一种长驻海底的采油树的水下机械臂运维装置的制作方法
- 国知局
- 2024-07-05 17:54:46
本发明海上油气勘探开采领域,具体涉及一种长驻海底的采油树的水下机械臂运维装置。
背景技术:
1、大规模海上油气勘探装置无法用于因航运和敏感区域无法通过建设导管架平台的方式进行开发的海洋油气田区域。按照海事要求不能有突出海底泥线的构筑物,为此国内外油气田公司提出了针对该类油气田的浅水隐蔽式水下基盘开发和设计思路,该基盘为一封闭区域,内部包含多个采油树,是一种新颖的水下油气田生产系统。因浅水隐蔽式水下基盘于泥面以下的封闭区域,浅水集成式水下生产设施的运维包括水下生产系统的安装辅助、热刺插拔、井口盘的阀门开关等作业,而传统作业方式存在以下问题:1、传统作业方式以潜水员为主,潜水员受海况影响较大、作业强度高,危险性大,效率低;2、传统作业方式施工时间长,潜水员的辅助支持成本高;3、近年来采用水下有缆遥控机器人进行作业,其操作难度高,受天气影响大,交叉作业常常不适合有缆遥控机器人作业,效率低。
技术实现思路
1、本发明是为了解决现有技术中存在的问题而提出的,其目的是提供一种长驻海底的采油树的水下机械臂运维装置。
2、本发明是通过以下技术方案实现的:
3、一种长驻海底的采油树的水下机械臂运维装置,包括:
4、框架机构,其为机械臂运维装置的主架构,用于为各种功能部件提供安装位;
5、滑移机构,其设置于框架机构下方,用于为机械臂提供水平方向的移动;
6、水下液压机构,其设置于框架机构上,用于实现滑移系统的平移和机械臂垂直方向的移动;
7、起升机构,其设置于框架机构上,用于机械臂对采油树操作盘的全覆盖操作;
8、辅助机构,其设置于框架机构内,用于清理滑移系统上的海生物和淤泥。
9、在上述技术方案中,所述框架机构包括基座和设置于基座顶面的吊放框架,所述吊放框架是由横纵连接的梁组成的长方型框架,且框架中间设置二层支撑梁。
10、在上述技术方案中,所述滑移机构包括轨道机构、设置于轨道机构上的滑移底盘以及移动马达;滑移底盘与框架机构的基座通过至少一个快速拆装接口结构连接;所述轨道机构包括平行设置的一条齿条轨道和两条工字型的平面轨道,且齿条轨道设置于两条平面轨道的中间;齿条轨道与设置于移动马达输出轴上的主动轮啮合。
11、在上述技术方案中,所述平面轨道上设置防止滑移底盘21受外力倾覆的凹槽。
12、在上述技术方案中,所述滑移底盘的四角均设置平面轮,且平面轮位于平面轨道上,平面轮内侧设置凸起面。
13、在上述技术方案中,所述水下液压机构设置于基座的底层,水下液压系统包括油源系统和阀箱。
14、在上述技术方案中,所述起升机构包括固定于基座上的起升导向座、设置于起升导向座上的起升油缸以及与起升油缸通过机械臂固定板连接的机械臂;
15、在上述技术方案中,所述起升机构还包括三根呈锐角三角形分布的起升导向柱,起升油缸设置于靠近起升导向柱围成的三角形顶角位置,起升导向柱穿过机械臂固定板;
16、在上述技术方案中,所述起升机构还包括至少一个功能组件,所述功能组件通过安装板设置于起升油缸顶部,所述功能组件包括云台以及设置于云台上的照明灯和摄像机,照明灯和摄像机位于吊放框架顶部上方。
17、在上述技术方案中,所述辅助机构包括绞车、高压水泵、工具篮和刮板;所述绞车设置于吊放框架的二层;所述工具篮固定于基座上,且靠近起升导向座设置,热刺和扭矩扳手放置于工具篮内;所述高压水泵设置于基座上,且位于机械臂14运动轨迹上;每个沿轨道运动方向的前后端均设置刮板。
18、本发明的有益效果是:
19、本发明提供了一种长驻海底的采油树的水下机械臂运维装置,作为浅水集成式水下生产设施在线运维的一部分,可替代部分潜水员的水下作业任务,在恶劣的天气和海况下,也可减少潜水员下水次数,保障潜水员安全性;运维装置自动化程度、工作效率及安全性均大大提高,可实现对水下多个采油树操作面板的阀门、热刺插拔的作业任务。
技术特征:1.一种长驻海底的采油树的水下机械臂运维装置,其特征在于:包括:
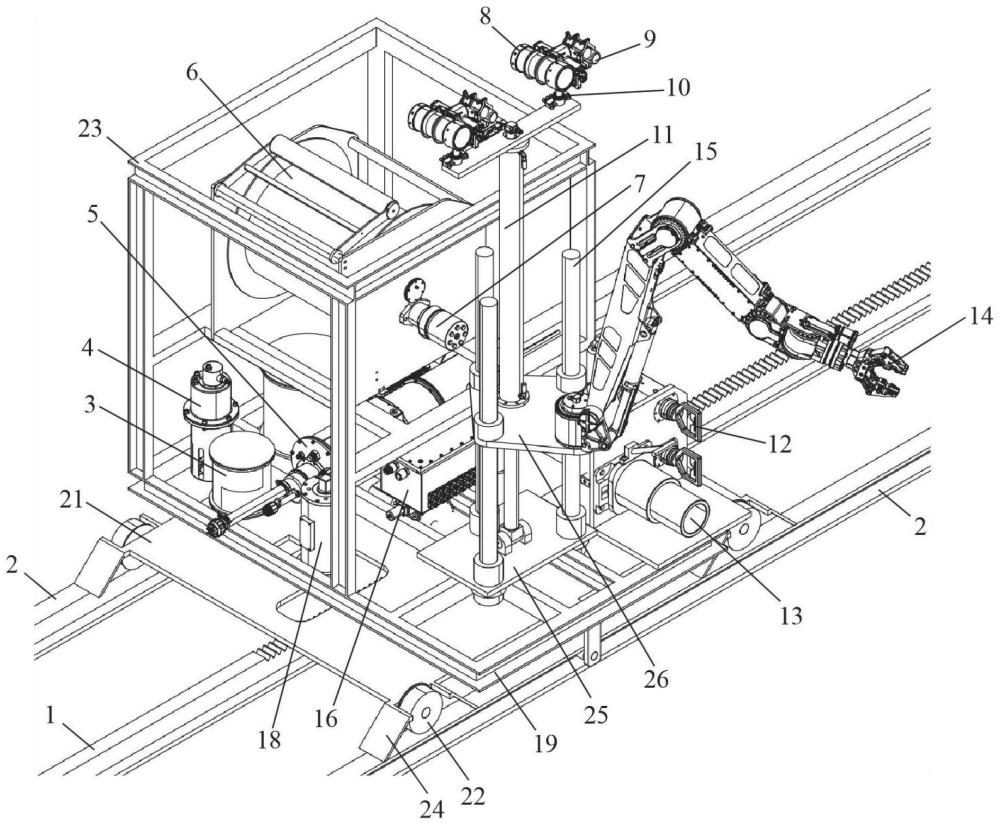
2.根据权利要求1所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述框架机构包括基座(19)和设置于基座(19)顶面的吊放框架(23),所述吊放框架(23)是由横纵连接的梁组成的长方型框架,且框架中间设置二层支撑梁。
3.根据权利要求1所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述滑移机构包括轨道机构、设置于轨道机构上的滑移底盘(21)以及移动马达(17);滑移底盘(21)与框架机构的基座(19)通过至少一个快速拆装接口结构(18)连接;所述轨道机构包括平行设置的一条齿条轨道(1)和两条工字型的平面轨道(2),且齿条轨道(1)设置于两条平面轨道(2)的中间;齿条轨道(1)与设置于移动马达(17)输出轴上的主动轮啮合。
4.根据权利要求3所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述平面轨道(2)上设置防止滑移底盘21受外力倾覆的凹槽。
5.根据权利要求3所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述滑移底盘(21)的四角均设置平面轮(22),且平面轮(22)位于平面轨道(2)上,平面轮(22)内侧设置凸起面。
6.根据权利要求1所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述水下液压机构设置于基座(19)的底层,水下液压系统包括油源系统(5)和阀箱(16)。
7.根据权利要求1所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述起升机构包括固定于基座(19)上的起升导向座(25)、设置于起升导向座(25)上的起升油缸(11)以及与起升油缸(11)通过机械臂固定板(26)连接的机械臂(14)。
8.根据权利要求7所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述起升机构还包括三根呈锐角三角形分布的起升导向柱(15),起升油缸(11)设置于靠近起升导向柱围成的三角形顶角位置,起升导向柱(15)穿过机械臂固定板(26)。
9.根据权利要求7所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述起升机构还包括至少一个功能组件,所述功能组件通过安装板设置于起升油缸(11)顶部,所述功能组件包括云台(10)以及设置于云台(10)上的照明灯(8)和摄像机(9),照明灯(8)和摄像机(9)位于吊放框架(23)顶部上方。
10.根据权利要求1所述的长驻海底的采油树的水下机械臂运维装置,其特征在于:所述辅助机构包括绞车(6)、高压水泵(20)、工具篮和刮板(24);所述绞车(6)设置于吊放框架(23)的二层;所述工具篮固定于基座(19)上,且靠近起升导向座(25)设置,热刺(12)和扭矩扳手(13)放置于工具篮内;所述高压水泵(20)设置于基座(19)上,且位于机械臂14运动轨迹上;每个沿轨道运动方向的前后端均设置刮板(24)。
技术总结本发明公开了一种长驻海底的采油树的水下机械臂运维装置,包括:框架机构,其为机械臂运维装置的主架构,用于为各种功能部件提供安装位;滑移机构,其设置于框架机构下方,用于为机械臂提供水平方向的移动;水下液压机构,其设置于框架机构上,用于实现滑移系统的平移和机械臂垂直方向的移动;起升机构,其设置于框架机构上,用于机械臂对采油树操作盘的全覆盖操作;辅助机构,其设置于框架机构内,用于清理滑移系统上的海生物和淤泥。本发明可替代部分潜水员的水下作业任务,在恶劣的天气和海况下,也可减少潜水员下水次数,保障潜水员安全性;运维装置自动化程度、工作效率及安全性均大大提高。技术研发人员:李勇,薛强,赵德喜,黄健虾,陈寿宝,张国军,吴飞,姜哲,罗高生,王斌受保护的技术使用者:中海油能源发展股份有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49629.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表