面向检索的三维模型表面特征自适应采样方法
- 国知局
- 2024-12-06 12:55:00
本技术涉及计算机辅助设计,尤其涉及一种面向检索的三维模型表面特征自适应采样方法。
背景技术:
1、随着计算机辅助设计技术的广泛应用,大量的三维模型被创建并被储存在企业和组织的模型库中。对已有三维模型的有效管理能够显著减少从零开始创建新模型的时间和成本,这成为了提升企业设计效率的关键因素。
2、在三维模型检索任务中,一个基础且关键的步骤是对三维模型表面进行采样。但现有对三维模型表面的采样存在如下问题:
3、首先,由于三维模型表面的不同区域对于识别三维模型并非同等重要,因此,使用无区分度的采样方法,如传统的随机采样和均匀采样,很可能会对三维模型表面较为平滑的区域过度采样,而对具有明显几何特征的区域欠采样,这可能会导致无法有效捕捉到三维模型表面的重要特征,并且在使用采样结果执行后续的检索任务时,精准度降低,计算资源利用率低。
4、其次,目前已有解决随机采样和均匀采样存在问题的方案,例如名称为《曲面自适应采样方法、装置、存储介质及计算机设备》,公开号为:cn117197397a,国别:中国,公开日期为:2023.12.08的发明专利,其中提出的采样方案基于待采样曲面在每个网格单元内的曲面变化幅度,对初始网格中的网格单元进行自适应调整,并根据调整后的网格单元确定内部采样点,之后结合边界采样点与内部采样点来计算待采样曲面的采样点集。又例如文献《sampling point planning for complex surface inspection based on featurepoints under area division》,(sun, j., xiang, s., zhou, t., cheng, t, 《theinternational journal of advanced manufacturing technology》, 2023, 127(1),717–732.)中记载:基于复杂曲面的曲率特性,将其划分为平坦区域和锐边区域。在规划采样方案时,在平坦区域使用均匀分布的采样策略;在锐边区域进行特征点定义和搜索,采用基于特征点的曲率自适应采样策略。然而上述这些依赖曲面几何运算的采样方法应用在三维模型检索时,尤其是在包含丰富细节信息的三维模型数据库中进行检索时,会产生高昂的计算开销,并且会引发很高的时间复杂度和计算复杂度。
5、因此,有必要提出一种方案以改善上述相关技术方案中存在的一个或者多个问题。
6、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本技术实施例提供一种面向检索的三维模型表面特征自适应采样方法,该方法包括以下步骤:
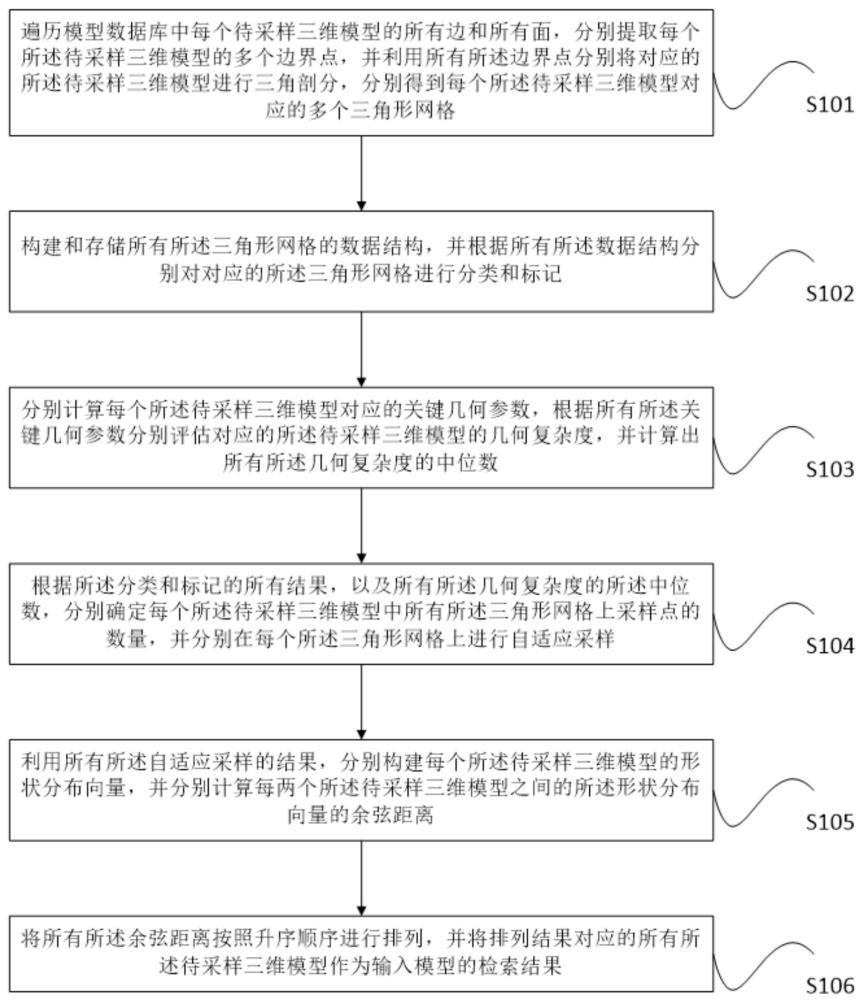
2、遍历模型数据库中每个待采样三维模型的所有边和所有面,分别提取每个所述待采样三维模型的多个边界点,并利用所有所述边界点分别将对应的所述待采样三维模型进行三角剖分,分别得到每个所述待采样三维模型对应的多个三角形网格;
3、构建和存储所有所述三角形网格的数据结构,并根据所有所述数据结构分别对对应的所述三角形网格进行分类和标记;
4、分别计算每个所述待采样三维模型对应的关键几何参数,根据所有所述关键几何参数分别评估对应的所述待采样三维模型的几何复杂度,并计算出所有所述几何复杂度的中位数;
5、根据所述分类和标记的所有结果,以及所有所述几何复杂度的所述中位数,分别确定每个所述待采样三维模型中所有所述三角形网格上采样点的数量,并分别在每个所述三角形网格上进行自适应采样;
6、利用所有所述自适应采样的结果,分别构建每个所述待采样三维模型的形状分布向量,并分别计算每两个所述待采样三维模型之间的所述形状分布向量的余弦距离;
7、将所有所述余弦距离按照升序顺序进行排列,并将排列结果对应的所有所述待采样三维模型作为输入模型的检索结果。
8、本技术的一示例性实施例中,所述并利用所有所述边界点分别将对应的所述待采样三维模型进行三角剖分,分别得到每个所述待采样三维模型对应的多个三角形网格的步骤包括:
9、根据所有所述边界点分别计算出对应的所述待采样三维模型的所有边界框,每个所述待采样三维模型的所有所述边界框分别包含对应的所述待采样三维模型中的所有极值点;
10、针对每个所述待采样三维模型,分别构建三角形模型,并使每个所述三角形模型均包含对应的所述待采样三维模型的所有所述边界点,利用bowyer-watson算法逐一将所有所述边界点插入对应的所述三角剖分中;每插入一个所述边界点后,都要移除所有与所述三角形模型相关的辅助顶点,并对所述三角剖分进行迭代更新,直至所有所述边界点均被插入对应的所述三角剖分中;
11、将所有所述边界点全部插入对应的所述三角剖分中后,分别将所有所述三角形模型的质心插入对应的所述三角剖分中,并分别对所有所述三角剖分进行迭代优化调整;
12、分别将所有所述边界点和所有所述三角形模型投影至三维空间中,得到每个所述待采样三维模型对应的多个三角形网格;
13、其中,每个所述三角形网格均与对应的所述待采样三维模型的表面贴合,每个所述待采样三维模型中的所有所述三角形网格分别共同覆盖对应的所述待采样三维模型的所有所述面。
14、本技术的一示例性实施例中,所述构建和存储所有所述三角形网格的数据结构,并根据所有所述数据结构分别对对应的所述三角形网格进行分类和标记的步骤包括:
15、对于经过所述三角剖分的所有所述待采样三维模型,分别构建每个所述待采样三维模型中所有顶点、所有所述边,以及所有所述三角形模型之间的映射信息;
16、根据所有所述映射信息,分别对每个所述待采样三维模型中所有所述面对应的所述三角形模型进行所述分类和标记;
17、其中,所述三角形模型的类型包括顶点三角形,边缘三角形和内部三角形;
18、所述映射信息包括:顶点列表、三角形模型列表、顶点-三角形模型哈希表,以及边-三角形模型哈希表;
19、所述顶点列表用来存储所述待采样三维模型中所有所述顶点的坐标;
20、所述三角形模型列表用来存储所述待采样三维模型中所有所述顶点对应的所述三角形模型的索引;
21、所述顶点-三角形模型哈希表用来存储所述待采样三维模型中所有所述顶点,以及分别与每个所述顶点相连的所有所述三角形模型之间的第一映射关联信息;
22、所述边-三角形模型哈希表用来存储所有所述边,以及分别包含每条所述边的所有所述三角形模型之间的第二映射关联信息;
23、所述三角剖分为delaunay三角剖析。
24、本技术的一示例性实施例中,所述根据所述映射信息,分别对每个所述待采样三维模型中所有所述面对应的所述三角形模型进行所述分类和标记的步骤包括:
25、通过所有所述第一映射关联信息分别访问每个所述三角形模型列表,每个所述三角形模型列表均包含分别与每个所述顶点相连的所有所述顶点三角形;
26、遍历所有所述第二映射关联信息,并分别检查每条所述边映射到的所述三角形模型的数量;
27、对于只映射了一个所述三角形模型的所述边,将这条所述边对应的所述三角形模型标记为所述边缘三角形;
28、对于至少映射了两个所述三角形模型的所述边,将这条所述边对应的至少两个所述三角形模型均标记为所述内部三角形。
29、本技术的一示例性实施例中,所述分别计算每个所述待采样三维模型对应的关键几何参数,根据所有所述关键几何参数分别评估对应的所述待采样三维模型的几何复杂度,并计算出所有所述几何复杂度的中位数的步骤包括:
30、分别计算每个所述待采样三维模型的体积与对应的所述边界框的体积之间的体积比率;
31、分别计算每个所述待采样三维模型的等效球体的表面积与所述待采样三维模型的表面积之间的表面积比率;
32、分别计算每个所述待采样三维模型的几何参数比例;
33、根据所述体积比率,所述表面积比率和所述几何参数比例,分别评估每个所述待采样三维模型的所述几何复杂度;
34、计算所有所述几何复杂度的所述中位数;
35、其中,所述关键几何参数包括所述体积比率,所述表面积比率和所述几何参数比例。
36、本技术的一示例性实施例中,所述体积比率的表达式为:
37、(1)
38、其中,表示体积比率,表示待采样三维模型的体积,表示边界框的体积;
39、所述表面积比率的表达式为:
40、 (2)
41、其中,表示表面积比率,表示待采样三维模型的等效球体的表面积,,表示待采样三维模型的表面积;
42、所述几何参数比例的表达式为:
43、 (3)
44、其中,表示几何参数比例,表示待采样三维模型的表面的三角形网格的数量,表示边界框的表面积;
45、所述几何复杂度的表达式为:
46、 (4)
47、其中,表示几何复杂度,表示体积比率对应的第一权重,表示表面积比率对应的第二权重,表示几何参数比例对应的第三权重;
48、所有所述几何复杂度的所述中位数的表达式为:
49、 (5)
50、其中,表示几何复杂度通过sigmoid函数的映射,的取值范围为(0,1),表示所有几何复杂度的中位数。
51、本技术的一示例性实施例中,所述根据所述分类和标记的所有结果,以及所有所述几何复杂度的所述中位数,分别确定每个所述待采样三维模型中所有所述三角形网格上采样点的数量,并分别在每个所述三角形网格上进行自适应采样的步骤包括:
52、分别设定每个所述待采样三维模型的每个所述面上所有所述三角形网格的基线采样点的数量;
53、根据所述基线采样点的数量,所述中位数,以及所述分类和标记的所有结果,分别计算每个所述三角形网格的所述采样点的数量;
54、根据所述采样点的数量,分别在对应的所述待采样三维模型的每个所述面的所有所述三角形网格上进行所述自适应采样。
55、本技术的一示例性实施例中,所述采样点的数量的表达式为:
56、 (6)
57、其中,表示三角形网格的采样点的数量,表示基线采样点的数量,,表示三角形模型对应的几何复杂度的倍率,为正整数;
58、根据所述三角形模型的不同类型,分别设定表示所述顶点三角形对应的所述几何复杂度的倍率,表示所述边缘三角形对应的所述几何复杂度的倍率,表示所述内部三角形对应的所述几何复杂度的倍率,且满足。
59、本技术的一示例性实施例中,所述利用所有所述自适应采样的结果,分别构建每个所述待采样三维模型的形状分布向量,并分别计算每两个所述待采样三维模型之间的所述形状分布向量的余弦距离的步骤包括:
60、分别在每个所述待采样三维模型的所述自适应采样的结果中,任意选取一组采样点组,每组所述采样点组均包括第一采样点和第二采样点,并分别计算每个所述第一采样点和对应的所述第二采样点之间的距离;
61、迭代进行上述步骤,并利用等距直方图来表示迭代计算结果的分布情况;
62、根据所述迭代计算结果的分布情况,分别建立每个所述待采样三维模型的所述形状分布向量;
63、分别计算任意两个所述待采样三维模型的所述形状分布向量之间的余弦距离。
64、本技术的一示例性实施例中,所述第一采样点和对应的所述第二采样点之间的距离的表达式为:
65、 (7)
66、其中,表示第一采样点和对应的第二采样点之间的距离,表示第一采样点的位置坐标,表示与第一采样点对应的第二采样点的位置坐标;
67、利用所述等距直方图来表示所述迭代计算结果的分布情况的步骤包括:
68、迭代计算每个所述第一采样点和对应的所述第二采样点的距离的次数为次;
69、所述等距直方图中区间的数目为,每个所述区间的高度表示为处于所述区间的频率,每个所述待采样三维模型中任意两组所述采样点组的组距的表达式为:
70、(8)
71、其中,表示任意两组采样点组的组距,表示迭代计算结果中的最大值,表示迭代计算结果中的最小值,表示等距直方图中区间的数目;
72、所述等距直方图的高度满足:
73、 (9)
74、其中,表示迭代计算结果处于第个区间的频率,表示迭代计算结果在第个区间的频数,,表示迭代计算的次数;
75、所述余弦距离的表达式为:
76、 (10)
77、其中,表示余弦距离,表示第个待采样三维模型的形状分布向量,表示第个待采样三维模型的形状分布向量,表示向量的范数。
78、有益效果:
79、本技术提供一种面向检索的三维模型表面特征自适应采样方法,至少具有以下有益效果:
80、(1)本技术通过将网格边缘分类技术和几何复杂度分析技术同时引入三维模型采样中,为三维模型检索提供了新的策略,从而能够避免对整个三维模型表面进行密集曲率计算,有效降低了计算复杂度,从而能够更高效的利用计算资源;
81、(2)同时,本技术根据待采样三维模型的几何复杂度动态调整采样策略,更加智能地分配采样点,从而能够更加有效地捕捉待采样三维模型的几何信息,进而优化检索任务。
本文地址:https://www.jishuxx.com/zhuanli/20241204/343028.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表