用于无人飞行器导引头风阻测试的测试装置及测试方法与流程
- 国知局
- 2025-01-10 13:39:37
本技术涉及风洞试验测量领域,特别涉及一种用于无人飞行器导引头风阻测试的测试装置及测试方法。
背景技术:
1、无人飞行器导引头外形优化技术在无人飞行器的总体方案论证中得到越来越多的重视,无人飞行器射程较远、工作时间长,无人飞行器导引头位于无人飞行器的头部位置,其低风阻的外形能够有效的降低无人飞行器的全弹阻力,从而极大地提升无人飞行器在同一工作时长的射程。因此,无人飞行器导引头的减阻技术在无人飞行器的总体方案论证中至关重要。
2、然而,由于无人飞行器导引头测试试验要求条件高,采用地面风洞试验费用高,试验条件难满足,飞行工况(攻角、马赫数)有限且状态离散,这些因素制约了无人飞行器导引头的外形方案优化与减阻技术发展。亟需一种试验条件要求低且能准确测试无人飞行器导引头阻力数据的测试装置。
技术实现思路
1、本技术实施例提供了一种用于无人飞行器导引头风阻测试的测试装置及测试方法。可以解决现有技术的无人飞行器导引头的减阻技术研究费用高、测试周期长、飞行工况有限且状态离散的技术问题。所述技术方案如下:
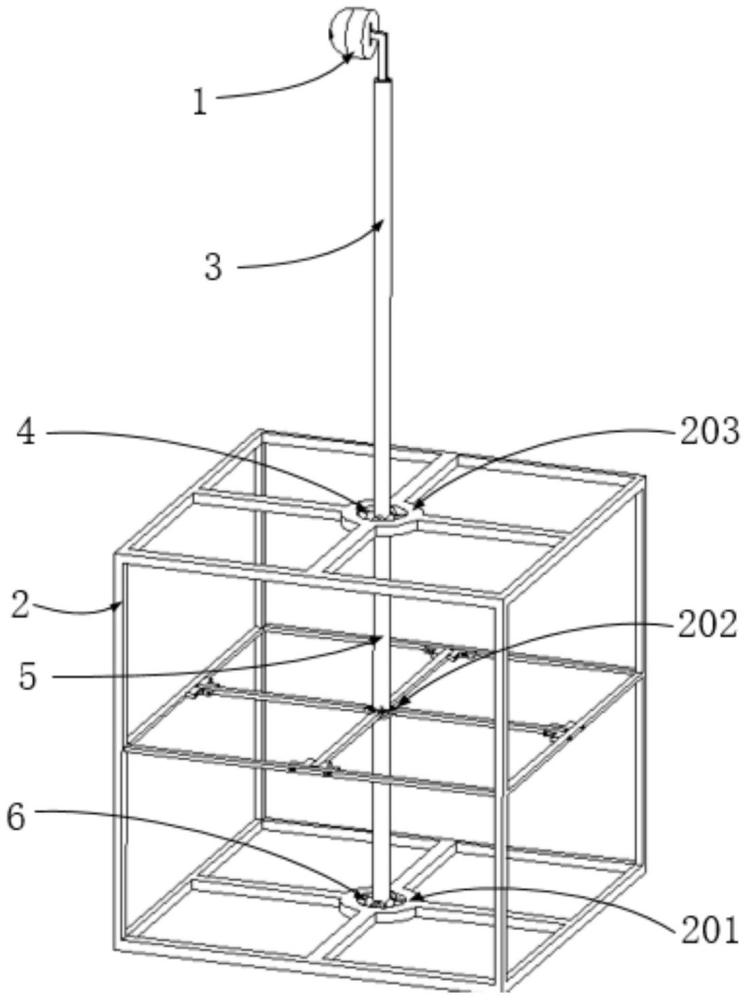
2、一方面,提供了一种用于无人飞行器导引头风阻测试的测试装置,所述无人飞行器导引头包括壳体,所述壳体内具有轴孔,所述轴孔的中心轴线过所述无人飞行器导引头的重心,所述测试装置包括:安装架,具有从下至上共轴线设置的下固定孔、中固定孔和上固定孔;上部支撑组件,从所述上固定孔中穿过,包括外筒和设在所述外筒内的内轴,且所述内轴的上端穿出所述外筒的上端,所述上固定孔和所述外筒之间设置有上部测力组件;下部支撑轴,从所述下固定孔内穿过,所述下固定孔与所述下部支撑轴之间设置有下部测力组件;方位轴系,具有第一安装筒、方位电机和第一输出轴,所述第一安装筒的中心轴线和所述第一输出轴的中心轴线重合;所述第一安装筒固定连接在所述中固定孔,所述外筒的下端和所述下部支撑轴的上端均与所述第一安装筒固定连接,所述内轴的下端与所述第一输出轴连接;俯仰轴系,具有第二安装筒、俯仰电机和第二输出轴,所述第二安装筒的中心轴线和所述第二输出轴的中心轴线重合;l形转接杆,包括竖杆部和横杆部,所述竖杆部的自由端与所述内轴的上端固定连接,所述横杆部的自由端固定连接所述第二安装筒,且所述第二安装筒的中心轴线为水平状态;惯性导航系统,安装在所述第二输出轴上,所述惯性导航系统的坐标系服从右手坐标系原则,其中,所述惯性导航系统的z轴与所述第二输出轴的中心轴线重合,x轴与所述横杆部的中心轴线重合;以及伺服控制系统,所述方位电机、俯仰电机、上部测力组件及下部测力组件均与所述控制系统电气连接。
3、可选的,所述内轴与所述外筒之间设置有轴承。
4、可选的,所述轴承位于所述外筒的上端。
5、可选的,所述安装架为空间长方体框架,所述空间长方体框架具有从下至上依次设置的下部田子框、中部田子框和上部田子框,且所述下部田子框与中部田子框之间通过连杆连接,中部田子框和上部田子框之间通过连杆连接;所述下固定孔位于所述下部田子框的中心处;所述中固定孔位于所述下部田子框的中心处;所述上固定孔位于所述下部田子框的中心处。
6、可选的,所述上部测力组件包括四个测力传感器,四个所述测力传感器周向均匀分布在所述外筒与所述上固定孔之间,其中一个所述测力传感器与所述横杆部处于同一平面内;所述下部测力组件包括四个测力传感器,四个所述测力传感器周向均匀分布在所述下部支撑轴与所述下固定孔之间,其中一个所述测力传感器与所述横杆部处于同一平面内。
7、可选的,所述惯性导航系统包括陀螺仪和加速度计。
8、第二方面,提供一种用于无人飞行器导引头风阻测试的测试装置的测试方法,应用于上述的测试装置,所述测试方法包括:
9、步骤1,安装惯性导航系统至第一输出轴,再将无人飞行器导引头安装至第一输出轴;
10、步骤2,安装架固定在测试车上,使无人飞行器导引头的俯仰角、方位角处在零位并电锁,上部测力组件、下部测力组件处在零位;
11、步骤3,启动测试车并加速至设定马赫数,伺服控制系统控制俯仰电机,使无人飞行器导引头的俯仰角保持在设定攻角附近,且实际攻角与设定攻角的偏差为±0.1°;
12、伺服控制系统控制方位电机,使无人飞行器导引头的方位角保持在0°附近,且实际方位角与方位角0°的偏差为±0.1°;
13、惯性导航系统实时获取导引头的位置、马赫数、方位角、俯仰角以及加速度;
14、测力传感器实时采集上部测力组件的上部力数据和下部测力组件的下部力数据;
15、步骤4,利用数据分析软件对位置、速度、方位角、俯仰角、加速度、上部力数据和下部力数据进行时间的统一,选择同时符合设定攻角和设定马赫数要求的相应时间段的位置、速度、方位角、俯仰角、加速度、上部力数据和下部力数据,拟合计算得到无人飞行器导引头的第一份阻力数据;
16、步骤5,以相同的设定攻角和设定马赫数条件,重复步骤3和步骤4,得到无人飞行器导引头的第二份阻力数据;
17、步骤6,以相同的设定攻角和设定马赫数条件,重复步骤3和步骤4,得到导引头的第三份阻力数据;
18、步骤7,对第一份阻力数据、第二份阻力数据和第三份阻力数据进行均值和方差统计。
19、可选的,在步骤2与步骤3之间,还包括伺服控制系统自检、惯性导航系统自检、上部测力组件自检和下部测力组件自检。
20、可选的,在步骤4中,所述数据分析软件为matlab、python或originlab。
21、本技术实施例提供的技术方案带来的有益效果至少包括:
22、一种用于无人飞行器导引头风阻测试的测试装置及测试方法,测试装置包括:安装架、上部支撑组件、下部支撑轴、方位轴系、俯仰轴系、l形转接杆、惯性导航系统以及伺服控制系统。通过上述技术方案,将安装架固定在测试车上,启动测试车行驶至预设马赫数,惯性导航系统可以实时获取无人飞行器导引头的姿态信息,例如位置、速度、方位角、俯仰角和加速度,并将姿态信息反馈给伺服控制系统。上部测力组件可以获取上部支撑组件的力数据,下部测力组件可以获取下部支撑轴的力数据,并将力数据信息反馈给伺服控制系统。在行驶过程中,测试车会受自然条件的影响,实际行驶速度不一定是预设马赫数,无人飞行器导引头的实际攻角也不一定是预设攻角,实际方位角也不一定是预设方位角,伺服控制系统可以根据获取的姿态信息实时控制俯仰电机,使无人飞行器导引头的攻角尽量靠近预设攻角,伺服控制系统也可以控制方位电机,使无人飞行器导引头的方位角尽量靠近预设方位角,例如方位角为0°。从而降低了无人飞行器导引头测试试验的要求。采用本技术的用于无人飞行器导引头风阻测试的测试装置,测试车在普通驾驶环境中也可以获取无人飞行器导引头在预设攻角和预设马赫数条件下的阻力数据,降低了无人飞行器导引头测试试验的条件,从而降低了试验费用,并且获取的工况阻力数据较多且连续,进而为无人飞行器导引头的减阻方案设计提供指导。
23、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
本文地址:https://www.jishuxx.com/zhuanli/20250110/354516.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表