一种基于移动超声成像的磁控介入导丝机器人的制作方法
- 国知局
- 2025-01-10 13:41:34
本发明涉及血管介入手术机器人,尤其涉及一种基于移动超声成像的磁控介入导丝机器人。
背景技术:
1、心脑血管疾病已成为世界疾病负担的主要原因,具有较高的发病率和死亡率。根据我国第七次人口普查数据测算,现有心脑血管疾病患者超过3.3亿。相比传统的开放手术,目前普遍采用的血管介入手术具有创口小、成功率高、恢复快、无需全身麻醉等多种优势,被广泛用于治疗各类心脑血管疾病,它是在医学影像设备的导引下,利用导丝、导管、球囊、支架等器械,通过扩张狭窄动脉、改善局部血供等途径来实现血运重建,是治疗各类心脑血管疾病的重要手段。
2、然而现有的血管介入手术存在辐射伤害大、手术时间长、对医生经验要求高等挑战,因此,国内外公司机构开始研发主从式血管介入手术机器人系统,以应对现有血管介入手术中的挑战。近几年,一些商用的血管介入手术机器人陆续被开发出来,少数几款在国外已获得fda和ce认证并上市,开始被应用于临床辅助医生更好地完成介入治疗。然而,现有的介入手术机器人仍然局限于操作被动的预塑形导丝/导管,无法实现仪器的主动转向和自主导航。
3、更进一步,在体内多分叉血管中,实现对主从式介入导丝/导管的三维实时定位和自动导航仍然是一个挑战。目前,现有技术虽然在改善介入手术方面取得了很大进展,并开展了医学应用,然而其普遍依赖于荧光成像作为术中引导,所产生的x射线对人体具有潜在的辐射伤害,且荧光成像难以实现对介入器械在体内的精确三维定位。此外,很少有技术在模拟组织或体内实现了对介入导丝/导管的实时定位跟踪和自主导航,因此机器人的自主性仍有待提高。
4、因此,针对现有技术的主要缺点,本发明自主设计并集成了一种基于移动超声成像的磁控介入导丝机器人,提供了一套自动化无辐射的介入手术解决方案,让医生不依赖x射线就能实现对介入导丝在模拟组织或体内的实时跟踪和自动导航,从而大大提高对介入导丝的导航效率,缩短介入操作时间,并让医生远离辐射伤害,减轻疲劳损害,在未来实现无辐射的血管介入手术。
技术实现思路
1、为了解决现有技术通过荧光成像术中引导无法实现仪器精确的三维实时定位和自动导航、且会产生辐射伤害的缺陷,本发明提出一种基于移动超声成像的磁控介入导丝机器人。
2、本发明采用的技术方案是,一种基于移动超声成像的磁控介入导丝机器人,包括:
3、推送模块,推送模块驱动顶端具有磁性结构的磁性导丝进行运动;
4、磁驱动模块,磁驱动模块不与磁性导丝进行接触,且磁性控制磁性导丝的顶端发生偏转;
5、超声跟踪模块,跟随磁性导丝的顶端运动,且在磁性导丝的移动路径上进行同步扫描成像;
6、控制终端,实时接收超声跟踪模块的同步扫描成像信号,控制终端与推送模块、磁驱动模块和超声跟踪模块信号连接。
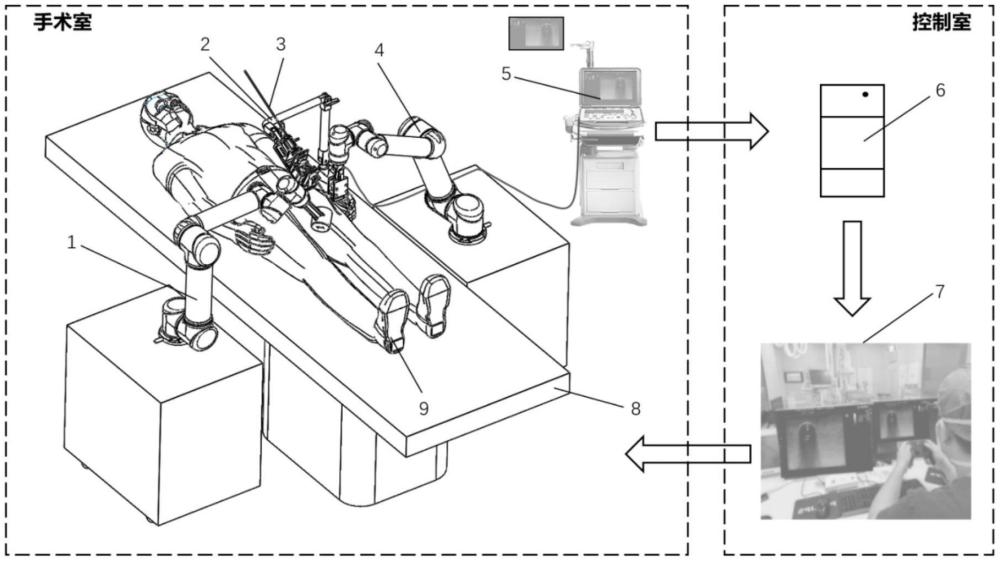
7、优选的,磁驱动模块包括第一移动座、第一关节机械臂和永磁体,第一关节机械臂的一端安装在第一移动座上,另一端安装有永磁体,永磁体控制磁性导丝的顶端发生偏转。
8、优选的,超声跟踪模块包括第二移动座、第二关节机械臂和超声探头,第二关节机械臂的一端安装在第二移动座上,另一端安装有超声探头,超声探头在磁性导丝的移动路径上进行同步扫描成像。
9、优选的,在患者坐卧时,磁控介入导丝机器人仅超声探头和磁性导丝与患者接触。
10、优选的,推送模块包括递送单元和转动单元,递送单元驱动磁性导丝在其轴线方向上运动,转动单元驱动磁性导丝转动。
11、优选的,磁性导丝包括相互连接的商用导丝和磁性结构,磁性结构包括至少一段磁铁,磁铁沿商用导丝方向布置。
12、优选的,磁性结构还包括硅胶管和硅胶聚合物,硅胶聚合物填充于硅胶管的中部,磁铁被套设在位于硅胶聚合物一侧的硅胶管内,硅胶聚合物另一侧的硅胶管中套设有商用导丝。
13、优选的,同步扫描成像信号包括磁性导丝的位置状态成像信号和磁性导丝的递送环境成像信号。
14、优选的,磁驱动模块和超声跟踪模块分别位于患者的两侧。
15、优选的,磁控介入导丝机器人还包括手术床,手术床能够相对于地面发生移动,推送模块安装在手术床上、且随手术床一同移动。
16、与现有技术相比,本发明具有以下有益效果:
17、本申请公开了一种基于移动超声成像的磁控介入导丝机器人,推送模块用于驱动磁性导丝进行运动,磁性导丝具有磁性结构,磁性结构能够在磁驱动模块的磁性作用下发生偏转,在此过程中磁驱动模块不与磁性导丝发生接触。超声跟踪模块能够随磁性导丝的顶端一同发生运动,并在此过程中在磁性导丝的移动路径上进行同步扫描成像,以获取实时超声图像。控制终端实时接收同步扫描成像信号,并与推送模块、磁驱动模块和超声跟踪模块信号连接,从而能够得以控制推送模块、磁驱动模块和超声跟踪模块正常工作。磁性导丝为主从式介入导丝,其磁性导丝能够在磁驱动模块的作用下实现自动转向和自主导航功能,搭配推送模块可进一步提高磁性导丝运动的可控程度,获得更为准确的运行精度。同时超声跟踪模块的超声实时跟踪方式同样能够在最大程度上实现体内的精准三维定位,避免了荧光成像效果不佳的情况。此外,超声跟踪的方式是一种无辐射的成像方式,在获取三维位置信号时并不会对人体造成潜在的辐射伤害。而通过预测控制策略则能够实时地根据磁性导丝的位置信息实现闭环控制,从而对磁性导丝进行实时修正,进而大幅提高磁性导丝的递送精度。
18、与现有技术相比,本申请公开的一种基于移动超声成像的磁控介入导丝机器人,可以实现使仪器获得精准的三维实时定位和自动导航、且避免辐射伤害的目的。
技术特征:1.一种基于移动超声成像的磁控介入导丝机器人,其特征在于,包括:
2.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述磁驱动模块包括第一移动座、第一关节机械臂和永磁体,所述第一关节机械臂的一端安装在所述第一移动座上,另一端安装有所述永磁体,所述永磁体控制所述磁性导丝的顶端发生偏转。
3.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述超声跟踪模块包括第二移动座、第二关节机械臂和超声探头,所述第二关节机械臂的一端安装在所述第二移动座上,另一端安装有所述超声探头,所述超声探头在所述磁性导丝的移动路径上进行同步扫描成像。
4.根据权利要求3所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,在患者坐卧时,所述磁控介入导丝机器人仅所述超声探头和所述磁性导丝与患者接触。
5.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述推送模块包括递送单元和转动单元,所述递送单元驱动所述磁性导丝在其轴线方向上运动,所述转动单元驱动所述磁性导丝转动。
6.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述磁性导丝包括相互连接的商用导丝和磁性结构,所述磁性结构包括至少一段磁铁,所述磁铁沿所述商用导丝方向布置。
7.根据权利要求6所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述磁性结构还包括硅胶管和硅胶聚合物,所述硅胶聚合物填充于所述硅胶管的中部,所述磁铁被套设在位于所述硅胶聚合物一侧的所述硅胶管内,所述硅胶聚合物另一侧的所述硅胶管中套设有所述商用导丝。
8.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述同步扫描成像信号包括所述磁性导丝的位置状态成像信号和所述磁性导丝的递送环境成像信号。
9.根据权利要求1所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述磁驱动模块和所述超声跟踪模块分别位于患者的两侧。
10.根据权利要求1至9中任意一项所述的一种基于移动超声成像的磁控介入导丝机器人,其特征在于,所述磁控介入导丝机器人还包括手术床,所述手术床能够相对于地面发生移动,所述推送模块安装在所述手术床上、且随所述手术床一同移动。
技术总结本发明涉及一种基于移动超声成像的磁控介入导丝机器人,推送模块用于驱动磁性导丝进行运动,磁性导丝具有磁性结构,磁性结构能够在磁驱动模块的磁性作用下发生偏转,在此过程中磁驱动模块不与磁性导丝发生接触。超声跟踪模块能够随磁性导丝的顶端一同发生运动,并在此过程中在磁性导丝的移动路径上进行同步扫描成像,以获取实时超声图像。控制终端实时接收同步扫描成像信号,并与推送模块、磁驱动模块和超声跟踪模块信号连接,从而能够得以控制推送模块、磁驱动模块和超声跟踪模块正常工作。与现有技术相比,本申请公开的一种基于移动超声成像的磁控介入导丝机器人,可以实现使仪器获得精准的三维实时定位和自动导航、且避免辐射伤害的目的。技术研发人员:徐天添,付仕雄,马国耀,蔡明学,潘湘斌,鞠文浩,吴新宇受保护的技术使用者:深圳先进技术研究院技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/354730.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表