一种电动无人驾驶插秧机
- 国知局
- 2024-12-06 12:47:29
本发明属于新能源农业机械和无人驾驶,尤其涉及一种电动无人驾驶插秧机。
背景技术:
1、当前,插秧机多以柴油机为动力,如何节约能源并降低环境污染成为当前农业机械化可持续发展的关键问题。
2、目前,水稻种植主要依靠人工和较为传统的机械插秧,人工种植水稻投入较大,并且插秧质量和效率也难以保证,存在踩踏浪费秧苗的情况;传统的乘坐式插秧机,插秧质量取决于插秧机驾驶员的驾驶水平,驾驶员疲劳或者注意力不集中时,会出现直线度低、漏插和重插等问题,会使得后期不好管理,最终导致水稻产量降低。
3、电动插秧机的能量以电能形式传递,大大简化了传动机构,使整机质量减轻,损耗和排放减少,而且电动机调速性能强,增强了插秧机的操控性;同时还具备电动机械的一般优点,如噪音小、无废气污染和不消耗二次能源等 。因此,我们结合新能源和无人智驾的优势,提出一种电动无人驾驶插秧机,来提高插秧效率和质量。
技术实现思路
1、本发明的目的是提供一种电动无人驾驶插秧机,以解决上述问题。
2、为实现上述目的,本发明提供了如下方案:
3、一种电动无人驾驶插秧机,包括主机架,通过牵引支架安装在所述主机架的尾端的插秧系统,转动设置在所述主机架行进方向前端的前驱动轮、转动设置在所述主机架行进方向尾端的后驱动轮和用作动力源的牵引电机,
4、所述牵引电机的固定端固接在所述主机架上,所述牵引电机的输出轴连接有行星齿轮组件的输入端;所述行星齿轮组件与所述前驱动轮、所述后驱动轮和所述插秧系统传动连接;
5、还包括无人自动驾驶系统,用于驱动所述牵引电机运行以及用于驱动所述前驱动轮实现所述主机架转向。
6、优选的,所述行星齿轮组件包括行星齿轮和外壳,所述外壳固接在所述主机架上,所述行星齿轮转动设置在所述外壳内;
7、所述行星齿轮的太阳轮的输入轴与所述牵引电机的输出轴轴接;
8、所述行星齿轮的行星架轴接有第一锥齿轮,所述第一锥齿轮与所述前驱动轮传动连接;
9、所述行星齿轮的齿圈轴接有第一传动齿轮,所述第一传动齿轮通过齿轮传动连接有输出轴的一端,所述输出轴的另一端与所述后驱动轮和所述插秧系统传动连接。
10、优选的,两个所述前驱动轮之间设有前轮驱动轴,所述前轮驱动轴的端部通过万向节与相对应的所述前驱动轮连接;
11、所述前轮驱动轴中部连接有第一差速器,所述第一差速器的输入端与所述第一锥齿轮啮合。
12、优选的,两个所述后驱动轮之间设有后轮驱动轴,所述后轮驱动轴的端部与相对应的所述后驱动轮轴接;
13、所述后轮驱动轴中部连接有第二差速器,所述第二差速器的输入端啮合有第二锥齿轮,所述第二锥齿轮轴接在所述输出轴的中部。
14、优选的,所述输出轴远离所述第一传动齿轮的一端轴接有第二传动齿轮,所述第二传动齿轮啮合有第三传动齿轮,所述第三传动齿轮通过齿轮配合传动有传动轴,所述传动轴与所述插秧系统传动连接。
15、优选的,所述插秧系统中的移箱机构采用四轴移箱机构,所述螺旋轴转动带动移箱传动件推动所述移箱轴进行横向移箱送秧,其上的主动凸轮拨动所述送秧轴上的从动凸轮,使所述送秧轴旋转作纵向送秧。
16、优选的,所述无人自动驾驶系统包括电性连接的车载显示器、电动方向盘、车身姿态传感器和gnss卫星天线,所述车载显示器和所述电动方向盘通过驾驶操控台安装在所述主机架上;
17、所述车身姿态传感器和所述gnss卫星天线固接在所述主机架上;
18、所述驾驶操控台通过电机驱动部与所述牵引电机电性连接;
19、所述电动方向盘与所述前驱动轮的转向轴连接。
20、优选的,所述电机驱动部包括动力电池,所述动力电池与所述牵引电机电性连接,所述牵引电机电性连接有电机驱动控制器和电子油门,所述电机驱动控制器和所述电子油门与所述驾驶操控台电性连接。
21、优选的,所述主机架上固接有座椅。
22、优选的,所述主机架上固接有储秧架。
23、与现有技术相比,本发明具有如下优点和技术效果:
24、使用时,通过无人自动驾驶系统控制牵引电机运行,使得其在行星齿轮组件作用下同时带动前驱动轮、后驱动轮和插秧系统运行,使主机架移动,并由无人自动驾驶系统控制前驱动轮转向,使主机架可以调整行进方向,通过行星齿轮组件将牵引电机的动力同时输入至前驱动轮、后驱动轮和插秧系统,在行星齿轮组件作用下可以自动协调前驱动轮和后驱动轮的转速以及插秧系统的插秧速度,使得插秧速度和行进速度相匹配,电动无人驾驶可实现自动调头、田块规划和路径设定等功能,且作业精度高,可用于替代人工,实现自动化、智能化、高效率、高质量作业。
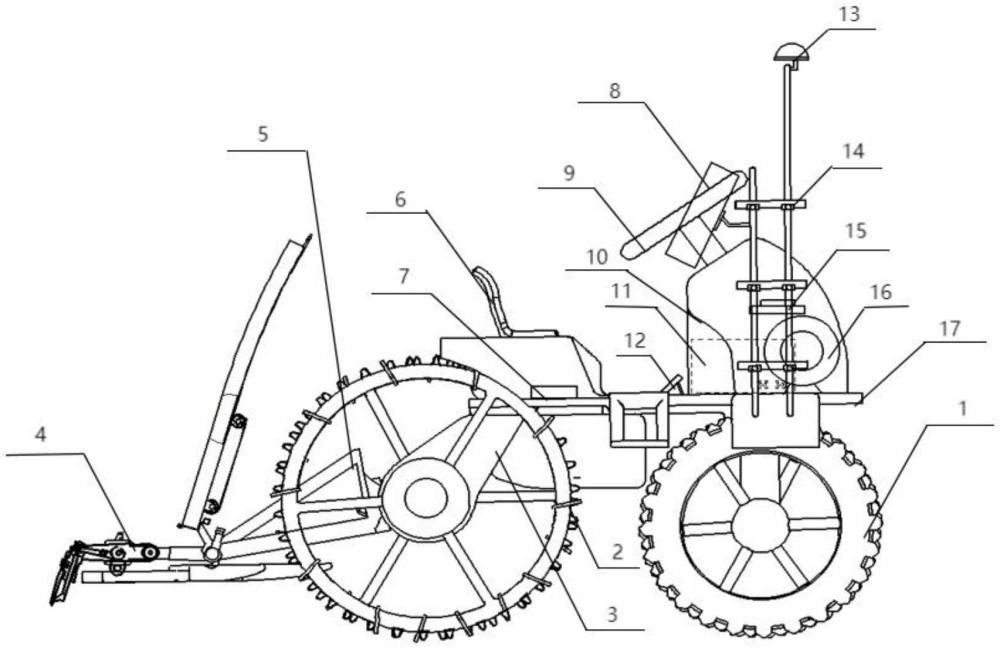
技术特征:1.一种电动无人驾驶插秧机,包括主机架(17),通过牵引支架(5)安装在所述主机架(17)的尾端的插秧系统,转动设置在所述主机架(17)行进方向前端的前驱动轮(1)、转动设置在所述主机架(17)行进方向尾端的后驱动轮(2)和用作动力源的牵引电机(16),其特征在于:
2.根据权利要求1所述的一种电动无人驾驶插秧机,其特征在于:
3.根据权利要求2所述的一种电动无人驾驶插秧机,其特征在于:两个所述前驱动轮(1)之间设有前轮驱动轴(22),所述前轮驱动轴(22)的端部通过万向节与相对应的所述前驱动轮(1)连接;
4.根据权利要求2所述的一种电动无人驾驶插秧机,其特征在于:两个所述后驱动轮(2)之间设有后轮驱动轴(29),所述后轮驱动轴(29)的端部与相对应的所述后驱动轮(2)轴接;
5.根据权利要求2所述的一种电动无人驾驶插秧机,其特征在于:所述输出轴(28)远离所述第一传动齿轮(25)的一端轴接有第二传动齿轮(27),所述第二传动齿轮(27)啮合有第三传动齿轮(32),所述第三传动齿轮(32)通过齿轮配合传动有传动轴(35),所述传动轴(35)与所述插秧系统传动连接。
6.根据权利要求2所述的一种电动无人驾驶插秧机,其特征在于:所述无人自动驾驶系统包括电性连接的车载显示器(8)、电动方向盘(9)、车身姿态传感器(7)和gnss卫星天线(13),所述车载显示器(8)和所述电动方向盘(9)通过驾驶操控台(10)安装在所述主机架(17)上;
7.根据权利要求6所述的一种电动无人驾驶插秧机,其特征在于:所述电机驱动部包括动力电池(11),所述动力电池(11)与所述牵引电机(16)电性连接,所述牵引电机(16)电性连接有电机驱动控制器(15)和电子油门(12),所述电机驱动控制器(15)和所述电子油门(12)与所述驾驶操控台(10)电性连接。
8.根据权利要求1所述的一种电动无人驾驶插秧机,其特征在于:所述主机架(17)上固接有座椅(6)。
9.根据权利要求1所述的一种电动无人驾驶插秧机,其特征在于:所述主机架(17)上固接有储秧架(14)。
技术总结本发明属于新能源农业机械和无人驾驶技术领域,尤其涉及一种电动无人驾驶插秧机,包括:主机架,通过牵引支架安装在主机架的尾端的插秧系统,转动设置在主机架行进方向前端的前驱动轮、转动设置在主机架行进方向尾端的后驱动轮和用作动力源的牵引电机,牵引电机的固定端固接在主机架上,牵引电机的输出轴连接有行星齿轮组件的输入端;行星齿轮组件与前驱动轮、后驱动轮和插秧系统传动连接;还包括无人自动驾驶系统,用于驱动牵引电机运行以及用于驱动前驱动轮实现主机架转向。本装置可实现自动调头、田块规划和路径设定等功能,且作业精度高,可用于替代人工,实现自动化、智能化、高效率、高质量作业。技术研发人员:高辉松,周仲曦,薛金林,周永清,王凯,洪俊奇受保护的技术使用者:南京农业大学技术研发日:技术公布日:2024/12/2本文地址:https://www.jishuxx.com/zhuanli/20241204/342784.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。