大跨径异形钢桁架施工装置及其施工方法与流程
- 国知局
- 2024-07-10 18:17:43
本发明涉及钢桁架施工,特别是大跨径异形钢桁架施工装置及其施工方法。
背景技术:
1、随着我国城市化进程的快速推进,城市地面土地面积已无法完全满足进一步发展的需要,为应对城市建筑空间不足问题,城市建筑逐渐向高空、大跨径发展,钢桁架作为大跨度建筑的关键构件,其施工质量直接影响建筑整体质量及安全。
2、传统的钢桁架高空安装时需要在安装的钢桁架下方搭设满堂脚手架作为安装钢桁架的临时支撑体系,该临时支撑体系在安装钢桁架全过程中承担结构自重及施工荷载,并通过现场拼装完成钢桁架的安装,由于需要搭设临时支撑体系,使得过多的高空拼装在安全性和施工速度等方面均较难保证,并且安装及拆除较为复杂,不仅耽误施工进度,而且浪费材料,使用过后的材料不能够再次利用,因此,研究一种新的大跨径异形钢桁架施工装置及其施工方法来解决上述问题具有重要意义。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述和/或现有的钢桁架施工存在的问题,提出了本发明。
3、因此,本发明所要解决的技术问题是由于需要搭设临时支撑体系,使得过多的高空拼装在安全性和施工速度等方面均较难保证,并且安装及拆除较为复杂,不仅耽误施工进度,而且浪费材料,使用过后的材料不能够再次利用的问题。
4、为实现上述目的,本发明提供如下技术方案:大跨径异形钢桁架施工装置及其施工方法,包括,
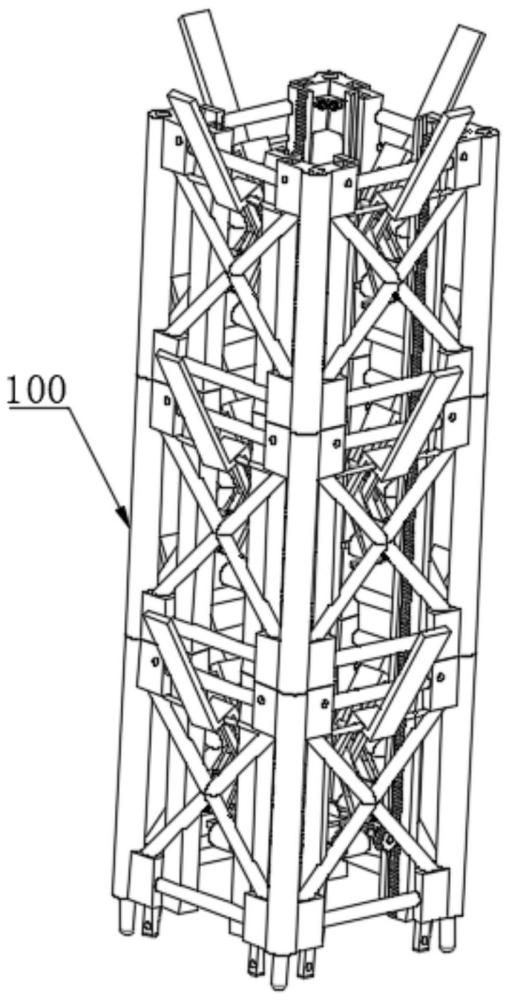
5、架设机构,多组架设机构依次纵向堆列,且每个架设机构包括支撑架;每个支撑架的四面均装配有摆正组件,支撑架底部的四角均固连有两个孔板,支撑架的顶部四角均开设有两个连接口;连接口的两侧连通有两个通口,通口开设在支撑架上,相邻的两个通口中设有锁定组件;锁定组件从两个孔板穿过,锁定组件固连在支撑架的内部,支撑架的内部固连有四个齿杆;
6、驱动机构,包括驱动组件,驱动组件设于最下方的支撑架中,驱动组件与两个传动组件啮合连接,传动组件的两端与两个齿杆啮合连接,两个传动组件和驱动组件均固连在导向组件上,导向组件设在支撑架的内部,导向组件的两侧均固连有两个齿板。
7、作为本发明的进一步方案:摆正组件包括摆正板,摆正板通过销轴转动连接在支撑架上,摆正板的底部固连有支撑轴,支撑轴滑动在开口中,开口开设在活动板上,活动板的下方通过销轴转动连接在两个固定块上,两个固定块固连在支撑架上,两个固定块之间均固连有扭簧,两个扭簧的一端与活动板固连,扭簧套设在销轴外。
8、作为本发明的进一步方案:锁定组件包括固定板,固定板固连在支撑架的内壁上,固定板上通过两个轴承转动连接有两个螺杆,螺杆的一端固连有第四齿轮,螺杆外螺纹连接有螺纹筒,螺纹筒从通口中穿过并进入孔板中。
9、作为本发明的进一步方案:螺纹筒的两侧均开设有凹槽,螺纹筒通过两个凹槽滑动连接在两个限位条上,两个限位条固连在一个通口中。
10、作为本发明的进一步方案:导向组件包括两个导向板,两个导向板的两端为燕尾部,燕尾部滑动连接在燕尾槽中,燕尾槽开设在支撑架的内壁上。
11、作为本发明的进一步方案:两个的导向板之间固连有两个支撑条,两个支撑条和两个导向板上均固连有滚轮。
12、作为本发明的进一步方案:支撑架的底部固连有四个圆形柱,支撑架的底部开设有四个圆形口,圆形柱的大小与圆形口大小适配;孔板的大小与连接口大小适配。
13、作为本发明的进一步方案:驱动组件包括两个第一转轴,第一转轴通过轴承转动连接在导向板上,第一转轴上固连有第一齿轮,两个第一齿轮啮合,其中一个第一转轴与电机的输出轴固连,电机固连在其中一个导向板上。
14、作为本发明的进一步方案:传动组件包括第二转轴,第二转轴通过轴承转动连接在导向板上,第二转轴上固连有第二齿轮,第二齿轮与第一齿轮啮合,第二转轴的两端均固连有第三齿轮,第三齿轮与齿杆啮合连接,齿板的形状为l形,且齿板上设有两个齿段。
15、大跨径异形钢桁架施工装置的施工方法,包括以下步骤:
16、s1、钢结构吊装:
17、钢平台安装:安装履带吊行走平台,在竖向桁架下方设置支撑架,同时,在钢平台上部铺设路基箱,在钢路基箱顶板上加焊防滑钢条;
18、履带吊上钢平台:待钢平台安装及调平完毕后,履带吊爬行至履带吊行走平台,以便于钢结构吊装;
19、钢结构吊装:采用履带吊对网壳、楼层梁和竖向桁架进行吊装,钢结构吊装按序分块完成;
20、s2、临时支撑安装:
21、地面组装临时支撑结构,首先,对最下方的支撑架进行定位,并定位完毕后,采用吊装方式将另一支撑架起吊在最下方的支撑架上方;
22、操作电机控制第一转轴带动第一齿轮旋转,以使得导向组件向上攀爬;
23、当滚轮向上接触活动板,使滚轮挤压活动板转动,活动板通过开口带动支撑轴和摆正板旋转,四个摆正板相互摆正竖立并贴合在上分支撑架,并使两个支撑架对齐;
24、继续下吊支撑架,使两个支撑架贴合,孔板插入连接口,使驱动组件继续运动,使导向组件继续向上攀爬,直至齿板与第四齿轮传动;
25、第四齿轮带动螺杆与螺纹筒传动,使螺纹筒穿入孔板,使两个支撑架固定,使导向组件继续上移可沿着齿杆进入上方的支撑架,依次进行组装使用;
26、待支撑架安装完毕后,完成设置在钢平台上的支撑架底部与钢平台的装配;
27、s3、钢结构预拼装:
28、实体预拼装:根据构件立面布置图结合预拼装范围绘制地样线,经检测地样线合格后,根据胎架与构件接触部位与地样线之间的关系,确定胎架的位置及其高度尺寸;
29、采用水准仪测量调整胎架横梁的水平度,并标识各控制点,各控制点标识完毕后,对成品构件进行完整组装,并对预拼装后的构件进行调整;
30、虚拟预拼装:通过在待扫描构件上粘贴磁性贴片,利用3d扫描技术获取构件模型,并将其导入模拟软件进行虚拟预拼装,以模拟实际拼装效果,从而依据模拟结果调整构件参数;
31、s4、现场拼装:
32、钢结构现场拼装:构件完成预拼装且进场后,对钢结构进行起吊与拼装;
33、拼装前测量:在钢结构拼装立体组合支撑架设置完成开始进行拼装前,对胎架的尺寸参数进行测量校正,并完成各空间位置放线及限位块布置;
34、拼装过程测量:钢结构拼装过程中对每一根弦杆及弦杆间连杆一一进行测量定位;
35、拼装结束后测量:拼装完成后,利用全站仪对结构进行全方位监测和校对,以确保与设计状态相符;
36、s5、待结构安装完毕后,根据钢材厚度、坡口形式和材质,对钢结构进行焊前预热并对钢结构进行焊接,以此完成施工作业。
37、与现有技术相比,本发明的有益效果在于:
38、1.本发明通过电机驱动第一转轴旋转,第一转轴带动第一齿轮运动,两个第一齿轮传动可与两个第二齿轮传动,使第二齿轮带动第二转杆运动,第二转杆带动第三齿轮与齿杆传动,使第三齿轮沿着齿杆向上进行攀爬,使传动组件可带动导向组件向上攀爬,使滚轮向上运动并与活动板接触,使滚轮挤压活动板转向,活动板通过开口带动支撑轴活动,使支撑轴带动摆正板进行转向,使四个摆正板摆正竖立可贴合支撑架,并通过持续施力可对支撑架进行矫正,保持两个支撑架准确对应,从而利于支撑架的对接组装作业,而且可自动对准,提高施工效率;
39、2.本发明通过电机驱动第一转轴转动,使两个第一齿轮进行传动,第一齿轮与第二齿轮传动驱动第二转轴旋转,第二转轴带动第三齿轮与齿杆传动,使第三齿轮沿着齿杆向上进行攀爬运动,从而可提升导向组件的高度,使滚轮向上运动可挤压活动板转向,活动板通过开口和支撑轴带动摆正板矫正支撑架,当齿板与第四齿轮传动时,使第四齿轮带动螺杆与螺纹筒传动,螺纹筒旋入孔板中,从而可自动对支撑架进行固定,而且由于上下两个齿杆对接,使驱动机构可顺利向上攀爬进入上方的支撑架,以此可对支撑架进行逐个安装作业,从而可加快施工进度和安全性,而且采用此方式,满足快速拆卸的作业,便于后续的使用;
40、3.本发明研发了一种履带吊上地下室顶板钢平台改良加固技术,提高钢平台稳定性与整体刚性,满足履带吊在钢平台上施工的安全性要求,提高了履带吊施工的安全性,同时,针对钢桁架临时支撑体系安装效率低、工期长、临时结构高空焊接困难等问题,本发明相较于传统钢桁架吊装与拼装技术,具有施工安全、快捷、经济和精度高等特点,在虚拟预拼装技术下指导的实体预拼装技术,可降低钢桁架多次预拼装成本,提高实体预拼装效率;
41、4.本发明相较于传统钢桁架吊装与拼装技术,具有施工安全、快捷、经济和精度高等特点,且在工程施工过程中,一方面该技术可简化大型构件吊装、钢桁架临时支撑体系安装和钢桁架预拼装的步骤,保证工程快速顺利进行,并且与单一实体预拼装技术相比,其次,与单一实体预拼装技术相比,在虚拟预拼装技术下指导的实体预拼装技术,可降低钢桁架多次预拼装成本,提高实体预拼装效率。
本文地址:https://www.jishuxx.com/zhuanli/20240615/67359.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表