智能化液态料饲喂方法及系统与流程
- 国知局
- 2024-07-12 12:46:51
本申请属于液态料饲喂,具体涉及一种智能化液态料饲喂方法及系统。
背景技术:
1、随着生猪养殖企业要求越来越高,为了提高经济效益,降本增效。养殖企业需要找寻一种节省人力,生猪肉料比较高的饲喂养殖方式。智能化饲喂系统逐渐开始在国内萌芽。又因为液态料的饲喂方式可减少粉尘和干物质的输送浪费,同时可降低生猪因消化不良引起的疾病,智能化的饲喂系统逐渐以液态料饲喂方式为主,一套智能化的液态料饲喂系统可满足8000头猪所有的规模,非常符合当下大型养殖企业的规模。
2、现有的液态料饲喂系统一般会沿出料管道依次设置多个出料机构(例如落料阀),用于不同畜舍的下料饲喂。由于各畜舍生猪数量和质量都不同,为了符合饲喂曲线,需要对每个畜舍的投喂量进行精确计算,通常利用设置在搅拌缸下部的称重传感器反馈出下料量,从而对出料机构(落料阀)进行控制。但是由于搅拌缸工作的震动,以及液体的惯性可会导致出现落料误差,即各畜舍的出料机构在出料时,并不能精准控制出料量,当称重传感器检测到重量变化,再给落料阀关闭指令,这个过程会有料液继续流出落料阀,造成落料误差。当落料误差累积较多时,会使得原本精准计算的饲喂量,不足以饲喂全部生猪。
技术实现思路
1、为此,本申请提供一种智能化液态料饲喂方法及系统,有助于解决现有液态料饲喂系统落料误差较大,实际饲喂量不符合饲喂曲线的问题。
2、为实现以上目的,本申请采用如下技术方案:
3、第一方面,本申请提供一种智能化液态料饲喂方法,应用于液态料饲喂装置,所述液态料饲喂装置包括搅拌机构、称重传感器、出料机构和至少两个食槽,所述饲喂方法包括:
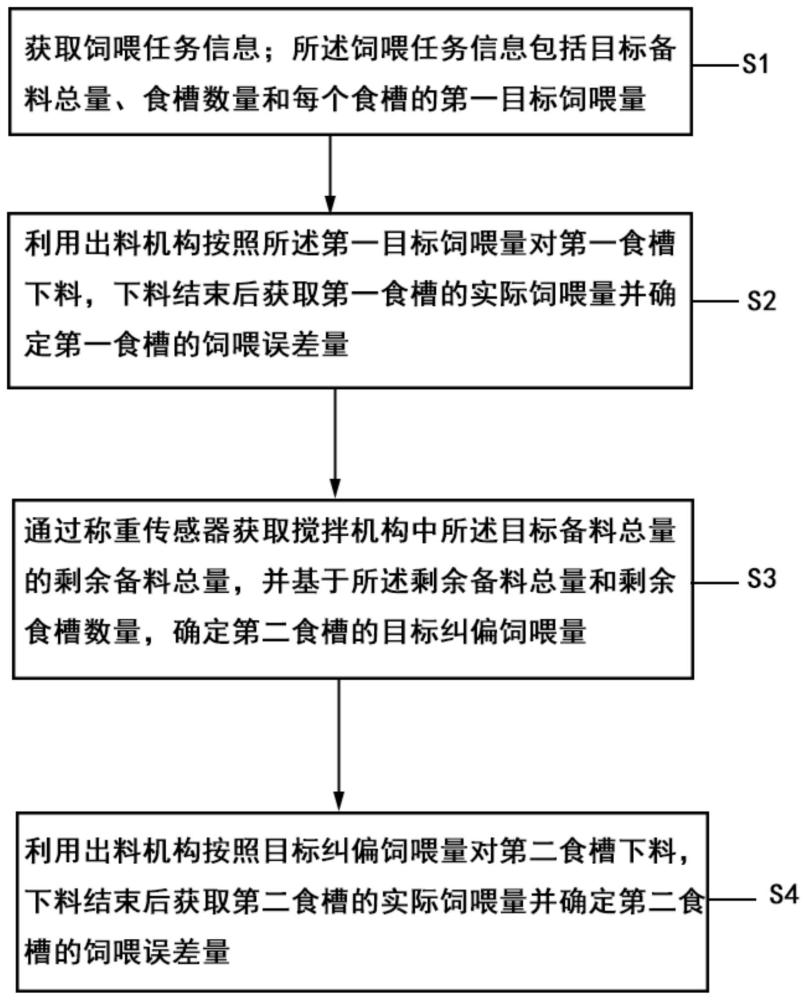
4、获取饲喂任务信息;所述饲喂任务信息包括目标备料总量、食槽数量和每个食槽的第一目标饲喂量;
5、利用出料机构按照所述第一目标饲喂量对第一食槽下料,下料结束后获取第一食槽的实际饲喂量并确定第一食槽的饲喂误差量;
6、通过称重传感器获取搅拌机构中所述目标备料总量的剩余备料总量,并基于所述剩余备料总量和剩余食槽数量,确定第二食槽的目标纠偏饲喂量;
7、利用出料机构按照目标纠偏饲喂量对第二食槽下料,下料结束后获取第二食槽的实际饲喂量并确定第二食槽的饲喂误差量。
8、进一步地,所述方法还包括:
9、获取下一次饲喂任务中的每个食槽的第二目标饲喂量,并依据当前饲喂任务中计算出的每个食槽的饲喂误差量,对下一次饲喂任务中的目标备料总量和对应每个食槽的第二目标饲喂量分别进行补偿修正。
10、进一步地,所述下料结束后获取第一食槽的实际饲喂量并确定第一食槽的饲喂误差量,具体包括:
11、通过出料机构获取到第一食槽下料结束后的实际饲喂量,并将所述实际饲喂量与所述第一目标饲喂量进行比较,计算出所述实际饲喂量与所述第一目标饲喂量之间的差值,根据差值确定第一食槽的饲喂误差量。
12、进一步地,所述基于所述剩余备料总量和剩余食槽数量,确定第二食槽的目标纠偏饲喂量,具体包括:
13、将剩余备料总量除以剩余食槽数量,求取剩余每个食槽的液态料饲喂量均值,以液态料饲喂量均值作为第二食槽的目标纠偏饲喂量。
14、进一步地,所述获取第二食槽的实际饲喂量并确定第二食槽的饲喂误差量,具体包括:
15、通过出料机构获取第二食槽下料结束后的实际饲喂量,并将第二食槽的实际饲喂量与所述第一目标饲喂量进行比较,计算出第二食槽的实际饲喂量与所述目标纠偏饲喂量之间的差值,根据差值确定第二食槽的饲喂误差量。
16、进一步地,所述饲喂任务中还设置有液态料冗余量,所述液态料冗余量小于所述目标备料总量,用于饲喂不相邻的食槽。
17、第二方面,本申请还提供了一种智能化液态料饲喂系统,包括:
18、液态料饲喂装置、液态料饲喂控制器、上位机终端和云服务器;
19、所述液态料饲喂装置,用于依据所述液态料饲喂控制器下发的控制指令进行下料,以及获取每个食槽的实际饲喂量和监控液态料的剩余量;
20、所述液态料饲喂控制器用于执行第一方面的智能化液态料饲喂方法中的各个步骤;
21、所述上位机终端用于设置饲喂任务信息,获取每个食槽的实际饲喂量和监控目标备料总量的剩余量,以及将饲喂任务信息、每个食槽的实际饲喂量和目标备料总量的剩余量上传至所述云服务器;
22、所述云服务器用于存储饲喂任务信息、每个食槽的实际饲喂量和目标备料总量的剩余量。
23、进一步地,所述上位机终端具体包括液态料控制主机和手动控制操作板;所述液态料饲喂控制器分别与液态料控制主机和手动控制操作板连接;所述液态料控制主机与所述云服务器连接。
24、本申请采用以上技术方案,至少具备以下有益效果:
25、通过本申请提供的一种智能化液态料饲喂方法,该方法应用于液态料饲喂装置,液态料饲喂装置包括搅拌机构、称重传感器、出料机构和至少两个食槽。其中,饲喂方法先获取目标备料总量、食槽数量和每个食槽的第一目标饲喂量等饲喂任务信息。对食槽进行下料时,通过获取每个食槽的实际饲喂量,计算并统计每个食槽的饲喂误差量,以便在下一次饲喂任务中按照每个食槽的饲喂误差量对每个食槽的下料量进行补足,确保每个食槽的实际饲喂量符合饲喂曲线,实现定时定量的饲喂效果。同时,在按照出料机构的下料顺序对每个食槽下料时,先按照第一目标饲喂量对第一食槽下料结束后,通过称重传感器获取搅拌机构中的剩余备料总量,并基于剩余备料总量和剩余食槽数量,确定第二食槽的目标纠偏饲喂量,在利用出料机构按照目标纠偏饲喂量对第二食槽下料,通过根据当前食槽饲喂误差量对下一食槽的目标饲喂量进行动态纠偏,可以缩小每个食槽的饲喂误差,确保每个食槽都能达到或高度接近预定的液态料目标饲喂量。
26、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种智能化液态料饲喂方法,应用于液态料饲喂装置,所述液态料饲喂装置包括搅拌机构、称重传感器、出料机构和至少两个食槽,其特征在于,所述饲喂方法包括:
2.根据权利要求1所述的智能化液态料饲喂方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的智能化液态料饲喂方法,其特征在于,所述下料结束后获取第一食槽的实际饲喂量并确定第一食槽的饲喂误差量,具体包括:
4.根据权利要求1所述的智能化液态料饲喂方法,其特征在于,所述基于所述剩余备料总量和剩余食槽数量,确定第二食槽的目标纠偏饲喂量,具体包括:
5.根据权利要求1所述的智能化液态料饲喂方法,其特征在于,所述获取第二食槽的实际饲喂量并确定第二食槽的饲喂误差量,具体包括:
6.根据权利要求1所述的智能化液态料饲喂方法,其特征在于,所述饲喂任务中还设置有液态料冗余量,所述液态料冗余量小于所述目标备料总量,用于饲喂不相邻的食槽。
7.一种智能化液态料饲喂系统,其特征在于,包括:
8.根据权利要求7所述的智能化液态料饲喂系统,其特征在于,所述上位机终端具体包括液态料控制主机和手动控制操作板;所述液态料饲喂控制器分别与液态料控制主机和手动控制操作板连接;所述液态料控制主机与所述云服务器连接。
技术总结本申请提供一种智能化液态料饲喂方法及系统,属于液态料饲喂技术领域。方法先获取饲喂任务中的目标备料总量、食槽数量和每个食槽的第一目标饲喂量;然后按照第一目标饲喂量对第一食槽下料,下料结束后获取第一食槽的实际饲喂量并确定第一食槽的饲喂误差量;获取目标备料总量的剩余备料总量,并基于剩余备料总量和剩余食槽数量,确定第二食槽的目标纠偏饲喂量。再按照目标纠偏饲喂量对第二食槽下料,下料结束后获取第二食槽的实际饲喂量并确定第二食槽的饲喂误差量。本申请通过根据当前食槽饲喂误差量对下一食槽的目标饲喂量进行动态纠偏,可以缩小每个食槽的饲喂误差,确保每个食槽的实际饲喂量符合饲喂曲线,达到定时定量的饲喂效果。技术研发人员:李春雷,和钰槟,魏传祺,李亚茹受保护的技术使用者:北京楚基伟业科技有限公司技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240614/100855.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表