一种基于机器视觉的智能移栽系统的制作方法
- 国知局
- 2024-12-06 12:54:32
本发明涉及移栽领域,具体涉及一种基于机器视觉的智能移栽系统。
背景技术:
1、根段用于繁殖的中药材包括柴胡、丹参等,在柴胡的种植过程中,选择健康的根段进行栽种,能长出新的柴胡植株。柴胡作为常用中药材,市场需求量较大,根段繁殖是其扩大种植的一种有效方式。丹参也可以利用根段繁殖。丹参根段在合适的土壤、气候等条件下,能够生根发芽,发育成完整的丹参植株。
2、在进行丹参根段种植时,先将选好的根条切成5-6厘米长的根段,在准备好的栽植地上按行株距(30-40)厘米×(25-30)厘米,开深3-5厘米的穴,每穴施入适量的土杂肥,或浇施人畜粪水,然后将根段直立栽种,大头朝上,小头朝下,不可倒置,否则不发芽。有的种植中,需要将丹参根段水平放置进行栽种。
3、现有的移栽装置主要依靠人工对丹参根段进行放置,放置好后,通过旋转轮和伸缩杆将根段定向栽种。然而该方法需要消耗较大的人力,并且在种植时,容易出错导致丹参不发芽。
4、另外,现有的移栽装置在栽种的过程中,但是对于大头朝上,小头朝下的丹参根段,大头朝上的丹参根段在下落的过程中,在重力作用下,容易发生掉转,在下落过程中变成大头朝下,小头朝上,进而影响栽种。并且,有的丹参栽种时,采用水平放置进行栽种,现有的栽种装置只能适用于一种方向的栽种,使用范围具有局限性。
技术实现思路
1、本发明的一个目的在于提供一种基于机器视觉的智能移栽系统,通过传送模块将特定方向的根段传送到种植模块处,并通过种植模块将根段水平或竖直种植到种植处,本系统能够适用于不同方向的根段种植,确保种植方向的正确性,提高使用效率。
2、该目的采用以下技术方案实现:
3、一种基于机器视觉的智能移栽系统,包括传送模块和种植模块,传送模块用于将根段传送到种植模块。种植模块用于将根段种植到种植处中,并且在种植过程中,可以根据需要将根段水平或竖直种植到种植处。
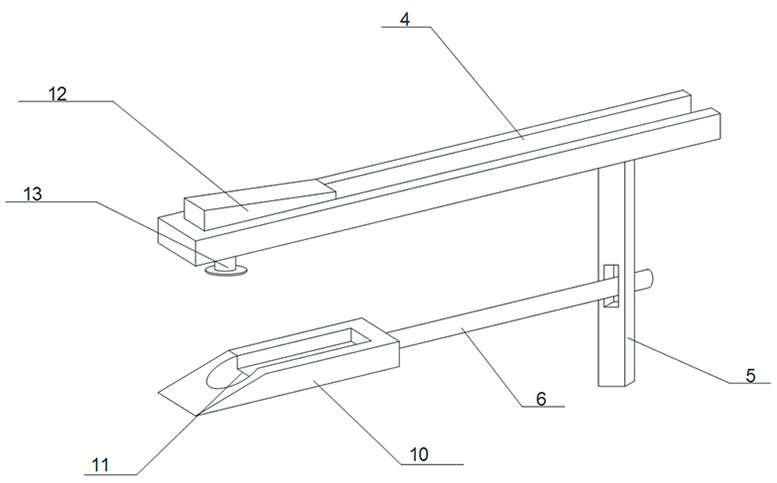
4、在本系统中,种植模块包括第一连接板,第一连接板的下端连接有第一伸缩杆,第一伸缩杆上连接有第二伸缩杆,第二伸缩杆的一端连接有第二连接板。第一伸缩杆与第二伸缩杆之间设置有第一调节件,第一调节件使第二伸缩杆在第一伸缩杆上旋转;第一调节件使第二伸缩杆在第一连接板和第一伸缩杆所在平面上旋转,当第二连接板上设置有放置槽,第一连接板上设置有传递槽,第一调节件带动第二伸缩杆旋转,使放置槽与传递槽相互接触时,根段通过第一连接板上的传递槽进入第二伸缩杆上的放置槽中;
5、当根段竖直种植时,第一调节件带动第二伸缩杆旋转到水平位置处,第一伸缩杆伸缩使第二连接板与种植处之间的距离为第一预设距离,第一调节件带动第二伸缩杆旋转第一预设角度,使第二连接板的一端与种植处接触,根段从放置槽中进入种植处;
6、当根段水平种植时,第一调节件带动第二伸缩杆旋转到水平位置处,第一伸缩杆伸缩使第二连接板位于种植处内,第二调节件使第二连接板在第二伸缩杆上周向旋转,使根段水平位于种植处。
7、与现有的移栽系统相比,本系统能够根据需要调节根段进入的角度和方向,适用于不同的中药根段的种植,适用范围更广。
8、大头朝上,小头朝下,不可倒置的丹参根段的种植,现有的移栽系统在种植的过程中,根段在大头朝上、小头朝下的落下的过程中,在重力作用下容易发生大头朝下的改变,影响种植。
9、对于此,本系统在进行竖直种植时,第二连接板与种植处之间的距离为第一预设距离,第一调节件带动第二伸缩杆旋转第一预设角度,使第二连接板的一端与种植处接触,接触时,根段从放置槽中进入种植处。其中,第一预设角度小于30度,优选的为15度或20度,旋转过程中,根段位于放置槽内,直到第二连接板的一端与种植处接触时,根段从放置槽中进入种植处,确保根段的方向不会发生改变。
10、进一步的,传递槽处设置有挡块,挡块的下端设置有作用块,挡块能够在传递槽处上下移动,使传递槽打开或关闭;当挡块位于传递槽上,挡块遮挡传递槽,根段不能从传递槽中漏出。当第二连接板在第一调节件的作用下使其向上旋转时,第二连接板作用在作用块上,带动作用块向上移动,传递槽打开,传递槽与放置槽相互接触,根段从传递槽落入放置槽中,第二连接板在第一调节件的作用下使其向下旋转到水平,避免根段滑落,最后到种植处时,第二连接板在第一调节件的作用下进一步的向下旋转,使根段位于种植处,完成竖直方向的种植。
11、本系统中,第一预设距离小于10cm,旋转后能进一步的确保第一预设角度较小,使根段位于种植处内,且落下方向不改变。
12、更进一步的,传送模块包括第一传送组件,第一传送组件包括第一传送板,第一传送板上设置有第一传送槽,第一传送槽上设置有放置盘,放置盘的下端设置放置块,放置块位于第一传送槽内,且能够沿第一传送槽滑动,根段位于放置盘上;第一传送板上设置有机器视觉模块和姿态调整模块,机器视觉模块包括摄像头,通过摄像头获取放置盘上的根段的图像信息,并将根段的图像信息发送给姿态调整模块;姿态调整模块包括机械爪,姿态调整模块根据预设的根段种植方向和根段的图像信息,使机械爪带动放置盘旋转。
13、本系统,在将根段传送到种植模块中时,通过机器视觉模块和姿态调整模块使根段位于合适的位置上,与到达种植处的位置关系相互匹配。
14、其中,机器视觉模块中的摄像头获取放置盘上的根段的图像信息,运用图像处理和识别算法,分析中药材根段的形态、大小、颜色等特征,提取中药材根段长短、粗细等特征,并得到旋转放置盘的指令。姿态调整模块根据旋转放置盘的指令,使机械爪带动放置盘旋转,并旋转到匹配的位置。具体的,放置盘的侧面设置有第一齿轮,放置盘的侧面设置有与第一齿轮相互啮合的第二齿轮,机械爪能够作用在第一齿轮上,使第一齿轮旋转,第一齿轮旋转带动放置盘旋转。通过这样的设置,能够快速便捷的调节放置盘。
15、另一方面,传送模块还包括第二传送组件,第二传送组件包括为圆形的第二传送板,第二传送板上设置有若干第二传送槽,第二传送槽在第二传送板的侧面开口,放置块滑入第二传送槽内时,放置盘位于第二传送槽上方。圆形的第二传送板可以同时放置多个放置盘,提高传送效率,避免在第一传送槽上堆积过多的放置盘,影响对每个放置盘的图像获取和位置调节。
16、另一方面,传送模块包括第三传送组件,第三传送组件包括第三传送板,第三传送板从上到下依次包括第三传送槽、第一分离槽和第二分离槽,第一分离槽和第二分离槽连通,且第二分离槽在第三传送板的下端开口,第三传送槽、第一分离槽和第二分离槽分别用于放置根段、放置盘和放置块。第三传送板的一端与第一连接板连接,第一连接板上的传递槽与第三传送板上的第三传送槽连通。
17、优选的,第二传送板上设置有旋转部,旋转部内包括一个第二传送槽,旋转部旋转使旋转部与第一连接板平行。
18、在传递的过程中,到达第三传送板时,放置盘进入第一分离槽,放置块进入第二分离槽,根段滑入第三传送槽中,且根段在第三传送槽中的方向不会发生改变,根段在第三传送槽中单向进行传送。
19、优选的,第一传送槽内设置有移动杆,移动杆的一端与第一传送槽连接,移动杆的另一端与放置块连接,移动杆通过伸缩带动放置块在第一传送槽内移动。移动杆伸缩的过程中能够快速的将放置块移动到第二传送槽中,提高传送效率。
20、本发明与现有技术相比,具有如下的优点和有益效果:
21、本发明一种基于机器视觉的智能移栽系统,本系统能够根据需要将根段进行水平或竖直种植,对于竖直种植的根段,在种植过程中,不会发生倒转,确保种植效率,且提高使用范围,对于不同的中药根段种植都能适用。
22、本系统的根段在种植过程中,通过放置槽将根段放入种植处中,确保根段在下落过程中不会发生方向改变。
本文地址:https://www.jishuxx.com/zhuanli/20241204/343012.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表