不同尺寸和量程的拉钩或推刀工装,对待处理芯片键合丝施加拉力或对键合点施加剪切力,并通过力传感器记录待处理芯片能够接受的力值;移动控制单元将推拉力施加单元沿路径获取单元所规划的路径运送到指定位置,并进行推拉力测试动作。本申请极大地提升了对于尺寸更小的先进封装芯片的键合拉力与剪切力测试的能力。技术研发人员:王国雄,孙鹏越,姜宇航,陈雨浩受保护的技术使用者:中国船舶集团有限公司第七〇九研究所技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340676.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。