一种棕榈果果实采摘机器人
- 国知局
- 2024-12-26 14:49:47
本设计属于农业机器人领域,具体涉及一种针对棕榈果果实的爬树采摘机器人,可以完成爬树、棕榈果检测与识别、砍伐棕榈叶、采摘棕榈果等工作。
背景技术:
1、油棕是一种热带植物,主要分布在东南亚、非洲、巴西等地。油棕是一种重要的经济作物,其果实富含油脂,被广泛用于食品、生物柴油、化妆品等工业。棕榈果的采摘现阶段主要依靠人工采摘,据统计,人工收割油棕果过程占总工作量的60%,同时占生产成本的50%。这种依赖于人工的采摘方式不仅增加了生产成本,还可能受到人力资源的限制和季节性劳动力短缺的影响,进而影响了采摘效率和产品质量。
2、随着技术的发展和需求的不断增加以及果实自动化采摘技术不断发展,原有的人工采摘方式已经不能满足现代化的生产要求,采摘工作正在向着自动化、智能化不断推进。因此,寻求替代性的采摘方式已成为行业发展的趋势,其中采摘机器人的应用逐渐受到关注和重视。棕榈果采摘不同于一般采摘要求,攀爬高度高,果实质量重,树干表面粗糙,采摘难度大,对采摘机器人的越障能力和抗冲能力有要求。现有采摘机器人不具备较高的攀爬能力和较强的越障能力,同时面对大果实采收瞬间的冲击也无法承受,无法完成对棕榈果的采收工作。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提出一种能够攀爬油棕树、棕榈果检测与识别、砍伐棕榈叶、采摘棕榈果等工作的自动采摘机器人,能够降低工人工作强度,提升油棕果实采摘效率和质量,降低生产成本。本机器人适用于大规模棕榈果园的自动化采摘作业。
2、本发明解决上述技术问题采用如下技术方案:一种棕榈果果实采摘机器人,所述果实采摘机器人包括爬树机构、采摘机构、感知与主控模块;爬树机构用于使果实采摘机器人能够沿着30°的螺旋角平稳地沿树干螺旋爬升或下降;采摘机构安装在爬树机构的机身上,用于对果实进行采摘;感知与主控模块安装在爬树机构和采摘机构上,用于对整个果实采摘机器人进行控制。
3、所述爬树机构包括夹持环抱机构和攀爬机构,夹持环抱机构用于根据树干的直径自动调节夹爪的开合度,牢固夹持树干;攀爬机构能实现果实采摘机器人能够沿着30°的螺旋角运动。
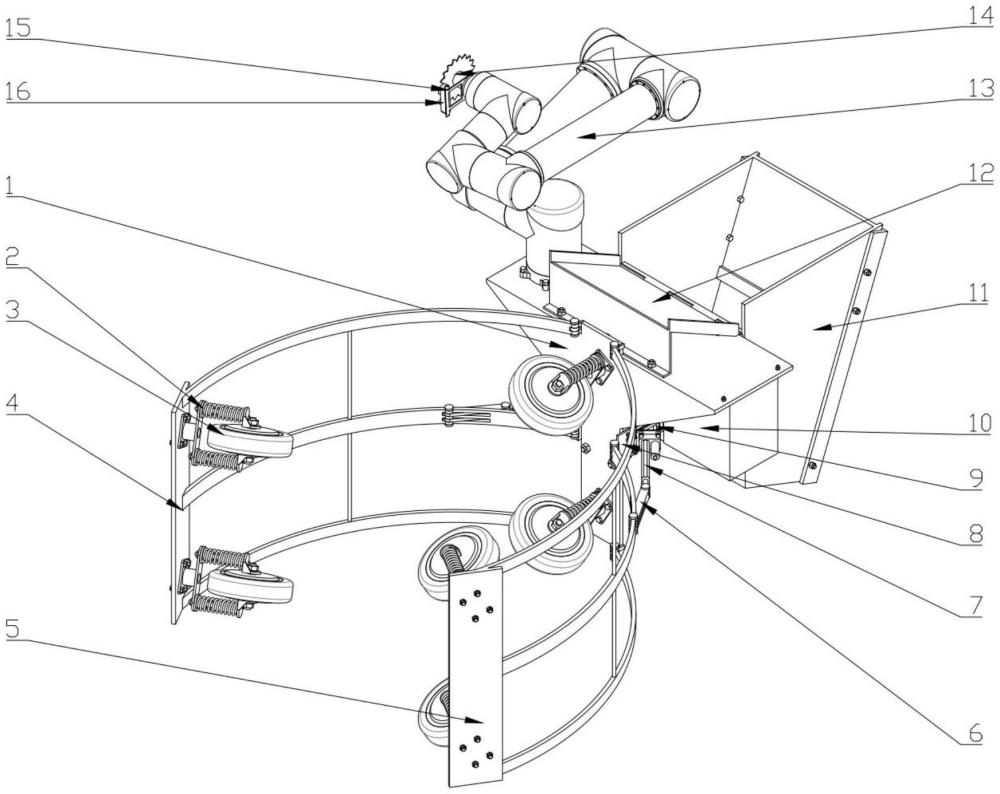
4、夹持环抱机构包括机身、左夹爪、右夹爪、推动杆、电推杠、电推杠底座;左夹爪和右夹爪分别铰接在机身上,能够围绕铰接轴自由转动,用于环抱并夹紧棕榈树树干;推动杆、电推杠、电推杠底座分别轴对称设置有两组,其中,电推杠底座固定在机身上,左右两侧结构相同且对称设置,电推杠底座的前端与左夹爪和右夹爪铰接,用于增加结构刚度,右端用于安装电推杠;电推杠一端固定在电推杠底座上,另一端与推动杆铰接;推动杆一端与电推杠铰接,另一端与左夹爪或右夹爪铰接。
5、攀爬机构包括轮毂电机和弹簧减震器;弹簧减震器的一端固定在左夹爪或右夹爪上,另一端固定连接轮毂电机中间轴。
6、轮毂电机的轮毂面与水平面呈30°角,使机器人能够沿着30°的螺旋角平稳地沿树干螺旋爬升或下降;轮毂电机采用双排主动轮设计,轮毂电机沿重力方向设置为上下两层。
7、所述采摘机构包括机械臂、末端执行器和集果装置;机械臂固定在机身上,用于搭载双目摄像机和圆盘锯,实现双目摄像机和圆盘锯的移动以及从不同角度的观察和采收;末端执行器安装在机械臂上末端,用于实现果实的识别定位和采摘;集果装置安装在机身上,用于收集采摘后的果实。
8、末端执行器包括圆盘锯、双目摄像机底座和双目摄像机;圆盘锯固定在机械臂的末端的转轴上,机械臂的末端转轴旋转,带动圆盘锯,进而用于执行砍伐棕榈叶和采摘果实的操作;双目摄像机底座固定机械臂的末端的壳体上;双目摄像机固定在双目摄像机底座,用于识别和定位果实;
9、集果装置包括集果箱、滑台和柔性减震器;滑台固定安装在机身的平台上,用于引导果实滑向集果箱;集果箱位于机器人背部,集果箱的顶部与机身铰接,用于收集采摘下的果实;柔性减震装置器一端固定在机身上,另一端与集果箱相连,用于确保采收时的机构平稳。
10、机械臂为六自由度机械臂;机械臂的底座固定在机身上。
11、感知模块和主控模块主要包括视觉传感器、激光测距传感器、姿态传感器和控制器;视觉传感器用于检测果实及树枝,安装机械臂的末端壳体上;激光测距传感器、姿态传感器和控制器分别安装在机身上,其中激光测距传感器用于感知运动和目标距离,姿态传感器用于感知机器人本体姿态,控制器用于信号的整机和采摘目标的位置信息和状态信息信号的接收和处理。
12、本发明与与现有技术相比,其有益效果为:
13、(1)本发明设计的棕榈果果实采摘机器人,针对棕榈果单颗果实重、且位置高的特点,能够实现自动抱合的上树、自动识别、自动采摘的功能。能够降低工人工作强度,提升油棕果实采摘效率和质量,降低生产成本。
14、(2)本发明针对由于油棕树树上可能有点结节和叶根,表面粗糙,油棕树树叶巨大,采伐不完备,导致树干表面呈鱼鳞状,摩擦阻力很大的特点设计的攀爬机构,在轮毂电机和机架之间加入弹簧减震器,进而保证机器人能平稳地攀爬,使得在攀爬过程中机器人能够依靠弹簧进行自适应调节,越过障碍部分。
15、(3)本发明攀爬机构中的轮毂电机端面与水平面采用30°的倾角,进而使得棕榈果果实采摘机器人沿30°的倾角螺旋上升,一方面可以避免树上结节和未处理好的棕榈叶叶根造成爬行阻力过大的问题,另一方面可以利用自旋实现机构采收装置运动到指定位置,可以减少做一个旋转平台,使得整体结构更加简单和紧凑,减少机构的增加还能给整体机构减重,减轻运行负担,降低能耗。
16、(4)本发明在机身与集果箱之间设置柔性减震器,减缓棕榈果果实掉落进集果箱时瞬间对整体机构的冲击,确保采收时的棕榈果果实采摘机器人平稳工作。
技术特征:1.一种棕榈果果实采摘机器人,其特征在于,所述果实采摘机器人包括爬树机构、采摘机构、感知与主控模块;爬树机构用于使果实采摘机器人能够沿着30°的螺旋角平稳地沿树干螺旋爬升或下降;采摘机构安装在爬树机构的机身上,用于对果实进行采摘;感知与主控模块安装在爬树机构和采摘机构上,用于对整个果实采摘机器人进行控制。
2.根据权利要求1所述的棕榈果果实采摘机器人,其特征在于,所述爬树机构包括夹持环抱机构和攀爬机构,夹持环抱机构用于根据树干的直径自动调节夹爪的开合度,牢固夹持树干;攀爬机构能实现果实采摘机器人能够沿着30°的螺旋角运动。
3.根据权利要求2所述的棕榈果果实采摘机器人,其特征在于,夹持环抱机构包括机身、左夹爪、右夹爪、推动杆、电推杠、电推杠底座;左夹爪和右夹爪分别铰接在机身上,能够围绕铰接轴自由转动,用于环抱并夹紧棕榈树树干;推动杆、电推杠、电推杠底座分别轴对称设置有两组,其中,电推杠底座固定在机身上,左右两侧结构相同且对称设置,电推杠底座的前端与左夹爪和右夹爪铰接,用于增加结构刚度,右端用于安装电推杠;电推杠一端固定在电推杠底座上,另一端与推动杆铰接;推动杆一端与电推杠铰接,另一端与左夹爪或右夹爪铰接。
4.根据权利要求2所述的棕榈果果实采摘机器人,其特征在于,攀爬机构包括轮毂电机和弹簧减震器;弹簧减震器的一端固定在左夹爪或右夹爪上,另一端固定连接轮毂电机中间轴。
5.根据权利要求4所述的棕榈果果实采摘机器人,其特征在于,轮毂电机的轮毂面与水平面呈30°角,使机器人能够沿着30°的螺旋角平稳地沿树干螺旋爬升或下降;轮毂电机采用双排主动轮设计,轮毂电机沿重力方向设置为上下两层。
6.根据权利要求1所述的棕榈果果实采摘机器人,其特征在于,所述采摘机构包括机械臂、末端执行器和集果装置;机械臂固定在机身上,用于搭载双目摄像机和圆盘锯,实现双目摄像机和圆盘锯的移动以及从不同角度的观察和采收;末端执行器安装在机械臂上末端,用于实现果实的识别定位和采摘;集果装置安装在机身上,用于收集采摘后的果实。
7.根据权利要求6所述的棕榈果果实采摘机器人,其特征在于,末端执行器包括圆盘锯、双目摄像机底座和双目摄像机;圆盘锯固定在机械臂的末端的转轴上,机械臂的末端转轴旋转,带动圆盘锯,进而用于执行砍伐棕榈叶和采摘果实的操作;双目摄像机底座固定机械臂的末端的壳体上;双目摄像机固定在双目摄像机底座,用于识别和定位果实。
8.根据权利要求6所述的棕榈果果实采摘机器人,其特征在于,集果装置包括集果箱、滑台和柔性减震器;滑台固定安装在机身的平台上,用于引导果实滑向集果箱;集果箱位于机器人背部,集果箱的顶部与机身铰接,用于收集采摘下的果实;柔性减震装置器一端固定在机身上,另一端与集果箱相连,用于确保采收时的机构平稳。
9.根据权利要求6所述的棕榈果果实采摘机器人,其特征在于,机械臂为六自由度机械臂;机械臂的底座固定在机身上。
10.根据权利要求6所述的棕榈果果实采摘机器人,其特征在于,感知模块和主控模块主要包括视觉传感器、激光测距传感器、姿态传感器和控制器;视觉传感器用于检测果实及树枝,安装机械臂的末端壳体上;激光测距传感器、姿态传感器和控制器分别安装在机身上,其中激光测距传感器用于感知运动和目标距离,姿态传感器用于感知机器人本体姿态,控制器用于信号的整机和采摘目标的位置信息和状态信息信号的接收和处理。
技术总结本发明公开了一种棕榈果果实采摘机器人,所述果实采摘机器人包括爬树机构、采摘机构、感知与主控模块;爬树机构用于使果实采摘机器人能够沿着30°的螺旋角平稳地沿树干螺旋爬升或下降;采摘机构安装在爬树机构的机身上,用于对果实进行采摘;感知与主控模块安装在爬树机构和采摘机构上,用于对整个果实采摘机器人进行控制。与现有技术相比,本发明可以完成爬树、棕榈果检测与识别、砍伐棕榈叶、采摘棕榈果和收集果实等工作,以替代人工劳动,降低工人工作强度,提升采摘工作的效率。技术研发人员:祖莉,蔡灏楠,张健,夏陈鹏,杨阳,叶舒融,李运受保护的技术使用者:南京理工大学技术研发日:技术公布日:2024/12/23本文地址:https://www.jishuxx.com/zhuanli/20241226/343569.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表