一种工业用具有受力检测的工业抓取机械手的制作方法
- 国知局
- 2025-01-10 13:45:14
本发明涉及工业机械手领域,尤其涉及一种工业用具有受力检测的工业抓取机械手。
背景技术:
1、随着制造业对生产效率、产品质量以及工作安全性的要求不断提高,传统的人工抓取和搬运方式已经难以满足现代工业生产的需要。因此,具有高精度、高效率和高稳定性的工业抓取机械手应运而生。这种机械手的设计灵感来源于对人类手臂功能的模拟,旨在实现对工件的高效、精准抓取和搬运。为了实现这一目标,机械手的执行机构、驱动机构、控制系统以及检测装置等关键部件都经过了精心的设计和优化。其中,受力检测是这种机械手的核心技术之一。通过在机械手的抓取部件中安装精密的传感器,如压力传感器或扭矩传感器,可以实时监测机械手在抓取工件时所受的力。当前广泛应用的配备有受力检测功能的工业抓取机械手,在执行尿素袋搬运任务时,通常先稳固抓取尿素袋,随后将其引导至集料池附近。在此转移过程中,集料池前端预设的刀片在尿素袋底部中心区域切割出开口,使得袋内颗粒流入集料池。然而,实际操作中,鉴于裂口定位于袋底中央,袋内四角区域往往成为颗粒滞留的主要区域,导致该部分颗粒未能有效倾泻至集料池中,而是随同尿素袋体一同被送入回收箱,此举一定程度上造成了原料资源的非必要损耗。
技术实现思路
1、本发明的目的是为了解决背景技术中的问题,而提出的一种工业用具有受力检测的工业抓取机械手。
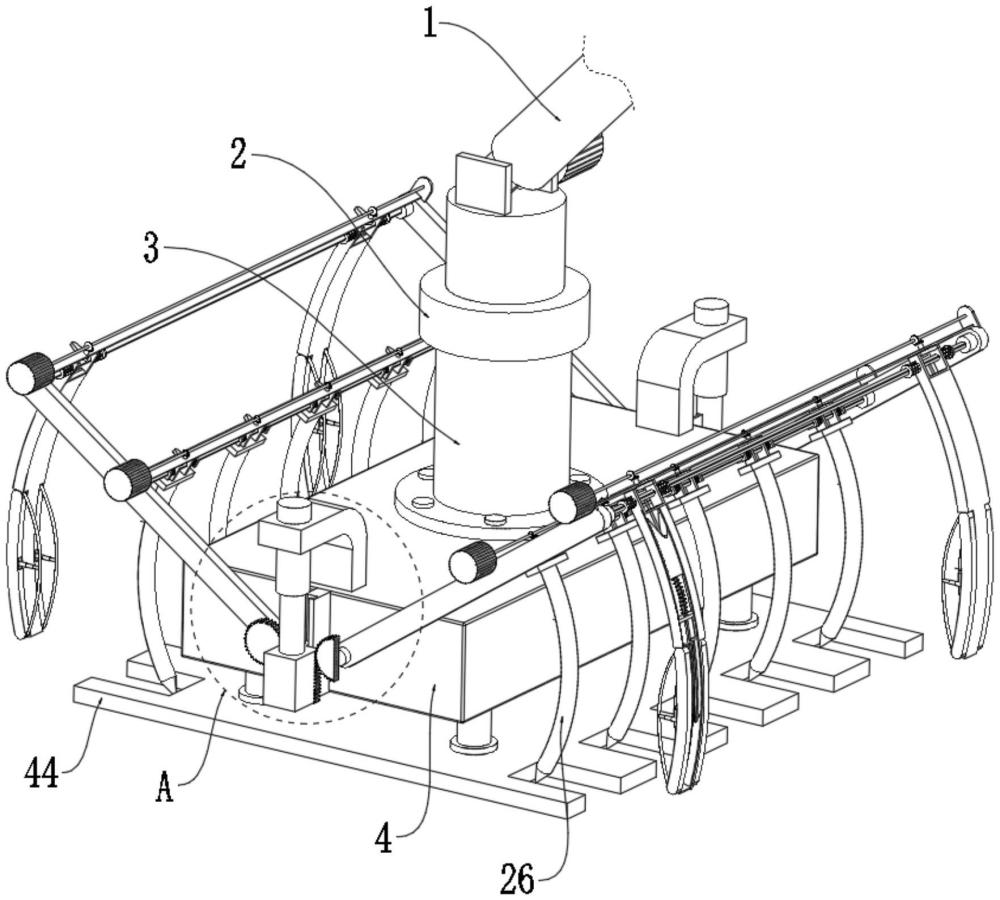
2、为了实现上述目的,本发明采用了如下技术方案:一种工业用具有受力检测的工业抓取机械手,包括机械臂主体,所述机械臂主体移动端固定安装有压力检测装置,所述压力检测装置底部检测端安装有立柱,所述立柱底部固定安装有组装台,所述组装台两端均转动连接有对称的两个转轴,每两个所述转轴之间均焊接有安装架,每个所述安装架两侧之间均焊接有滑杆一,每个所述滑杆一底部均焊接有两个弧形杆,每个所述弧形杆底部均转动连接有滚轮,每个所述滑杆一外周壁上均滑动设置有两个撑杆,每个所述滑杆一外周壁上均焊接有若干个圆板,每个所述滑杆一外周壁上均绕设有若干个弹簧一,且每个弹簧一一一对应连接在每个圆板与对应撑杆的侧壁之间,每个所述安装架侧壁上均固定安装有电机一,每个所述电机一输出端均固定安装有传动杆一,每个所述传动杆一外周壁上均焊接有两个主动锥齿轮一,每个所述安装架侧壁上均转动连接有两个转杆一,每个所述转杆一两端均分别焊接有从动锥齿轮一和凸轮一,且每个从动锥齿轮一分别与其对应的主动锥齿轮一相啮合,设置的电机一带动传动杆一、主动锥齿轮一、从动锥齿轮一、转杆一和凸轮一进行旋转,旋转的凸轮一和弹簧一相互配合拨动撑杆进行左右往复晃动。
3、在上述的一种工业用具有受力检测的工业抓取机械手中,所述组装台顶部焊接有两个l型板,两个所述l型板顶部均固定安装有电动伸缩杆,两个所述电动伸缩杆底部伸缩端均固定安装有齿块,每个所述转轴远离组装台的一侧均焊接有传动齿轮,且每两个传动齿轮分别与每个齿块相啮合,设置的电动伸缩杆带动齿块上移,由于齿块与传动齿轮相啮合,使得上移的齿块会带动传动齿轮进行旋转,传动齿轮会带动转轴以及安装架向下翻转,设置的撑杆穿过辊道输送机上相邻两个输送辊之间的间隙翻转到袋体的底部,以此来对袋体进行底部支撑,此举增强了袋体转移的稳定性。
4、在上述的一种工业用具有受力检测的工业抓取机械手中,所述安装架两侧之间焊接有滑杆二,所述滑杆二外周壁上滑动设置有若干个竖板,每两个所述竖板底部之间均焊接有安装板,每个所述安装板底部均焊接有插杆,所述滑杆二外周壁上均焊接有若干个方形板,所述滑杆二外周壁上均绕设有若干个弹簧二,且每个弹簧二一一对应连接在每个方形板与每个竖板的侧壁之间,所述安装架侧壁上固定安装有电机二,所述电机二输出端固定安装有传动杆二,所述传动杆二外周壁上焊接有两个主动锥齿轮二,所述安装架侧壁上转动连接有两个转杆二,两个所述转杆二两端均分别焊接有从动锥齿轮二和凸轮二,且两个从动锥齿轮二分别与其对应的主动锥齿轮二相啮合,设置的电机二带动凸轮二进行旋转,旋转的凸轮二和弹簧二相互配合拨动插杆进行左右往复晃动,借助撑杆和插杆的左右往复晃动对袋体进行震动作业,进而促进袋体内部滞留的颗粒物进行下料。
5、在上述的一种工业用具有受力检测的工业抓取机械手中,所述撑杆内腔侧壁滑动设置有异形齿条,所述异形齿条顶部焊接有凹形块,所述异形齿条外周壁上绕设有弹簧三,且弹簧三连接在凹形块底部与撑杆内腔侧壁之间,在撑杆左右往复晃动的过程中,设置的滚轮会沿着凹形块的凹面间歇性的推挤凹形块和异形齿条下移。
6、在上述的一种工业用具有受力检测的工业抓取机械手中,所述撑杆内腔两端侧壁之间转动连接有转杆三,所述转杆三外周壁上焊接有联动齿轮,且联动齿轮与异形齿条相啮合,所述转杆三两端均焊接有摆杆,间歇性下移的异形齿条会带动联动齿轮进行正反转往复移动,设置的联动齿轮则会带动转杆三和摆杆进行正反转往复摆动,借助正反转往复摆动的摆杆对袋体底部的四角进行击打,以此来进一步促进袋体内部滞留的颗粒物进行下料。
7、在上述的一种工业用具有受力检测的工业抓取机械手中,所述摆杆表面凹槽内固定安装有多段弹性伸缩杆,所述多段弹性伸缩杆的伸缩杆连接有耐磨布条,且耐磨布条的两端分别与摆杆的两端相连接,初始时,设置的多段弹性伸缩杆由于受到袋体重量的影响而发生收缩;随着颗粒物的不断倾泻,袋体的质量随之减小,设置的多段弹性伸缩杆在自身弹力的作用下向上复位并将袋体的底部四角顶起,以此来辅助袋体下料;此外,复位后的多段弹性伸缩杆将耐磨布条顶起,此举使得摆杆在摆动时不易推挤袋体向限位板底部中心方向移动,此举一定程度上降低了袋体从撑杆和插杆上脱离的风险。
8、在上述的一种工业用具有受力检测的工业抓取机械手中,所述组装台两端侧壁上均焊接有滑轨,且两个齿块一一对应滑动设置在两个滑轨内,设置的滑轨增强了齿块移动时的稳定性。
9、在上述的一种工业用具有受力检测的工业抓取机械手中,所述组装台底部通过若干个连接杆固定安装有限位板,空袋在限位板的作用下从撑杆和插杆上脱离并下落到收集箱内腔中。
10、与现有的技术相比,本工业用具有受力检测的工业抓取机械手的优点在于:
11、1.设置的多段弹性伸缩杆在自身弹力的作用下向上复位并将袋体的底部四角顶起,以此来辅助袋体下料;此外,设置的电机一和电机二分别带动凸轮一和凸轮二进行旋转,进而使得撑杆和插杆进行左右往复晃动,借助撑杆和插杆的左右往复晃动对袋体进行震动作业,进而促进袋体内部滞留的颗粒物进行下料;
12、2.借助正反转往复摆动的摆杆对袋体底部的四角进行击打,以此来进一步促进袋体内部滞留的颗粒物进行下料;其中,左右往复晃动的撑杆会带动摆动的摆杆进行同步运动,此举一定程度上增大了摆杆的击打范围;
13、3.复位后的多段弹性伸缩杆将耐磨布条顶起,此举使得摆杆在摆动时不易推挤袋体向限位板底部中心方向移动,此举一定程度上降低了袋体从撑杆和插杆上脱离的风险。
技术特征:1.一种工业用具有受力检测的工业抓取机械手,包括机械臂主体(1),其特征在于:所述机械臂主体(1)移动端固定安装有压力检测装置(2),所述压力检测装置(2)底部检测端安装有立柱(3),所述立柱(3)底部固定安装有组装台(4),所述组装台(4)两端均转动连接有对称的两个转轴(5),每两个所述转轴(5)之间均焊接有安装架(6),每个所述安装架(6)两侧之间均焊接有滑杆一(7),每个所述滑杆一(7)底部均焊接有两个弧形杆(8),每个所述弧形杆(8)底部均转动连接有滚轮(9),每个所述滑杆一(7)外周壁上均滑动设置有两个撑杆(10),每个所述滑杆一(7)外周壁上均焊接有若干个圆板(11),每个所述滑杆一(7)外周壁上均绕设有若干个弹簧一(12),且每个弹簧一(12)一一对应连接在每个圆板(11)与对应撑杆(10)的侧壁之间,每个所述安装架(6)侧壁上均固定安装有电机一(13),每个所述电机一(13)输出端均固定安装有传动杆一(14),每个所述传动杆一(14)外周壁上均焊接有两个主动锥齿轮一(15),每个所述安装架(6)侧壁上均转动连接有两个转杆一(16),每个所述转杆一(16)两端均分别焊接有从动锥齿轮一(17)和凸轮一(18),且每个从动锥齿轮一(17)分别与其对应的主动锥齿轮一(15)相啮合。
2.根据权利要求1所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述组装台(4)顶部焊接有两个l型板(19),两个所述l型板(19)顶部均固定安装有电动伸缩杆(20),两个所述电动伸缩杆(20)底部伸缩端均固定安装有齿块(21),每个所述转轴(5)远离组装台(4)的一侧均焊接有传动齿轮(22),且每两个传动齿轮(22)分别与每个齿块(21)相啮合。
3.根据权利要求1所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述安装架(6)两侧之间焊接有滑杆二(23),所述滑杆二(23)外周壁上滑动设置有若干个竖板(24),每两个所述竖板(24)底部之间均焊接有安装板(25),每个所述安装板(25)底部均焊接有插杆(26),所述滑杆二(23)外周壁上均焊接有若干个方形板(27),所述滑杆二(23)外周壁上均绕设有若干个弹簧二(28),且每个弹簧二(28)一一对应连接在每个方形板(27)与每个竖板(24)的侧壁之间,所述安装架(6)侧壁上固定安装有电机二(29),所述电机二(29)输出端固定安装有传动杆二(30),所述传动杆二(30)外周壁上焊接有两个主动锥齿轮二(31),所述安装架(6)侧壁上转动连接有两个转杆二(32),两个所述转杆二(32)两端均分别焊接有从动锥齿轮二(33)和凸轮二(34),且两个从动锥齿轮二(33)分别与其对应的主动锥齿轮二(31)相啮合。
4.根据权利要求1所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述撑杆(10)内腔侧壁滑动设置有异形齿条(35),所述异形齿条(35)顶部焊接有凹形块(36),所述异形齿条(35)外周壁上绕设有弹簧三(37),且弹簧三(37)连接在凹形块(36)底部与撑杆(10)内腔侧壁之间。
5.根据权利要求4所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述撑杆(10)内腔两端侧壁之间转动连接有转杆三(38),所述转杆三(38)外周壁上焊接有联动齿轮(39),且联动齿轮(39)与异形齿条(35)相啮合,所述转杆三(38)两端均焊接有摆杆(40)。
6.根据权利要求5所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述摆杆(40)表面凹槽内固定安装有多段弹性伸缩杆(41),所述多段弹性伸缩杆(41)的伸缩杆连接有耐磨布条(42),且耐磨布条(42)的两端分别与摆杆(40)的两端相连接。
7.根据权利要求2所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述组装台(4)两端侧壁上均焊接有滑轨(43),且两个齿块(21)一一对应滑动设置在两个滑轨(43)内。
8.根据权利要求1所述的一种工业用具有受力检测的工业抓取机械手,其特征在于:所述组装台(4)底部通过若干个连接杆固定安装有限位板(44)。
技术总结本发明涉及工业机械手领域,尤其涉及一种工业用具有受力检测的工业抓取机械手,包括机械臂主体,所述机械臂主体移动端固定安装有压力检测装置,所述压力检测装置底部检测端安装有立柱,所述立柱底部固定安装有组装台,所述组装台两端均转动连接有对称的两个转轴,每两个所述转轴之间均焊接有安装架,每个所述安装架两侧之间均焊接有滑杆一,每个所述滑杆一底部均焊接有两个弧形杆,每个所述弧形杆底部均转动连接有滚轮,设置的电机一和电机二分别带动凸轮一和凸轮二进行旋转,进而使得撑杆和插杆进行左右往复晃动,借助撑杆和插杆的左右往复晃动对袋体进行震动作业,进而促进袋体内部滞留的颗粒物进行下料。技术研发人员:吴昌来,梁少辉受保护的技术使用者:深圳市金伍源实业有限公司技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/355025.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。