检测仪器举升结构和检测机器人
- 国知局
- 2024-12-26 16:25:40
本公开涉及机器人检测领域,尤其涉及一种检测仪器举升结构和检测机器人。
背景技术:
1、各种特种机器人都携带各种检测仪器,例如摄像头、传感器等,但是直接固定的仪器在进行检测时可能会存在检测死角,出现扫描不完整的情况。
2、当前,在现有技术中通过在检测仪器上增加升降机构以此来调节检测仪器的高度,进而扩大检测仪器的检测范围,但是升降机构大多数都是采用电推杆直接推动检测仪器升降,那么电推杆只能在起、停两个点位移动,也就是说检测仪器只能在提升到固定的高度,如果需要对检测仪器的高度再次进行调整,那么只能更换电推杆的行程,成本较高,并且更换较为复杂。
3、在发明人实施本公开实施例的过程中发现现有技术存在检测仪器高度调节困难问题。
技术实现思路
1、有鉴于此,本公开实施例提供了一种检测仪器举升结构和检测机器人,至少部分的解决现有技术中存在的对检测仪器高度调整困难的问题。
2、第一方面,本公开实施例提供了一种检测仪器举升结构,包括设置在主体上的驱动件、第一连接件、平行且间隔排列的主连接杆和副连接杆,所述驱动件包括固定部和伸缩部,所述第一连接件一端铰接于所述主体上,所述伸缩部可滑动地设置在所述第一连接件的另一端,以驱使所述第一连接件绕铰接点转动,所述主连接杆一端固定设置在所述第一连接件上,另一端铰接有检测仪器,所述副连接杆的一端铰接于所述主体上,另一端铰接于所述检测仪器上。
3、可选的,所述第一连接件上设有沿所述第一连接件的长度方向延伸的滑动槽,所述伸缩部可滑动地设置在所述滑动槽内。
4、可选的,还包括设置在所述主体上的固定支架,所述主连接杆和所述副连接杆分别铰接于所述固定支架上,所述固定支架、所述主连接杆、所述副连接杆和所述检测仪器形成所述平行四边形机构。
5、可选的,所述主连接杆和所述副连接杆的数量为两个,分别设置在所述固定支架的两侧。
6、可选的,还包括铰接于所述固定支架上的连接轴,所述第一连接件和所述主连接杆通过所述连接轴固定连接。
7、可选的,还包括设置在所述驱动件的驱动端上的第二连接件,所述第一连接件的数量为两个,所述第二连接件的两端分别可滑动地设置在两个所述滑动槽内。
8、可选的,还包括多个旋转轴,两个所述主连接杆通过所述旋转轴铰接于所述检测仪器上,两个所述副连接杆的两端分别通过所述旋转轴铰接于所述固定支架和所述检测仪器上。
9、可选地,所述旋转轴的两端上分别设置有衬套。
10、可选的,所述连接轴和所述固定支架之间设有轴承。
11、第二方面,本公开实施例提供了一种检测机器人,包括主体、检测仪器和以上技术内容中任意一项所述的检测仪器举升结构。
12、本公开实施例提供的检测仪器举升结构,将驱动件的伸缩部安装在第一连接件上,能够将伸缩部的直线运动转化为第一连接件的转动,进而带动检测仪器绕第一连接件的铰接点转动,主连接杆和副连接杆形成平行四边形机构,能够确保检测仪器在转动过程中,其检测方向保持不变,从而实现了检测仪器在高度方向上的调节,通过调节伸缩部在第一连接件上的滑动距离,来改变第一连接件的转动角度范围,进而实现了检测仪器在高度上的可调性。
13、上述说明仅是本公开技术方案的概述,为了能更清楚了解本公开的技术手段,而可依照说明书的内容予以实施,并且为让本公开的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
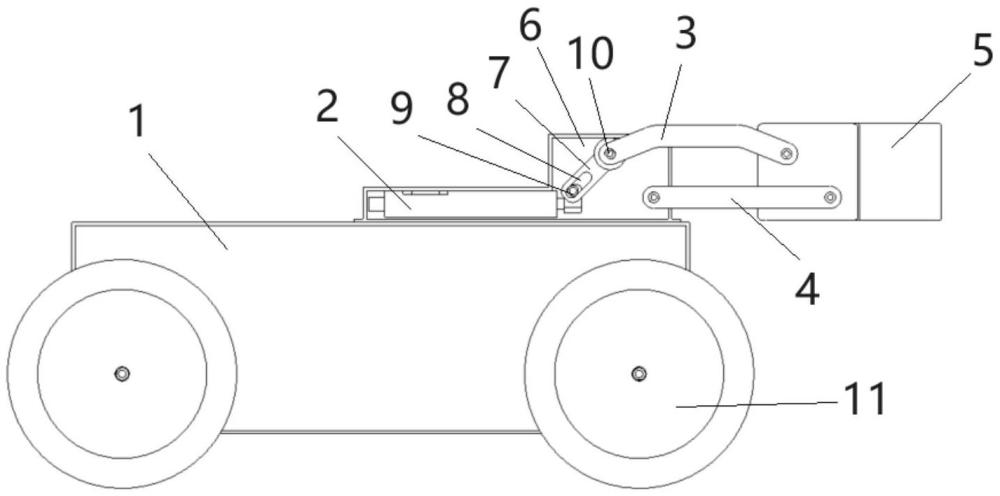
技术特征:1.一种检测仪器举升结构,其特征在于,包括设置在主体(1)上的驱动件(2)、第一连接件(7)、平行且间隔排列的主连接杆(3)和副连接杆(4),所述驱动件(2)包括固定部和伸缩部,所述第一连接件(7)一端铰接于所述主体(1)上,所述伸缩部可滑动地设置在所述第一连接件(7)的另一端,以驱使所述第一连接件(7)绕铰接点转动,所述主连接杆(3)一端固定设置在所述第一连接件(7)上,另一端铰接有检测仪器(5),所述副连接杆(4)的一端铰接于所述主体(1)上,另一端铰接于所述检测仪器(5)上。
2.根据权利要求1所述的检测仪器举升结构,其特征在于,所述第一连接件(7)上设有沿所述第一连接件(7)的长度方向延伸的滑动槽(8),所述伸缩部可滑动地设置在所述滑动槽(8)内。
3.根据权利要求1所述的检测仪器举升结构,其特征在于,还包括设置在所述主体(1)上的固定支架(6),所述主连接杆(3)和所述副连接杆(4)分别铰接于所述固定支架(6)上,所述固定支架(6)、所述主连接杆(3)、所述副连接杆(4)和所述检测仪器(5)形成平行四边形机构。
4.根据权利要求3所述的检测仪器举升结构,其特征在于,所述主连接杆(3)和所述副连接杆(4)的数量为两个,分别设置在所述固定支架(6)的两侧。
5.根据权利要求3所述的检测仪器举升结构,其特征在于,还包括铰接于所述固定支架(6)上的连接轴(10),所述第一连接件(7)和所述主连接杆(3)通过所述连接轴(10)固定连接。
6.根据权利要求2所述的检测仪器举升结构,其特征在于,还包括设置在所述驱动件(2)的驱动端上的第二连接件(9),所述第一连接件(7)的数量为两个,所述第二连接件(9)的两端分别可滑动地设置在两个所述滑动槽(8)内。
7.根据权利要求4所述的检测仪器举升结构,其特征在于,还包括多个旋转轴,两个所述主连接杆(3)通过所述旋转轴铰接于所述检测仪器(5)上,两个所述副连接杆(4)的两端分别通过所述旋转轴铰接于所述固定支架(6)和所述检测仪器(5)上。
8.根据权利要求7所述的检测仪器举升结构,其特征在于,所述旋转轴的两端上分别设置有衬套。
9.根据权利要求5所述的检测仪器举升结构,其特征在于,所述连接轴(10)和所述固定支架(6)之间设有轴承。
10.一种检测机器人,其特征在于,包括主体(1)、检测仪器(5)和权利要求1-9中任意一项所述的检测仪器举升结构。
技术总结本公开实施例公开了一种检测仪器举升结构和检测机器人。其中,检测仪器举升结构包括设置在主体(1)上的驱动件(2)、第一连接件(7)、平行且间隔排列的主连接杆(3)和副连接杆(4),驱动件(2)包括固定部和伸缩部,第一连接件(7)一端铰接于主体(1)上,伸缩部可滑动地设置在第一连接件(7)的另一端,以驱使第一连接件(7)绕铰接点转动,主连接杆(3)一端固定设置在第一连接件(7)上,另一端铰接有检测仪器(5),副连接杆(4)的一端铰接于主体(1)上,另一端铰接于检测仪器(5)上。该装置能够通过调节伸缩部在第一连接件上的滑动距离,来改变第一连接件的转动角度范围,进而实现了检测仪器在高度上的可调性。技术研发人员:杨健健,王国勇,李雨潭,张玉增,刘汝渝,张传金,陈康帅,焦志翔受保护的技术使用者:矿业大学(北京)内蒙古研究院技术研发日:20231228技术公布日:2024/12/12本文地址:https://www.jishuxx.com/zhuanli/20241216/349646.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
马达减振弹簧条的制作方法
下一篇
返回列表