一种车载单北斗定位终端系统的制作方法
- 国知局
- 2025-01-10 13:47:04
本发明涉及车载定位,具体为一种车载单北斗定位终端系统。
背景技术:
1、随着物联网的快速发展,车联网已成为物联网的重要组成部分;利用无线通信与网络技术,以及先进的感知器件,对汽车各类信息进行采集、分析、处理,实现对车辆的有效管理和高效利用;其中,车载定位终端是实现车辆位置信息采集的重要设备,主要完成车辆追踪与线路规划。
2、公开号为cn105510947b的中国专利公开了一种车载定位终端及车载定位方法,其中,车载定位终端包括:gps硬件模块、通信硬件模块和中央控制模块;中央控制模块包括gps单元、通信单元和业务逻辑单元;业务逻辑单元用于根据gps硬件模块的关闭周期以及获取的车载定位终端的运动参数,判断是否打开gps硬件模块;gps硬件模块用于在运行周期内采集车载定位终端所在位置的定位信息;业务逻辑单元,还用于获取gps硬件模块采集的定位信息并进行处理,将处理后的信息发送给通信硬件模块;通信硬件模块用于将业务逻辑单元处理的信息发送给外部的通讯服务器或移动终端;能够解决车载定位终端待机及工作时间短的问题,节省电源的消耗,提供更长的跟踪时间;但是,该专利存在以下缺陷:
3、现有的车载定位终端,其定位可靠性差,不能有效地提高车辆的安全性和运行效率,导致使用效果差。
技术实现思路
1、本发明的目的在于提供一种车载单北斗定位终端系统,该系统体积小,重量轻,易于安装和使用,且具有较高的精度和可靠性,可以有效地提高车辆的安全性和运行效率,提升使用效果,解决了上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
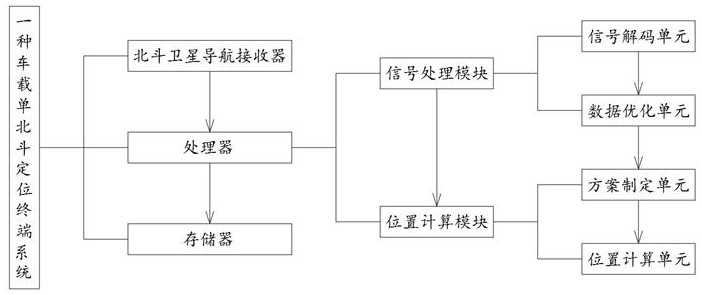
3、一种车载单北斗定位终端系统,包括安装在车辆上的处理器、北斗卫星导航接收器和存储器,所述北斗卫星导航接收器,用于接收来自北斗卫星向地面发送的信号,确定北斗卫星信号;
4、处理器,用于对北斗卫星信号进行处理,确定车辆位置信息;
5、存储器,用于存储北斗卫星信号及车辆位置信息。
6、优选的,北斗卫星导航接收器接收北斗卫星发送的信号,执行以下操作:
7、基于车载单北斗定位需求,建立北斗卫星导航接收器与北斗卫星之间的信号传输连接;
8、其中,北斗卫星导航接收器向北斗卫星传输请求建立信号传输连接的指令,北斗卫星基于北斗卫星导航接收器传输的请求建立信号传输连接的指令,北斗卫星向北斗卫星导航接收器传输同意建立信号传输连接的指令;
9、北斗卫星导航接收器接收到北斗卫星传输的同意建立信号传输连接的指令,北斗卫星导航接收器基于北斗卫星传输的同意建立信号传输连接的指令与北斗卫星建立信号传输连接;
10、其中,北斗卫星向地面发送电磁波信号,通过车辆上安装的北斗卫星导航接收器对北斗卫星发送的电磁波信号进行捕捉及接收,进而确定出北斗卫星信号。
11、优选的,实时监测北斗卫星导航接收器与北斗卫星之间的信号传输运行质量,并在信号传输运行异常时,进行异常报警,包括:
12、实时监测北斗卫星导航接收器与北斗卫星之间的第一信号传输运行参数和第二信号传输运行参数,其中,所述第一信号传输运行参数包括每个北斗卫星信号强度、信号传输延迟率、信噪比和卫星数量;所述第二信号传输运行参数包括多路径信号衰落幅度、多路径延迟率和反射路径信号与直射路径信号强度的比值;
13、利用所述第一信号传输运行参数获取每个北斗卫星与所述北斗卫星导航接收器之间的第一运行评价系数;
14、其中,所述每个北斗卫星对应的第一运行评价系数通过如下公式获取:
15、;
16、其中,r01表示每个北斗卫星对应的第一运行评价系数;n表示北斗卫星导航接收器与每个北斗卫星之间的信号传输经历的单位时间的个数,并且,所述单位时间为1s;si表示每个北斗卫星的第i个的单位时间对应的北斗卫星信号强度;snri表示每个北斗卫星的第i个的单位时间对应的信噪比;snrx表示预设的信噪比参考值;ε预设的比例系数,并且,所述比例系数的取值范围为0.001-0.008;smax和smin表示每个北斗卫星对应的n个单位时间出现的北斗卫星信号强度最大值和最小值;sb表示n个单位时间的北斗卫星信号强度标准差;ptb表示每个北斗卫星对应的n个单位时间的信号传输延迟率标准差;ptmax表示每个北斗卫星对应的n个单位时间出现的信噪比最大值时对应的信号传输延迟率;
17、将所述每个北斗卫星对应的第一运行评价系数与预设的第一系数阈值进行比较;
18、当所述每个北斗卫星对应的第一运行评价系数低于预设的第一系数阈值时,则调取第二信号传输运行参数,并利用所述第二信号传输运行参数判定北斗卫星导航接收器与北斗卫星之间的信号传输运行是否存在异常。
19、优选的,当所述每个北斗卫星对应的第一运行评价系数低于预设的第一系数阈值时,则调取第二信号传输运行参数,并利用所述第二信号传输运行参数判定北斗卫星导航接收器与北斗卫星之间的信号传输运行是否存在异常,包括:
20、当多个北斗卫星中存在任意一个北斗卫星对应的第一运行评价系数低于预设的第一系数阈值时,则将第一运行评价系数低于预设的第一系数阈值对应的北斗卫星作为目标卫星;
21、调取所述目标卫星的第二信号传输运行参数;其中,所述目标卫星的第二信号传输运行参数包括目标卫星对应的多路径信号衰落幅度、多路径延迟率和反射路径信号与直射路径信号强度的比值;
22、利用所述目标卫星的第二信号传输运行参数获取目标卫星对应的第二运行评价系数;
23、其中,所述目标卫星对应的第二运行评价系数通过如下公式获取:
24、;
25、其中,r02m表示目标卫星对应的第二运行评价系数;dm表示目标卫星对应的反射路径信号与直射路径信号强度的比值;rm01表示目标卫星对应的第一运行评价系数;ry表示预设的第一系数阈值;β表示调节系数,并且,所述调节系数的取值范围为0.38-1.17;mfm表示目标卫星对应的多路径信号衰落幅度的比例数值;mtm表示目标卫星对应的多路径延迟率;bmb表示目标卫星对应的n个单位时间的北斗卫星信号强度变化率;
26、将所述目标卫星对应的第二运行评价系数与预设的第二系数阈值进行比较;
27、当所述目标卫星对应的第二运行评价系数超过预设的第二系数阈值时,则只对目标卫星进行风险预警;
28、当所述目标卫星对应的第二运行评价系数未超过预设的第二系数阈值时,则结合除了目标卫星之外的其他北斗卫星的第二运行评价系数判定北斗卫星导航接收器与北斗卫星之间的信号传输运行是否存在异常。
29、优选的,当所述目标卫星对应的第二运行评价系数未超过预设的第二系数阈值时,则结合除了目标卫星之外的其他北斗卫星的第二运行评价系数判定北斗卫星导航接收器与北斗卫星之间的信号传输运行是否存在异常,包括:
30、当所述目标卫星对应的第二运行评价系数未超过预设的第二系数阈值时,则将除了目标卫星之外的其他北斗卫星作为观测卫星;
31、提取所述观测卫星对应的第二信号传输运行参数;其中,所述观测卫星的第二信号传输运行参数包括目标卫星对应的多路径信号衰落幅度、多路径延迟率和反射路径信号与直射路径信号强度的比值;
32、利用所述观测卫星对应的第二信号传输运行参数获取所述观测卫星对应的第二运行评价系数;
33、其中,所述观测卫星对应的第二运行评价系数通过如下公式获取:
34、;
35、其中,r02g表示观测卫星对应的第二运行评价系数;dm表示目标卫星对应的反射路径信号与直射路径信号强度的比值;dg表示观测卫星对应的反射路径信号与直射路径信号强度的比值;mfg表示观测卫星对应的多路径信号衰落幅度的比例数值;mtg表示观测卫星对应的多路径延迟率;bgb表示观测卫星对应的n个单位时间的北斗卫星信号强度变化率;bmb表示目标卫星对应的n个单位时间的北斗卫星信号强度变化率;
36、利用所述观测卫星对应的第二运行评价系数和目标卫星对应的第二运行评价系数获取综合运行评价系数;
37、其中,所述综合运行评价系数通过如下公式获取:
38、;
39、其中,rz表示综合运行评价系数;m表示观测卫星的数量;r02gi表示第i个观测卫星对应的第二运行评价系数;r02m表示目标卫星对应的第二运行评价系数;λ表示调节因子,并且,所述调节因子的取值范围为0.27-0.82;
40、将所述综合运行评价系数与预设的综合系数阈值进行比较;
41、当所述综合运行评价系数低于预设的综合系数阈值,则判定北斗卫星导航接收器与北斗卫星之间的信号传输运行存在异常,并进行异常报警。
42、优选的,所述处理器,包括:
43、信号处理模块,用于对北斗卫星信号进行解码处理,确定北斗卫星导航数据,且对北斗卫星导航数据进行清洗优化;
44、位置计算模块,用于采用基于距离的最近邻算法计算车辆位置信息。
45、优选的,所述信号处理模块,包括:
46、信号解码单元,用于对北斗卫星信号进行解码处理;
47、获取北斗卫星信号,从北斗卫星信号中提取pn码,
48、其中,pn码是北斗卫星系统中用于随机化信号的编码方式;
49、通过识别pn码,计算出北斗卫星信号的传播延迟和多普勒频移信息;
50、基于pn码和北斗卫星信号,计算出伪距和伪尺度;
51、其中,伪距为从北斗卫星到北斗卫星导航接收器之间的物理距离;
52、伪尺度为从北斗卫星导航接收器指向北斗卫星方向的角度;
53、基于伪距和伪尺度,对北斗卫星的位置和状态进行估计,确定北斗卫星速度,计算出北斗卫星的位置和速度后,提取和译码北斗卫星的导航电文;
54、其中,导航电文包括北斗卫星的时间戳、原子钟误差及服务信息;
55、基于北斗卫星的位置、速度及时间戳,确定北斗卫星导航数据。
56、优选的,从北斗卫星信号中提取pn码,包括:
57、将北斗卫星信号与北斗卫星的参考信号进行同步,在北斗卫星导航接收器上设置一个本地化的pn码序列,且使其与北斗卫星的pn码序列相匹配;
58、对北斗卫星信号进行去偏振处理,消除地球磁场导致的北斗卫星信号失真;
59、对北斗卫星信号进行降噪处理,消除北斗卫星信号中的噪声和杂波;
60、对北斗卫星信号进行调制处理,去除北斗卫星信号中除pn码外的所有频率调制成分,进而提取pn码。
61、优选的,所述信号处理模块,还包括:
62、数据优化单元,用于对北斗卫星导航数据进行清洗优化;
63、获取解码后的北斗卫星导航数据;
64、对解码后的北斗卫星导航数据进行清洗优化,包括:
65、对北斗卫星导航数据进行一致性检查;
66、根据数据一致性要求,检查北斗卫星导航数据中是否含有对车载单北斗定位无用的不一致数据,且去除北斗卫星导航数据中的不一致数据;
67、对北斗卫星导航数据进行无效值及缺失值检查;
68、根据数据有效性及完整性要求,检查北斗卫星导航数据中是否含有对车载单北斗定位无用的无效值及缺失值,且去除北斗卫星导航数据中的无效值及缺失值;
69、确定对车载单北斗定位有用的北斗卫星导航数据。
70、优选的,所述位置计算模块,包括:
71、方案制定单元,用于制定车辆位置计算方案;
72、获取对车载单北斗定位有用的北斗卫星导航数据;
73、对车载单北斗定位有用的北斗卫星导航数据进行分析,制定车辆位置计算方案;
74、位置计算单元,用于对车辆位置进行精准计算;
75、获取车辆位置计算方案;
76、基于车辆位置计算方案对车辆位置进行精准计算。
77、优选的,对车辆位置进行精准计算,执行以下操作:
78、采用基于距离的最近邻算法计算车辆位置信息;
79、对于当前车辆,将其与所有参考站进行比较,并计算它们之间的距离,选择距离之和最小的车辆作为当前假设车辆;
80、根据当前假设车辆的位置和北斗卫星导航数据,使用基于距离的最近邻算法更新假设车辆的位置,并选择新的候选车辆,依次循环,直到满足停止条件;
81、当达到停止条件时,输出假设车辆的最后位置,即车辆的实际位置,进而计算出车辆位置信息。
82、与现有技术相比,本发明的有益效果是:
83、本发明通过北斗卫星导航接收器接收来自北斗卫星向地面发送的信号,确定北斗卫星信号,通过处理器对北斗卫星信号进行解码处理,确定北斗卫星导航数据,且对北斗卫星导航数据进行清洗优化,对北斗卫星导航数据进行分析,制定车辆位置计算方案,基于车辆位置计算方案对车辆位置进行精准计算,确定车辆位置信息,通过存储器存储北斗卫星信号及车辆位置信息,该车载单北斗定位终端系统,体积小,重量轻,易于安装和使用,且具有较高的精度和可靠性,可以有效地提高车辆的安全性和运行效率,提升使用效果。
本文地址:https://www.jishuxx.com/zhuanli/20250110/355219.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表