一种小型化旋转式机电作动器的制作方法
- 国知局
- 2025-01-10 13:23:09
本申请属于航天伺服领域,特别是飞行器空气舵摆角位置控制伺服系统的机电作动器领域,涉及一种小型化旋转式机电作动器。
背景技术:
1、机电作动器作动器是空气动力控制系统的执行机构,它根据控制系统的摆角输入指令,进行功率放放大,并且准确、迅速和稳定的控制空气舵面摆角达到预定位置,完成空气动力控制,使飞行器按照需求姿态稳定飞行。机电作动器按照输出形式,可分为直线式作动器和旋转式作动器两类。
2、北京航空航天大学cn1562704a专利公开了一种飞机机翼旋转或折叠作动器,作动器包括作动筒、活塞杆、转接接头、锁定机构等,能够使飞机机翼在飞行状态下保持稳定,而在地面或停泊状态下旋转或者折叠,以减小占地面积,提高机场的使用效率和飞机的存储能力。
3、珠海隆华直升机科技有限公司cn109693782a专利公开了一种直升机旋转式舵机及直升机,包括动力源及减速输出组件。产品结构紧凑。体积小巧,安装和拆卸方便。
4、传统的旋转式机电作动器,多采用伺服电机输出动力,传动机构采用滚珠丝杠副结合拨叉式结构的方案,完成输出轴的角位移输出。上述方案存在伺服机构体积较大,同时,高速运动条件下,存在滚子与拨叉之间的滚动摩擦变为滑动摩擦现象,传动效率较低。
技术实现思路
1、本申请解决的技术问题是:克服现有技术的不足,提供了一种小型化旋转式机电作动器,采用永磁同步电机与齿轮传动轴系的组合传动,提高旋转式舵机的传动效率,克服拨叉式机构高速运动条件下的滑动摩擦弊端。传动齿轮箱第一级采用弧齿锥齿轮传动,第二级直到第六级采用直齿轮传动。同时,为提高旋转式机电作动器的定位精度,在舵机输出轴侧配置旋转变压器,检测转子实时位置。
2、本申请提供的技术方案如下:
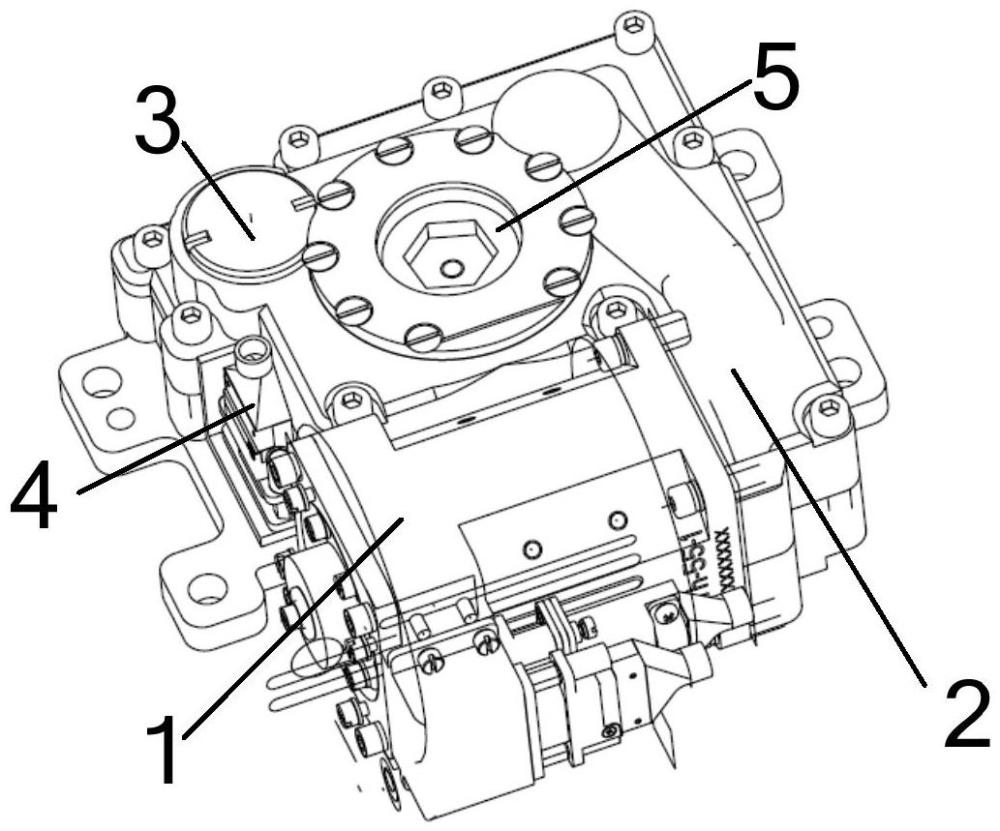
3、一种小型化旋转式机电作动器,包括永磁同步电机、齿轮减速箱和输出舵轴,永磁同步电机固定连接于齿轮减速箱,永磁同步电机的输出轴伸入齿轮减速箱内,永磁同步电机的输出轴通过减速齿轮轴系将扭矩传递给输出舵轴,输出舵轴用于连接舵机输出主轴,舵机输出主轴转动连接于齿轮减速箱,舵机输出主轴的轴线垂直于永磁同步电机的输出轴轴线;齿轮减速箱包括箱体和减速齿轮轴系,减速齿轮轴系包括转动连接于箱体的第一级弧齿锥齿轮和多个直齿轮,第一级弧齿锥齿轮和多个直齿轮的轴线平行于舵机输出主轴的轴线,舵机输出主轴同轴连接有第六级直齿轮,永磁同步电机的输出轴同轴连接有输出锥齿轮,第一级弧齿锥齿轮包括沿自身轴线方向分布的且同步转动的锥齿部和第一小齿轮,锥齿部与输出锥齿轮啮合,第一小齿轮与第六级直齿轮通过多个直齿轮啮合。
4、所述多个直齿轮包括第二级直齿轮、第三级直齿轮、第四级直齿轮和第五级直齿轮,第二级直齿轮包括沿自身轴线方向分布的且同步转动的第二大齿轮和第二小齿轮,第三级直齿轮包括沿自身轴线方向分布的且同步转动的第三大齿轮和第三小齿轮,第四级直齿轮包括沿自身轴线方向分布的且同步转动的第四大齿轮和第四小齿轮,第五级直齿轮包括沿自身轴线方向分布的且同步转动的第五大齿轮和第五小齿轮,第二大齿轮与第一小齿轮啮合,第二小齿轮位于第二大齿轮朝向锥齿部的一侧,第三大齿轮与第二小齿轮啮合,第三小齿轮位于第三大齿轮背离第二大齿轮的一侧,第四大齿轮与第三小齿轮啮合,第四小齿轮位于第四大齿轮朝向第三大齿轮的一侧,第五大齿轮与第四小齿轮啮合,第五小齿轮位于第五大齿轮朝向第四大齿轮的一侧,第六级直齿轮与第五小齿轮啮合。
5、所述第一级弧齿锥齿轮和多级直齿轮的轴线在舵机输出主轴外侧周向上依次分布,形成包覆式分布。
6、所述箱体还连接有角位移传感器,舵机输出主轴连接有扇形齿轮,角位移传感器的角位移传感器输出轴连接有啮合齿轮,扇形齿轮与啮合齿轮啮合,通过扇形齿轮和啮合齿轮将舵机输出主轴的摆角传递给角位移传感器输出轴。
7、所述箱体还连接有旋转变压器,角位移传感器输出轴与旋转变压器的转子轴紧固。
8、所述扇形齿轮位于第六级直齿轮朝向第五大齿轮的一侧。
9、一种用于空气动力控制的旋转式机电作动器,包括永磁同步电机,设置于齿轮箱壳体内的传动齿轮轴系组件,旋转变压器,输出轴预紧碟簧;传动齿轮轴系组件包括第一级弧齿锥齿轮传动,第二级直齿轮传动,第三级直齿轮传动,第四级直齿轮传动,第五级直齿轮传动,第六级直齿轮传动以及旋转变压器传动轴系组成。
10、本发明与现有技术相比至少包含如下有益效果:
11、(1)本发明采用永磁同步电机+齿轮箱的传动方案,将伺服电机转子的旋转运动,经过减速增距后,传递给舵机输出主轴,驱动空气舵面转动。舵机输出主轴与电机输出轴法向安装。旋转式机电作动器整机传动效率达到81%。
12、(2)本发明机电作动器的摆动角度可达±32度。机构外形尺寸包络为152mm×133mm×70mm,总体积小,总重量仅有2.5kg,同时能够承受200n·m的负载力矩,在轻质小型化的同时具有高承载力。
13、(3)本发明机电作动器在舵机输出主轴端,采用与扇形齿轮同轴安装的旋转变压器采集空气舵主轴角位移,通过位置闭环控制消除伺服电机输出端到空气舵主轴传动齿轮之间的传动间隙,实现舵轴摆角的高精度控制。
技术特征:1.一种小型化旋转式机电作动器,其特征在于:包括永磁同步电机(1)、齿轮减速箱(2)和输出舵轴(5),永磁同步电机(1)固定连接于齿轮减速箱(2),永磁同步电机(1)的输出轴伸入齿轮减速箱(2)内,永磁同步电机(1)的输出轴通过减速齿轮轴系将扭矩传递给输出舵轴(5),输出舵轴(5)用于连接舵机输出主轴(16),舵机输出主轴转动连接于齿轮减速箱(2),舵机输出主轴的轴线垂直于永磁同步电机(1)的输出轴轴线;齿轮减速箱(2)包括箱体和减速齿轮轴系,减速齿轮轴系包括转动连接于箱体的第一级弧齿锥齿轮(6)和多个直齿轮,第一级弧齿锥齿轮(6)和多个直齿轮的轴线平行于舵机输出主轴的轴线,舵机输出主轴同轴连接有第六级直齿轮(161),永磁同步电机(1)的输出轴同轴连接有输出锥齿轮,第一级弧齿锥齿轮(6)包括沿自身轴线方向分布的且同步转动的锥齿部和第一小齿轮,锥齿部与输出锥齿轮啮合,第一小齿轮与第六级直齿轮(161)通过多个直齿轮啮合。
2.根据权利要求1所述的一种小型化旋转式机电作动器,其特征在于:所述多个直齿轮包括第二级直齿轮(7)、第三级直齿轮(8)、第四级直齿轮(9)和第五级直齿轮(10),第二级直齿轮(7)包括沿自身轴线方向分布的且同步转动的第二大齿轮和第二小齿轮,第三级直齿轮(8)包括沿自身轴线方向分布的且同步转动的第三大齿轮和第三小齿轮,第四级直齿轮(9)包括沿自身轴线方向分布的且同步转动的第四大齿轮和第四小齿轮,第五级直齿轮(10)包括沿自身轴线方向分布的且同步转动的第五大齿轮和第五小齿轮,第二大齿轮与第一小齿轮啮合,第二小齿轮位于第二大齿轮朝向锥齿部的一侧,第三大齿轮与第二小齿轮啮合,第三小齿轮位于第三大齿轮背离第二大齿轮的一侧,第四大齿轮与第三小齿轮啮合,第四小齿轮位于第四大齿轮朝向第三大齿轮的一侧,第五大齿轮与第四小齿轮啮合,第五小齿轮位于第五大齿轮朝向第四大齿轮的一侧,第六级直齿轮(161)与第五小齿轮啮合。
3.根据权利要求1所述的一种小型化旋转式机电作动器,其特征在于:所述第一级弧齿锥齿轮(6)和多级直齿轮的轴线在舵机输出主轴外侧周向上依次分布,形成包覆式分布。
4.根据权利要求1或2所述的一种小型化旋转式机电作动器,其特征在于:所述箱体还连接有角位移传感器,舵机输出主轴连接有扇形齿轮(14),角位移传感器的角位移传感器输出轴(17)连接有啮合齿轮(15),扇形齿轮(14)与啮合齿轮(15)啮合,通过扇形齿轮(14)和啮合齿轮(15)将舵机输出主轴(16)的摆角传递给角位移传感器输出轴(17)。
5.根据权利要求4所述的一种小型化旋转式机电作动器,其特征在于:所述箱体还连接有旋转变压器(3),角位移传感器输出轴(17)与旋转变压器(3)的转子轴紧固。
6.根据权利要求4所述的一种小型化旋转式机电作动器,其特征在于:所述扇形齿轮(14)位于第六级直齿轮(161)朝向第五大齿轮的一侧。
7.根据权利要求1所述的一种小型化旋转式机电作动器,其特征在于:所述输出舵轴(5)的负载摆角为±32度。
8.根据权利要求1所述的一种小型化旋转式机电作动器,其特征在于:电作动器的外形尺寸包络为152mm×133mm×70mm,齿轮箱减速比152,总重量为2.5kg。
技术总结一种小型化旋转式机电作动器,涉及航天伺服领域,包括永磁同步电机、齿轮减速箱和输出舵轴,永磁同步电机连接于齿轮减速箱且其输出轴伸入齿轮减速箱内,输出舵轴连接舵机输出主轴,舵机输出主轴转动连接于齿轮减速箱,齿轮减速箱包括箱体和减速齿轮轴系,减速齿轮轴系包括转动连接于箱体的第一级弧齿锥齿轮和多个直齿轮,第一级弧齿锥齿轮和多个直齿轮的轴线平行于舵机输出主轴的轴线,舵机输出主轴同轴连接第六级直齿轮,永磁同步电机的输出轴同轴连接有输出锥齿轮,第一级弧齿锥齿轮包括沿自身轴线方向分布的且同步转动的锥齿部和第一小齿轮,锥齿部与输出锥齿轮啮合,第一小齿轮与第六级直齿轮通过多个直齿轮啮合。提高旋转式舵机的传动效率。技术研发人员:刘春庆,宁振雷,王贺龙,张令程,李鸿渐,李彧受保护的技术使用者:北京精密机电控制设备研究所技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/352801.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表