装箱装置、空调外机装箱系统及装箱方法与流程
- 国知局
- 2025-01-10 13:23:33
本技术涉及打包,特别是涉及一种装箱装置、空调外机装箱系统及装箱方法。
背景技术:
1、在空调外机的打包过程中,需要在空调外机的外侧套装包装箱,从而便于搬运,防止运输过程中的刮伤及配套附件掉落。但相关技术中,多采用人工套箱作业,不仅劳动强度大,而且生产效率低。
技术实现思路
1、基于此,有必要针对人工套箱作业劳动强度大、效率低的问题,提供一种装箱装置、空调外机装箱系统及装箱方法。
2、为实现上述目的,本技术采用的技术方案如下:
3、第一方面,本技术实施例提供了一种装箱装置,用于在待打包物料的外侧套装包装箱,所述装箱装置包括:
4、套箱组件,其包括机器人和安装于所述机器人上的开箱夹具,所述开箱夹具用于抓取并打开包装箱;
5、第一定位组件,其包括第一探测件并用于定位限制所述待打包物料,所述第一探测件用于获取所述待打包物料的定位信息;
6、控制组件,其分别与所述套箱组件和所述第一定位组件电连接;
7、其中,所述控制组件获取所述第一探测件的定位信息,并在所述待打包物料定位完成后向所述套箱组件发送套箱指令,所述机器人控制所述开箱夹具到达套箱工位,所述开箱夹具打开所述包装箱并套装于所述待打包物料的外侧。
8、通过上述设计,实现所述包装箱的自动套装,减少人工成本,提升作业效率。
9、在第一方面的其中一个实施例中,所述开箱夹具包括相对设置的两个安装板、多个第一吸附件和相对设置的两个拍板,各所述第一吸附件分别安装于两个所述安装板上,两个所述拍板分别转动安装于对应的一个所述安装板上,且分别位于两个安装板相互远离的两侧。
10、通过上述设计,所述拍板在翻转过程中,对所述包装箱进行挤压拍打,所述包装箱的两个侧面沿着折叠线撑起,所述包装箱在两个拍板的限制下保持打开状态。
11、在第一方面的其中一个实施例中,所述开箱夹具还包括主体,至少一个所述安装板滑动设置于所述主体。
12、通过上述设计,用户可根据不通过空调外机型号,选择相应尺寸的所述包装箱,在装箱过程中,相应调整两个所述拍板的间距,满足不同大小所述包装箱的开箱作业。
13、在第一方面的其中一个实施例中,所述开箱夹具还包括对应设置的上升气缸、拉伸气缸和钩爪,每个所述安装板均安装有一个所述上升气缸,所述拉伸气缸安装于所述上升气缸的伸缩端,所述钩爪安装于所述拉伸气缸的伸缩端。
14、通过上述设计,所述控制组件驱动上升气缸向下移动,使所述钩爪扣住所述包装箱的底侧。同时,所述拉伸气缸可驱动所述钩爪进行前后移动,从而所述驱动钩爪进一步拉开所述包装箱,保障后续的套箱工作中,空调外机可顺利进入所述包装箱内。
15、在第一方面的其中一个实施例中,所述第一定位组件包括支架、前阻挡机构、左右定位机构和后推机构,所述前阻挡机构、所述左右定位机构和所述后推机构均安装于所述支架,所述前阻挡机构能够沿第一方向伸缩移动,所述左右定位机构能够沿所述第一方向和第二方向往返运动,所述后推机构能够沿所述第一方向和第三方向往返运动,所述第一方向、所述第二方向和所述第三方向中的任两个相互垂直。
16、通过上述设计,所述阻挡机构、所述左右定位机构和所述后推机构对空调外机的四个侧面进行限位,使空调外机限制于套箱工位,便于后续的套箱作业。
17、在第一方面的其中一个实施例中,所述第一定位组件还包括后阻挡机构,所述后阻挡机构相对设置于所述支架远离所述前阻挡机构的一端并能够沿所述第一方向伸缩移动。
18、通过上述设计,在一个空调外机进入所述第一定位组件后,所述后阻挡机构的阻挡后续空调外机的进入,保障空调外机的套箱作业有序进行。
19、在第一方面的其中一个实施例中,所述装箱装置还包括第二定位组件,所述第二定位组件包括支撑台、多个第二探测件和调整机构,各所述第二探测件分别安装于所述支撑台的台面不同位置,以获取所述包装箱的定位信息,所述调整机构安装于所述支撑台的一侧,并根据所述包装箱的定位信息,对所述包装箱进行定位调整,所述套箱组件在所述包装箱定位完成后夹取所述包装箱。
20、通过上述设计,当所述包装箱未达到定位状态,所述控制组件驱动所述调整机构,对所述包装箱进行推动,完成相应的所述包装箱定位作业。
21、在第一方面的其中一个实施例中,所述装箱装置还包括上料输送组件和缓存输送组件,所述上料输送组件设置于所述第二定位组件的一侧,以将所述包装箱输送至所述第二定位组件,所述缓存输送组件设置于所述上料输送组件的输入端并缓存有所述包装箱。
22、通过上述设计,在所述上料输送装置上的所述包装箱被输送至所述第二定位组件后,所述缓存输送组件上的所述包装箱可输送至所述上料输送装置,保持所述包装箱的上料节奏,提升整体作业效率。
23、在第一方面的其中一个实施例中,所述缓存输送组件包括推料机构,所述推料机构用于将所述包装箱推送至所述上料输送组件。
24、通过上述设计,当所述上料输送组件的所述包装箱被输送至所述第二定位组件后,所述推料机构推动所述包装箱推入所述上料输送组件。
25、在第一方面的其中一个实施例中,所述装箱装置还包括上料组件,所述上料组件包括门架和滑动安装于所述门架的取料夹具,所述取料夹具设有两个取料部,各所述取料部均用于吸取所述包装箱,并将所述包装箱分别放置于所述上料输送组件和所述缓存输送组件。
26、通过上述设计,两个所述吸取部可同时吸取所述包装箱后,将两个所述包装箱分别放置于所述上料输送组件和所述缓存输送组件,保障上料节奏,提升生产效率。
27、第二方面,本技术实施例还提供了一种空调外机装箱系统,包括上述任一实施例中所述的装箱装置。
28、通过上述设计,实现空调外机的自动装箱作业,减少人工成本,提升生产效率。
29、第三方面,本技术实施例还提供了一种装箱方法,采用上述任一实施例中所述的装箱装置或空调外机装箱系统,所述装箱方法包括:
30、根据所述待打包物料的型号,选择相应的装箱参数;
31、夹取两个所述包装箱,分别放置于上料输送组件和缓存输送组件;
32、位于所述上料输送组件上的所述包装箱经所述上料输送组件输送至第二定位组件,位于所述缓存输送组件上的所述包装箱经推料机构推送至所述上料输送组件;
33、所述套箱组件抓取并打开位于所述第二定位组件上的所述包装箱;
34、所述第一定位组件对所述待打包物料进行定位固定,所述控制组件驱动所述套箱组件进行套箱作业。
35、通过上述设计,实现空调外机的自动装箱作业,保持装箱频率,空调外机的装箱循环作业。
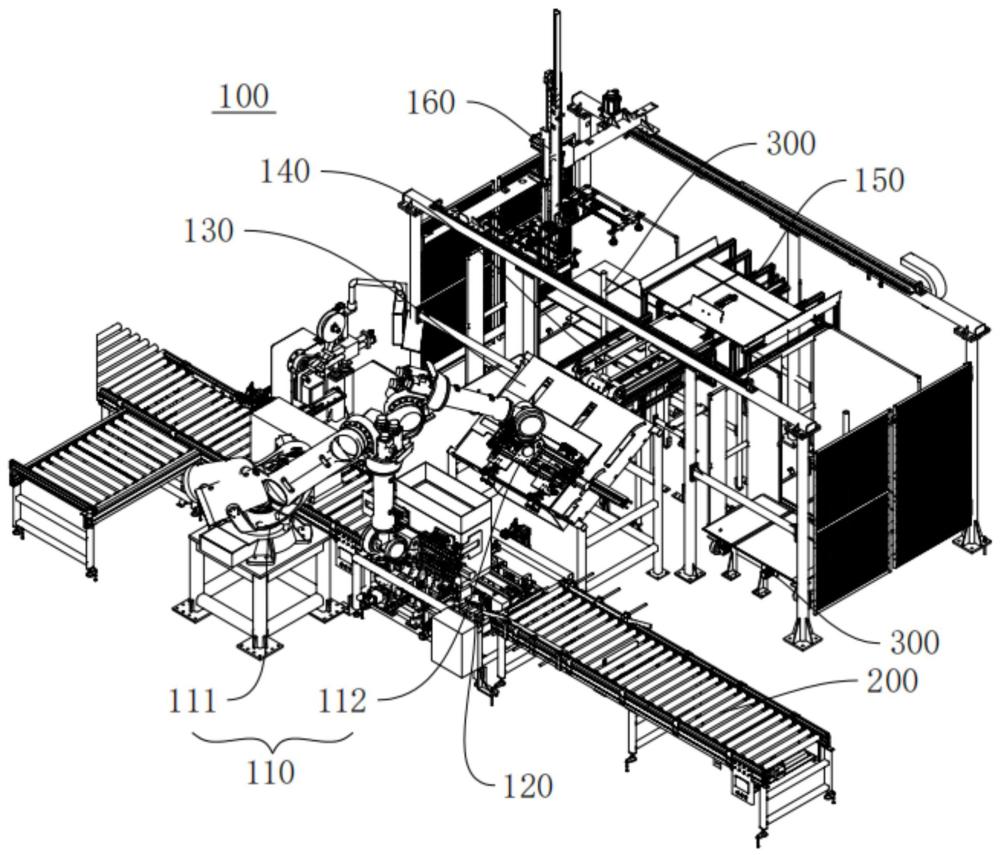
36、相对于相关技术,本技术的有益效果是:本技术提供了一种装箱装置、空调外机装箱系统及装箱方法,可用于各类产品的套箱打包。装箱装置包括套箱组件、第一定位组件和控制组件。其中,套箱组件包括机器人和安装于机器人上的开箱夹具,以通过开箱夹具抓取并打开包装箱。第一定位组件包括第一探测件并用于定位限制待打包物料。控制组件分别与套箱组件和第一定位组件电连接,以发送相应的控制作业指令。如此一来,在装箱过程中,控制组件驱动机器人调整夹取位置,并控制开箱夹具进行抓取开箱作业。第一探测件实时获取待打包物料的位置信息,控制组件接收来自第一探测件的信息,判断待打包物料定位完成后,向套箱组件发送套箱指令。机器人驱动开箱夹具将包装箱套装于待打包物料的外侧,实现物料的自动套箱,减少人工成本,提升生产效率。
本文地址:https://www.jishuxx.com/zhuanli/20250110/352836.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表