一种脊柱侧弯三维重建控制方法及系统与流程
- 国知局
- 2024-12-06 12:47:54
本发明涉及数据处理,特别是指一种脊柱侧弯三维重建控制方法及系统。
背景技术:
1、传统的脊柱侧弯三维重建方法通常基于医学影像数据,如x光、ct或mri等,这些数据虽然提供了较高的精度,但存在辐射暴露、成本高昂以及无法实时动态监测等缺点。因此,近年来基于无辐射、低成本且可实时跟踪的人体运动捕捉数据进行脊柱侧弯三维重建的方法逐渐受到关注。
2、然而,这类方法在数据处理方面仍存在一些缺陷,主要包括以下几点:
3、例如,直接从人体运动捕捉设备获取的原始关节点数据往往包含大量的噪声和抖动,这会导致生成的脊柱曲线不够平滑,进而影响三维重建的精度和可视化效果。
4、现有的方法在处理动态变化的脊柱形态时,有的缺乏有效的动态调整机制。这意味着当个体在运动过程中脊柱形态发生变化时,重建模型可能无法及时准确地反映这些变化。
技术实现思路
1、本发明要解决的技术问题是提供一种脊柱侧弯三维重建控制方法及系统,能够更真实地反映个体在运动状态下的脊柱形态,提高了模型的动态适应性。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种脊柱侧弯三维重建控制方法,所述方法包括:
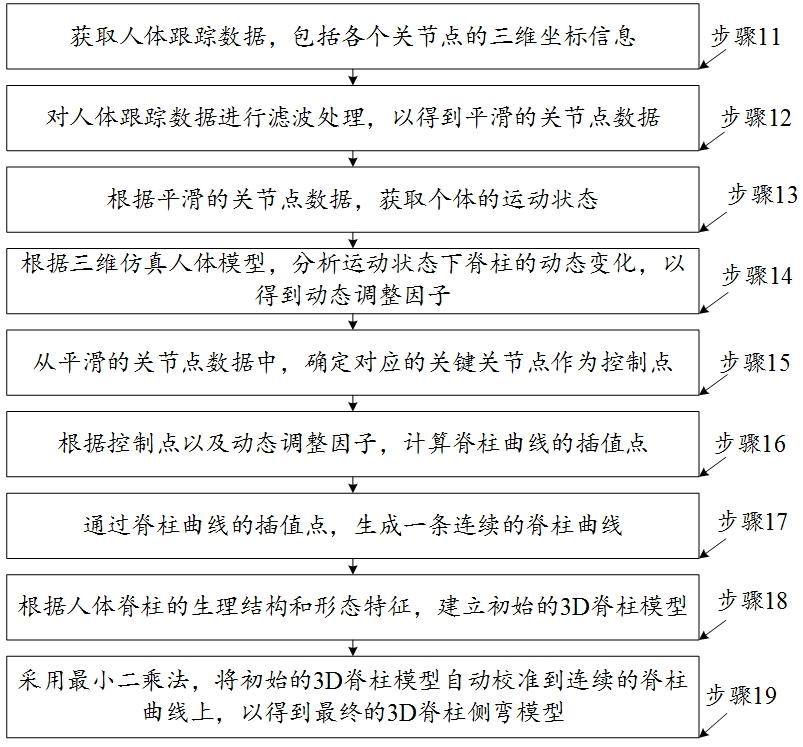
4、获取人体跟踪数据,包括各个关节点的三维坐标信息;
5、对人体跟踪数据进行滤波处理,以得到平滑的关节点数据;
6、根据平滑的关节点数据,获取个体的运动状态;
7、根据三维仿真人体模型,分析运动状态下脊柱的动态变化,以得到动态调整因子;
8、从平滑的关节点数据中,确定对应的关键关节点作为控制点;
9、根据控制点以及动态调整因子,计算脊柱曲线的插值点;
10、通过脊柱曲线的插值点,生成一条连续的脊柱曲线;
11、根据人体脊柱的生理结构和形态特征,建立初始的3d脊柱模型;
12、采用最小二乘法,将初始的3d脊柱模型自动校准到连续的脊柱曲线上,以得到最终的3d脊柱侧弯模型。
13、进一步的,对人体跟踪数据进行滤波处理,以得到平滑的关节点数据,包括:
14、确定高斯滤波器的窗口大小l和标准差;
15、根据窗口大小l,创建一个一维数组来存储窗口内的数据点;
16、根据标准差,计算高斯滤波器的权重;
17、对于给定的关节点时间序列数据,从第一个数据点开始遍历,直到最后一个数据点,对于当前遍历到的数据点,将其作为窗口的中心点,并选择其前后各(l-1)/2个数据点填充到窗口中;
18、根据高斯滤波器的权重,对窗口内的每个数据点进行加权,将加权和除以权重的总和,得到当前窗口中心点的滤波后值;
19、将计算得到的滤波后值替换原始序列中对应位置的数据点,将窗口向前滑动一个数据点,直到遍历完整个关节点时间序列,将滤波后的关节点时间序列保存为平滑的关节点数据。
20、进一步的,根据三维仿真人体模型,分析运动状态下脊柱的动态变化,以得到动态调整因子,包括:
21、确定用于描述脊柱动态变化的关键指标;
22、从运动数据中提取脊柱随时间变化的运动轨迹;
23、对于每个关键指标,计算其在运动过程中的变化量;
24、为每个关键指标设定一个基准值,计算运动状态下每个关键指标的实际值与基准值之间的偏差;
25、根据所有关键指标的偏差,通过加权求和以获得综合评估结果;
26、根据综合评估结果,计算反映脊柱在运动状态下的动态变化程度的动态调整因子。
27、进一步的,根据所有关键指标的偏差,通过加权求和以获得综合评估结果,包括:
28、根据所有关键指标的偏差,通过以获得综合评估结果;
29、其中,是一个对数函数;是一个求和符号,表示将所有评估指标的加权偏差进行累加,代表指标的总数;是第个评估指标在时间的权重;是对偏差的绝对值取平方根;表示第个指标的偏差。
30、进一步的,根据综合评估结果,计算反映脊柱在运动状态下的动态变化程度的动态调整因子,包括:
31、根据综合评估结果,通过计算反映脊柱在运动状态下的动态变化程度的动态调整因子;
32、其中,是一个比例因子,比较当前的综合评估结果与基准状态的对数值;是一个环境敏感度调整因子,其中,表示表示从0到10的环境敏感度指数。
33、进一步的,控制点包括颈椎、胸椎、腰椎区域的中心点。
34、进一步的,根据控制点以及动态调整因子,计算脊柱曲线的插值点,包括:
35、在相邻的控制点之间,通过初步定义脊柱曲线的形状,其中,是插值点的坐标;是参数,表示插值的位置,取值从0到1;和分别表示第和第个控制点;
36、将动态调整因子作为参数,对初步定义的脊柱曲线进行形状调整,以得到调整后的插值点,其中,调整后的插值点的计算公式为:
37、;
38、其中,;、和是调整参数;表示调整后的第个插值点的坐标;
39、设定脊柱曲线上插值点的步长;
40、根据初步定义脊柱曲线的形状以及调整后的插值点,按照设定的脊柱曲线上插值点的步长,通过计算脊柱曲线的插值点,其中,,表示设定的步长;表示插值点的数量;是一个整数索引,表示当前插值点的序号;是最终计算得到的第个插值点的坐标;是根据插值参数计算出的调整后的插值点的坐标。
41、第二方面,一种脊柱侧弯三维重建控制系统,包括:
42、获取模块,用于获取人体跟踪数据,包括各个关节点的三维坐标信息;
43、滤波模块,用于对人体跟踪数据进行滤波处理,以得到平滑的关节点数据;
44、调整模块,用于根据平滑的关节点数据,获取个体的运动状态;根据三维仿真人体模型,分析运动状态下脊柱的动态变化,以得到动态调整因子;
45、确定模块,用于从平滑的关节点数据中,确定对应的关键关节点作为控制点;根据控制点以及动态调整因子,计算脊柱曲线的插值点;通过脊柱曲线的插值点,生成一条连续的脊柱曲线;
46、处理模块,用于根据人体脊柱的生理结构和形态特征,建立初始的3d脊柱模型;采用最小二乘法,将初始的3d脊柱模型自动校准到连续的脊柱曲线上,以得到最终的3d脊柱侧弯模型。
47、第三方面,一种计算设备,包括:
48、一个或多个处理器;
49、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现所述的方法。
50、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现所述的方法。
51、本发明的上述方案至少包括以下有益效果。
52、通过获取人体跟踪数据,并对这些数据进行滤波处理,从而得到平滑的关节点数据,有效地消除了原始数据中的噪声和异常值。
53、本方法不仅考虑了脊柱的静态结构,还通过引入动态调整因子,实时分析并调整脊柱曲线的形状。这使得重建出的3d脊柱侧弯模型能够更真实地反映个体在运动状态下的脊柱形态,提高了模型的动态适应性。
54、通过采用最小二乘法将初始3d脊柱模型自动校准到连续的脊柱曲线上,本方法能够生成与个体实际脊柱形态高度吻合的3d脊柱侧弯模型。本方法提供的脊柱侧弯三维重建控制流程自动化程度高,能够快速生成准确的3d脊柱侧弯模型。
本文地址:https://www.jishuxx.com/zhuanli/20241204/342810.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。