一种刺梨采摘机器人
- 国知局
- 2025-01-10 13:45:10
本发明涉及刺梨采摘,具体为一种刺梨采摘机器人。
背景技术:
1、刺梨为蔷薇科多年生落叶灌木缫丝花的果实,又名山王果、刺莓果、佛朗果、茨梨、木梨子,别名刺菠萝、送春归、刺酸梨子、九头鸟、文先果,是滋补健身的营养珍果,是一种稀有的果实。生于海拔500米-2500米的向阳山坡、沟谷、路旁以及灌木丛中,是贵州、鄂西山区、湘西、凉山、冕宁山区等地的天然野果,在贵州省和河南省开封市有大面积的人工种植,其中在进行刺梨采摘时,需要使用到相关的采摘机器人,但它在实际使用中仍存在以下弊端:
2、目前,现有的刺梨采摘机器人,在进行使用时,其续航能力有限,往往使用一段时间后,需要进行充电后才能够进行使用,其采摘效率较为的低下,使用起来存在一定局限性;或者现有的刺梨采摘机器人,在进行使用时,其高度较为的固定,对于位置较高处的刺梨难以进行采摘,使用起来存在一定局限性,因此需要改进出一种刺梨采摘机器人来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种刺梨采摘机器人,以解决上述背景技术中提出的问题。
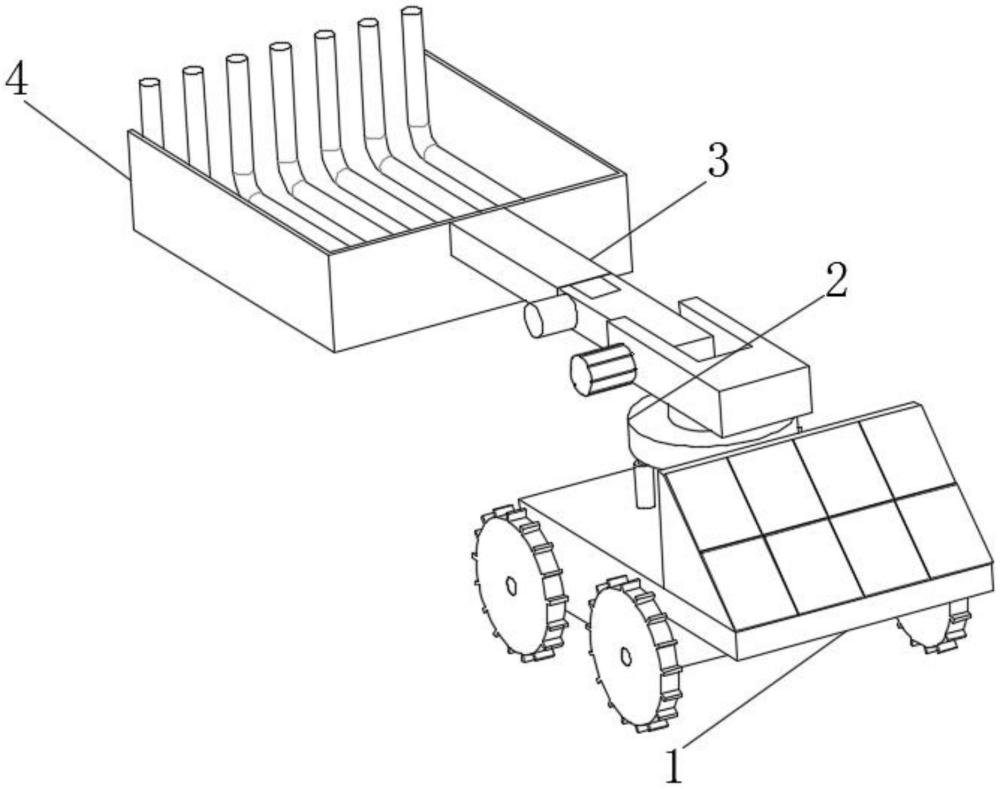
2、为实现上述目的,本发明提供如下技术方案:一种刺梨采摘机器人,包括机器人组件,所述机器人组件包括机器人本体和梯形台,且梯形台固定连接在机器人本体上表面一端,所述梯形台一侧表面固定连接有太阳能电池板,且机器人本体两侧端表面下部转动连接有防滑轮,所述机器人组件上表面中部固定连接有功能组件。
3、优选的,所述功能组件包括支撑台和电动伸缩杆,且电动伸缩杆固定连接在支撑台底面四边角,所述电动伸缩杆总数量为四个。
4、优选的,所述支撑台底面中部固定连接有第一电机,且支撑台上表面中部转动连接有旋转台。
5、优选的,所述功能组件上表面固定连接有调节组件,且调节组件包括第一调节臂和第二调节臂,所述第二调节臂活动连接在第一调节臂一端。
6、优选的,所述第二调节臂外一侧表面中部固定连接有第二电机,且第二调节臂一端活动连接有第三调节臂。
7、优选的,所述第三调节臂外一侧端表面中部固定连接有第三电机,且第三调节臂外一端表面中部设置有螺孔。
8、优选的,所述调节组件一端螺纹连接有采摘组件,且采摘组件包括u型件和螺柱,所述螺柱固定连接在u型件一侧表面中上部,且u型件另一侧表面下部等距离固定连接有采摘爪。
9、与现有技术相比,本发明提供了一种刺梨采摘机器人,具备以下有益效果:
10、1、该一种刺梨采摘机器人,通过设置的机器人组件,具有提高采摘机器人的续航能力,从而提高其采摘效率的优点,解决了现有的刺梨采摘机器人,在进行使用时,其续航能力有限,往往使用一段时间后,需要进行充电后才能够进行使用,其采摘效率较为的低下,使用起来存在一定局限性的问题。
11、2、该一种刺梨采摘机器人,通过设置的功能组件,具有对采摘机器人的高度进行调节的效果,解决了现有的刺梨采摘机器人,在进行使用时,其高度较为的固定,对于位置较高处的刺梨难以进行采摘,使用起来存在一定局限性的问题。
技术特征:1.一种刺梨采摘机器人,其特征在于,包括机器人组件(1),所述机器人组件(1)包括机器人本体(11)和梯形台(13),且梯形台(13)固定连接在机器人本体(11)上表面一端,所述梯形台(13)一侧表面固定连接有太阳能电池板(14),且机器人本体(11)两侧端表面下部转动连接有防滑轮(12),所述机器人组件(1)上表面中部固定连接有功能组件(2)。
2.根据权利要求1所述的一种刺梨采摘机器人,其特征在于,所述功能组件(2)包括支撑台(21)和电动伸缩杆(22),且电动伸缩杆(22)固定连接在支撑台(21)底面四边角,所述电动伸缩杆(22)总数量为四个。
3.根据权利要求2所述的一种刺梨采摘机器人,其特征在于,所述支撑台(21)底面中部固定连接有第一电机(23),且支撑台(21)上表面中部转动连接有旋转台(24)。
4.根据权利要求1所述的一种刺梨采摘机器人,其特征在于,所述功能组件(2)上表面固定连接有调节组件(3),且调节组件(3)包括第一调节臂(31)和第二调节臂(32),所述第二调节臂(32)活动连接在第一调节臂(31)一端。
5.根据权利要求4所述的一种刺梨采摘机器人,其特征在于,所述第二调节臂(32)外一侧表面中部固定连接有第二电机(34),且第二调节臂(32)一端活动连接有第三调节臂(33)。
6.根据权利要求5所述的一种刺梨采摘机器人,其特征在于,所述第三调节臂(33)外一侧端表面中部固定连接有第三电机(35),且第三调节臂(33)外一端表面中部设置有螺孔(331)。
7.根据权利要求4所述的一种刺梨采摘机器人,其特征在于,所述调节组件(3)一端螺纹连接有采摘组件(4),且采摘组件(4)包括u型件(41)和螺柱(42),所述螺柱(42)固定连接在u型件(41)一侧表面中上部,且u型件(41)另一侧表面下部等距离固定连接有采摘爪(43)。
技术总结本发明涉及刺梨采摘技术领域,且公开了一种刺梨采摘机器人,包括机器人组件,机器人组件包括机器人本体和梯形台,且梯形台固定连接在机器人本体上表面一端,梯形台一侧表面固定连接有太阳能电池板,且机器人本体两侧端表面下部转动连接有防滑轮,机器人组件上表面中部固定连接有功能组件。该一种刺梨采摘机器人,通过设置的机器人组件和功能组件,解决了现有的刺梨采摘机器人,在进行使用时,其续航能力有限,往往使用一段时间后,需要进行充电后才能够进行使用,其采摘效率较为的低下,使用起来存在一定局限性;或者现有的刺梨采摘机器人,其高度较为的固定,对于位置较高处的刺梨难以进行采摘,使用起来存在一定局限性的问题。技术研发人员:陈祖星,冯俊杰,祝昆,杨真艳,周文平,阳卫,王艳红,任明月,张启龙受保护的技术使用者:六盘水师范学院技术研发日:技术公布日:2025/1/6本文地址:https://www.jishuxx.com/zhuanli/20250110/355014.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表