一种电力线路杆塔倾斜及姿态监测与预警方法与流程
- 国知局
- 2025-01-17 13:07:45
本发明涉及摄影测量,具体涉及一种电力线路杆塔倾斜及姿态监测与预警方法。
背景技术:
1、电力线路杆塔是电力传输系统的关键组成部分,其稳定性直接影响到电力供应的安全和可靠性。电力线路杆塔的地基不稳,河流冲刷、风蚀等自然现象所导致的地基土壤流失,强风、洪水、地震等自然灾害,都会导致电力线路杆塔倾斜。如果不及时发现和处理杆塔倾斜问题,可能导致杆塔倒塌、线路断裂,甚至引发大范围停电事故。
2、电力线路杆塔倾斜检测方法主要是是用无人机进行巡检,通过无人机采集的杆塔图像并利用摄影测量技术测量出杆塔的在不同视角的倾斜角度,并对杆塔的姿态进行长时间检测,对可能存在的危险情况(例如倾斜角度较大的情况,或者倾斜角度在短时间内出现较大变化的情况)进行及时预警。
3、然而在使用无人机进行巡检电力线路杆塔时,天气地形原因(例如云层、雾气、山体树木等对光线的遮挡)导致无人机采集的杆塔图像无法检测出杆塔上所有关键位置的结构特征,尤其是远距离测量杆塔整体倾斜情况时,导致摄影测量出的倾斜角度具有误差,尤其不利于发现杆塔在短时间内的较小的姿态变化情况,不利于危险预警,例如强风、地震后杆塔危险姿态变化的预警。
技术实现思路
1、为解决上述问题,本发明提供一种电力线路杆塔倾斜及姿态监测与预警方法。
2、本发明的一种电力线路杆塔倾斜及姿态监测与预警方法采用如下技术方案:
3、本发明一个实施例提供了一种电力线路杆塔倾斜及姿态监测与预警方法,该方法包括以下步骤:
4、无人机飞略杆塔时在不同角度采集的图像记为视角图像;
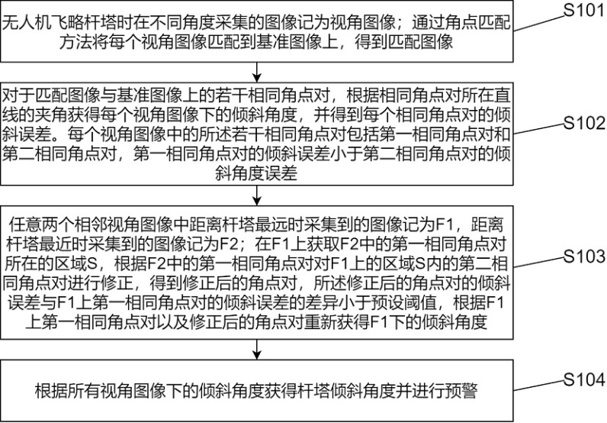
5、对每个视角图像进行直方图均衡化处理后,通过角点匹配方法将每个视角图像匹配到基准图像上得到匹配图像,对于匹配图像与基准图像上的若干相同角点对,根据相同角点对所在直线的夹角获得每个视角图像下的倾斜角度,并得到每个相同角点对的倾斜误差;
6、每个视角图像中的所述若干相同角点对包括第一相同角点对和第二相同角点对,第一相同角点对的倾斜误差小于第二相同角点对的倾斜误差;
7、任意两个相邻的视角图像中,距离杆塔最远时采集到的图像记为f1,距离杆塔最近时采集到的图像记为f2;
8、在f1上获取f2中的第一相同角点对所在的区域s,对区域s进行直方图均衡化处理后,根据f2中的第一相同角点对对f1上的区域s内的第二相同角点对进行修正,得到修正后的角点对,修正后的角点对的倾斜误差与f1上第一相同角点对的倾斜误差的差异小于预设阈值;根据f1上第一相同角点对以及修正后的角点对重新获得f1下的倾斜角度;
9、所述杆塔姿态包括所有视角图像下的倾斜角度,根据所有视角图像下的倾斜角度获得杆塔倾斜角度并对进行预警。
10、优选的,所述根据相同角点对所在直线的夹角获得每个视角图像下的倾斜角度,并得到每个相同角点对的倾斜误差,包括的具体步骤如下:
11、对于匹配图像与基准图像上的任意一个相同角点对p=(a,b),其中a表示匹配图像上的角点,b表示基准图像上的角点,a、b是互相匹配的角点;
12、将相同角点对p之外的任意一个其他相同角点对记为参考角点对,记为p1=(a1,b1),其中a1表示匹配图像上的角点,b1表示基准图像上的角点,a1、b1是互相匹配的角点;
13、获取a、a1所在的直线与b、b1所在的直线的夹角,记为任意一个相同角点对p相对于每个参考角点对的倾角;
14、对于相同角点对p之外的所有参考角点对,相同角点对p相对于所有参考角点对的倾角的均值记为相同角点对p的观测倾角;
15、所有相同角点对的观测倾角的均值记为每个视角图像下的倾斜角度;
16、每个相同角点对的观测倾角与每个视角图像下的倾斜角度的差异记为每个相同角点对的倾斜误差。
17、优选的,所述第一相同角点对和第二相同角点对的具体步骤如下:
18、倾斜误差小于th1的相同角点对记为第一相同角点对,倾斜误差大于等于th1的相同角点对记为第二相同角点对,th1为第一预设阈值。
19、优选的,所述在f1上获取f2中的第一相同角点对所在的区域s,包括的具体步骤如下:
20、通过角点匹配算法在f1上获得与f2中的第一相同角点对相匹配的角点,记为目标角点,将所有目标角点的邻域所构成的区域记为区域s。
21、优选的,所述根据f2中的第一相同角点对对f1上的区域s内的第二相同角点对进行修正,得到修正后的角点对,包括的具体步骤如下:
22、s1:在f1上对区域s内的像素点进行角点检测,得到的角点记为初始修正角点,将初始修正角点与基准图像中的角点进行匹配,得到若干初始修正角点对,f1上的第一相同角点对以及初始修正角点对中的相同角点记为更新角点对,根据更新角点对重新获得第一相同角点对和第二相同角点对,所获得的第一相同角点对和第二相同角点对分别记为相同角点对q1、相同角点对q2,相同角点对q2的综合误差与相同角点对q1的综合误差的差异记为a;根据a将th1的取值调低,得到更新后的th1;根据更新后的th1重新获得f2中的第一相同角点对;重新在f1上获取f2中的第一相同角点对所在的区域s,并对区域s进行直方图均衡化处理;
23、s2:重复执行s1,直至a小于等于预设阈值时停止,当a小于等于预设阈值时,得到的相同角点对q2就是修正后的角点对。
24、优选的,所述相同角点对q2的综合误差等于相同角点对q2中所有倾斜误差的均值;所述相同角点对q1的综合误差等于相同角点对q1中所有倾斜误差的均值。
25、优选的,所述根据a将th1的取值调低,得到更新后的th1,包括的具体公式为:
26、更新后的th1的取值用tt表示,tt=(1-a/90)×th1。
27、优选的,所述匹配图像与基准图像上的若干相同角点对的具体获取步骤如下:
28、利用sift角点检测算法获得视角图像与基准图像上的所有角点,使用归一化互相关匹配算法将视角图像中的角点与基准图像中的角点进行匹配,得到若干相互匹配的角点对,利用相互匹配的角点对将视角图像仿射变换得到匹配图像,所述若干相互匹配的角点对作为匹配图像与基准图像上的若干相同角点对。
29、优选的,所述杆塔倾斜角度为所有视角图像下的倾斜角度的最大值。
30、优选的,所述预警包括:
31、当杆塔的塔倾斜角度大于第二预设阈值,或者同一个杆塔在相邻两次无人机巡检过程中得到的塔倾斜角度的差异大于第三预设阈值时,进行报警。
32、本发明的技术方案的有益效果是:
33、本发明中每个视角图像中的第一相同角点对的倾斜误差小于第二相同角点对的倾斜误差;在f1上获取f2中的第一相同角点对所在的区域s,对区域s进行直方图均衡化处理后,根据f2中的第一相同角点对对f1上的区域s内的第二相同角点对进行修正,得到修正后的角点对,修正后的角点对的倾斜误差与f1上第一相同角点对的倾斜误差的差异小于预设阈值;根据f1上第一相同角点对以及修正后的角点对重新获得f1下的倾斜角度;该过程通过相距杆塔较近的视角图像(也即f2)中的具有较小误差的杆塔结构特征(也即f2中的第一相同角点对)获得局部区域s,使得局部区域s内包含有较小误差的杆塔结构特征,通过重新对s进行均衡化处理,并对相距杆塔较远的视角图像(也即f1)中的s内的具有较大误差的杆塔结构特征(也即f1中的第二相同角点对)进行修正,提高了f1中杆塔结构特征获取的准确性,进一步避免了光照不均匀导致的杆塔结构特征不明显或不准确的问题,进而提高了f1的倾斜角度的准确性,减少了杆塔倾斜角度的测量误差。
本文地址:https://www.jishuxx.com/zhuanli/20250117/356253.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。