一种用于贮箱筒段环缝焊接的变尺寸环形内撑机构
- 国知局
- 2024-12-06 12:20:31
本发明涉及环缝焊接,尤其涉及一种用于贮箱筒段环缝焊接的变尺寸环形内撑机构。
背景技术:
1、随着太空探索研究需求的增加,运载火箭的尺寸越来越大,随之而来的是火箭相关制作工艺的改变,其中大尺寸火箭贮箱的焊接工艺发展为搅拌摩擦焊。为解决搅拌摩擦焊对贮箱薄壁造成的变形,现有实施方案中贮箱筒段环缝焊接使用内撑机构进行反向支撑。内撑机构分为液压自动伸展支撑机构和手动装接杆系支撑机构两种,液压自动伸展支撑机构应用于贮箱初始环段焊接,由圆盘平台、中轴机构、径向液压机构、花瓣型内撑块、手动楔形块等组成,手动装接杆系支撑机构应用于贮箱最后环段封装焊接,由中心轴、各杆系结构、花瓣内撑块等组成。但由于空间局限性,最后环段密封焊接时,只能通过贮箱盖人孔将杆系支撑机构分件由人工运送至贮箱内,拼装成整体进行支撑,焊接结束后再由人工拆卸出人孔,整个过程难度大、效率低。
2、现有技术中,一种大直径贮箱筒段环缝焊接的蛇形内支撑装置,由中间单元、首段单元、尾段单元、中间连接模块和首尾自锁模块组成,首尾自锁模块通过自锁状态与断开状态的转换,分别控制首段单元和尾段单元的密贴自锁与活动打开,进而控制蛇形内撑装置的整周圆环态与自由运动态,在焊接完成后可自行从人孔钻出。但是,该支撑装置对制造工艺要求极为严格,成圆度无法保证,且无法适应不同尺寸贮箱环段焊接作业时的内撑。因此,急需一种自动支撑机构,在焊接结束后能自由钻出人孔,以解决贮箱最后环段焊接时面临的人工拆装难度大、效率低的问题,并且能够适应不同的火箭尺寸。
3、因此,本领域的技术人员致力于提供一种用于贮箱筒段环缝焊接的变尺寸环形内撑机构,以适应不同尺寸火箭贮箱焊缝焊接支撑要求,并能自行从贮箱人孔退出。
技术实现思路
1、有鉴于现有技术上的缺陷,本发明所要解决的技术问题是如何提供一种能够适应不同尺寸贮箱焊缝的焊接支撑结构。
2、为实现上述目的,本发明提供了一种用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,包括:
3、首单元,其内部一端连接有一个关节连接单元,另一端连接自锁单元;
4、尾单元,其内部一端设有一个驱动机构,另一端连接所述自锁单元;
5、至少两个关节单元,所述关节单元的内部一端设有一个驱动机构,另一端连接有一个关节连接单元;
6、自锁单元,其两端分别连接所述首单元和所述尾单元,其具有自锁状态和解锁状态;
7、关节连接单元,其分别与所述首单元或一个所述关节单元或连接;
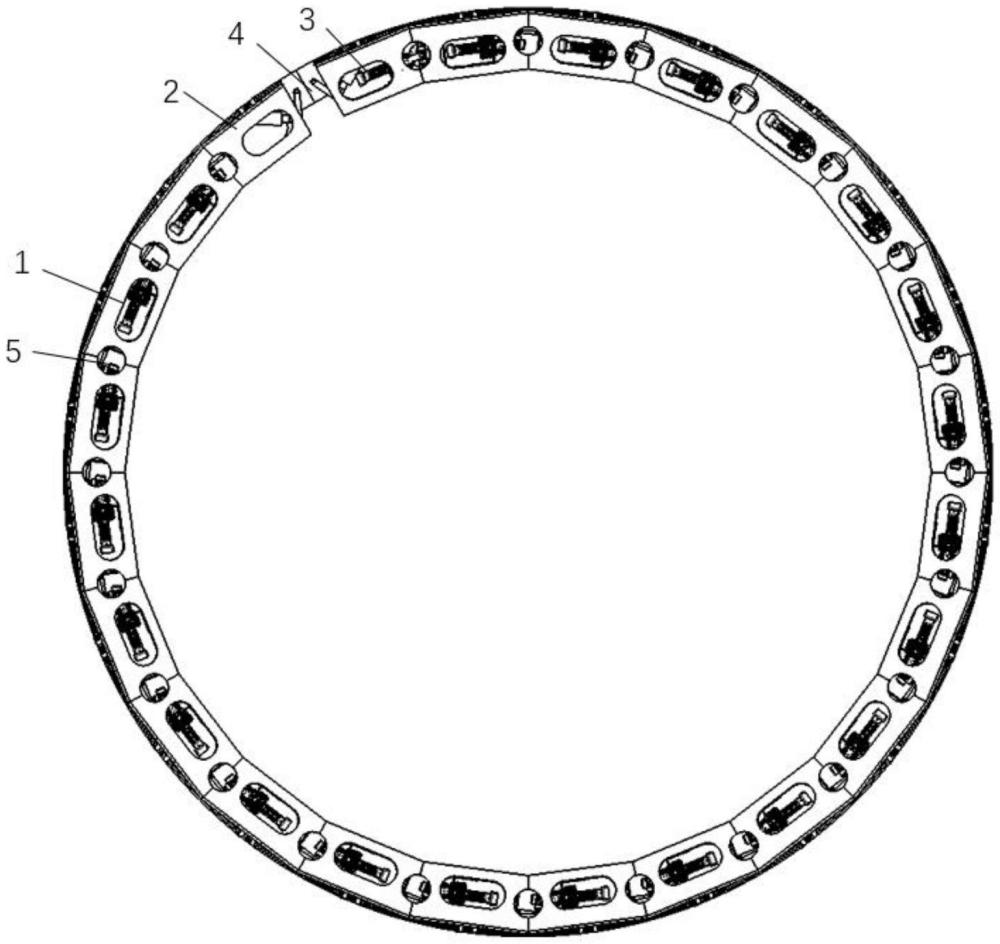
8、所述环形内撑机构处于支撑状态时,所述首单元、所述尾单元、所述至少两个关节单元呈环形分布,所述自锁单元处于自锁状态,所述尾单元的驱动机构、所述关节单元的驱动机构沿相同的环向分别连接至相邻的所述关节连接单元,所述环形内撑机构的环形外侧用于支撑筒段;
9、所述环形内撑机构处于回收状态时,所述自锁单元处于解锁状态;
10、所述驱动机构能够推动和转动所述关节连接单元。
11、进一步地,所述首单元、尾单元包括主体框架、连接装置、弧形支撑单元,所述连接装置沿所述主体框架的周向方向设置,所述弧形支撑单元设置在所述连接装置上,所述弧形支撑单元用于支撑筒段。
12、进一步地,所述关节单元包括主体框架、连接装置、弧形支撑单元和所述驱动机构,所述连接装置沿所述主体框架的周向方向设置,所述弧形支撑单元设置在所述连接装置上,所述驱动机构设于所述主体框架的内部,所述弧形支撑单元用于支撑筒段。
13、进一步地,所述连接装置上设有导向槽,所述弧形支撑单元通过所述导向槽与所述连接装置连接,所述弧形支撑单元能够沿着所述导向槽移动。
14、优选地,所述关节单元还包括楔形块,所述楔形块支撑所述弧形支撑单元。
15、进一步地,所述驱动机构包括结构支撑板、推出电缸、平移支撑轨道、旋转电机,所述平移支撑轨道设在所述结构支撑板上,所述平移支撑轨道为所述结构支撑板提供移动限位;所述推出电缸的输出端与所述结构支撑板连接,所述推出电缸推动所述结构支撑板移动;所述旋转电机固设在所述结构支撑板上。
16、优选地,所述旋转电机的输出端连接有第一锥齿轮。
17、进一步地,所述关节连接单元包括十字球铰、十字球铰支撑臂、齿轮轴、第二锥齿轮、小齿轮、大齿轮、十字球铰连接臂、十字球铰连接板,所述十字球铰支撑臂固设在所述结构支撑板上,所述齿轮轴与所述十字球铰支撑臂垂直连接,所述第二锥齿轮、所述小齿轮设在所述齿轮轴上,所述第二锥齿轮与所述第一锥齿轮啮合,所述十字球铰与所述十字球铰支撑臂可转动地连接,所述大齿轮与所述十字球铰连接,所述大齿轮与所述小齿轮啮合,所述十字球铰连接臂的一端与所述十字球铰连接,所述十字球铰连接板与所述十字球铰连接臂的另一端连接。
18、进一步地,所述自锁单元包括自锁支撑块、支撑杆、自锁电缸,所述自锁支撑块、支撑杆、自锁电缸各两组,呈对称分布;两个所述自锁支撑块相配合,所述支撑杆的一端与所述自锁支撑块可转动地连接,所述支撑杆的另一端与其中一个所述主体框架可转动地连接,所述自锁电缸的一端与所述支撑杆可转动地连接,所述自锁电缸的另一端与其中一个所述楔形块连接。
19、优选地,两个所述自锁支撑块采用凹凸圆球配合。
20、本发明至少具有如下有益技术效果:
21、本发明提供的用于贮箱筒段环缝焊接的变尺寸环形内撑机构,在焊接结束后能够自动从贮箱人孔退出,避免了人工拆装的繁琐过程,大幅提高了操作效率和可操作性。内撑机构中弧形支撑可以适应不同直径的贮箱,解决了现有内撑机构在适应不同尺寸贮箱环段焊接内撑需求上的不足。弧形支撑结构成圆,通过设置首尾自锁单元和一定数量的楔形块提高了成圆精度。
22、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:1.一种用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,包括:
2.如权利要求1所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述首单元、尾单元包括主体框架、连接装置、弧形支撑单元,所述连接装置沿所述主体框架的周向方向设置,所述弧形支撑单元设置在所述连接装置上,所述弧形支撑单元用于支撑筒段。
3.如权利要求1所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述关节单元包括主体框架、连接装置、弧形支撑单元和所述驱动机构,所述连接装置沿所述主体框架的周向方向设置,所述弧形支撑单元设置在所述连接装置上,所述驱动机构设于所述主体框架的内部,所述弧形支撑单元用于支撑筒段。
4.如权利要求2或3所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述连接装置上设有导向槽,所述弧形支撑单元通过所述导向槽与所述连接装置连接,所述弧形支撑单元能够沿着所述导向槽移动。
5.如权利要求3所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述关节单元还包括楔形块,所述楔形块支撑所述弧形支撑单元。
6.如权利要求1所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述驱动机构包括结构支撑板、推出电缸、平移支撑轨道、旋转电机,所述平移支撑轨道设在所述结构支撑板上,所述平移支撑轨道为所述结构支撑板提供移动限位;所述推出电缸的输出端与所述结构支撑板连接,所述推出电缸推动所述结构支撑板移动;所述旋转电机固设在所述结构支撑板上。
7.如权利要求6所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述旋转电机的输出端连接有第一锥齿轮。
8.如权利要求7所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述关节连接单元包括十字球铰、十字球铰支撑臂、齿轮轴、第二锥齿轮、小齿轮、大齿轮、十字球铰连接臂、十字球铰连接板,所述十字球铰支撑臂固设在所述结构支撑板上,所述齿轮轴与所述十字球铰支撑臂垂直连接,所述第二锥齿轮、所述小齿轮设在所述齿轮轴上,所述第二锥齿轮与所述第一锥齿轮啮合,所述十字球铰与所述十字球铰支撑臂可转动地连接,所述大齿轮与所述十字球铰连接,所述大齿轮与所述小齿轮啮合,所述十字球铰连接臂的一端与所述十字球铰连接,所述十字球铰连接板与所述十字球铰连接臂的另一端连接。
9.如权利要求2所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,所述自锁单元包括自锁支撑块、支撑杆、自锁电缸,所述自锁支撑块、支撑杆、自锁电缸各两组,呈对称分布;两个所述自锁支撑块相配合,所述支撑杆的一端与所述自锁支撑块可转动地连接,所述支撑杆的另一端与其中一个所述主体框架可转动地连接,所述自锁电缸的一端与所述支撑杆可转动地连接,所述自锁电缸的另一端与其中一个所述楔形块连接。
10.如权利要求9所述的用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,其特征在于,两个所述自锁支撑块采用凹凸圆球配合。
技术总结本发明公开了用于贮箱筒段焊缝焊接的变尺寸环形内撑机构,包括:首单元、尾单元、至少两个关节单元、自锁单元、关节连接单元,所述环形内撑机构处于支撑状态时,所述首单元、所述尾单元、所述至少两个关节单元呈环形分布,所述自锁单元处于自锁状态,所述尾单元的驱动机构、所述关节单元的驱动机构沿相同的环向分别连接至相邻的所述关节连接单元,所述环形内撑机构的环形外侧用于支撑筒段;所述环形内撑机构处于回收状态时,所述自锁单元处于解锁状态。本发明实现了环形内撑机构的自动退出,并能够适应不同尺寸的贮箱。技术研发人员:王皓,陈根良,李煌灵,王哲,陈寅,王卓识受保护的技术使用者:上海交通大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/340752.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表