多自由度仿生灵巧手的制作方法
- 国知局
- 2024-07-08 10:44:17
本发明涉及机器人,尤其涉及多自由度仿生灵巧手。
背景技术:
1、机器人是当前研究热点之一,机器人的仿生手指是精密复杂的结构,在有限的空间内集成机械部件和电气部件,对仿生手指的抓握力、灵巧性、功能多样性产生一定的影响,因此,提高仿生手指的抓握力和灵巧性以及丰富仿生手指的功能性成为目前技术发展的难点之一。
2、现有的仿生手在手掌的掌壳设置五个电机,五个电机分别与五根仿生手指连接,从而控制五根仿生手指实现抓握动作,手指结构的各个指节之间由绳腱传动连接,手指结构中的各个指节只具有从动自由度,不具备独立动作的条件,灵巧性不够,抓握力不足,每根仿生手指只能往掌心方向弯曲,无法进行其他方向的动作,功能单一。
技术实现思路
1、本发明的目的在于:提供多自由度仿生灵巧手,使仿生灵巧手具有多个自由度,丰富仿生灵巧手的功能。
2、为达此目的,本发明采用以下技术方案:
3、多自由度仿生灵巧手,包括:
4、手掌结构;
5、仿生拇指,包括第一指节结构以及转盘,所述转盘转动设置于所述手掌结构,所述第一指节结构铰接于所述转盘,所述转盘的旋转轴线不平行于所述第一指节结构的旋转轴线;
6、多功能仿生手指,包括第二指节结构,所述第二指节结构万向铰接于所述手掌结构,所述第二指节结构能够进行曲张运动和摆动运动;
7、灵巧仿生手指,包括第三指节结构,所述第三指节结构铰接于所述手掌结构,所述第三指节结构能够进行曲张运动。
8、作为一种可选的技术方案,所述仿生拇指还包括第一线性电机,所述第一线性电机的两端分别铰接于所述转盘和所述第一指节结构,所述第一线性电机用于带动所述第一指节结构进行曲张运动。
9、作为一种可选的技术方案,所述仿生拇指还包括根部线性电机,所述根部线性电机的两端分别铰接于所述转盘和所述手掌结构,所述根部线性电机用于带动所述转盘在所述手掌结构上转动。
10、作为一种可选的技术方案,所述多功能仿生手指还包括两个第二线性电机,两个所述第二线性电机的两端均分别万向铰接于所述第二指节结构和所述手掌结构,两个所述第二线性电机用于带动所述第二指节结构进行曲张运动或摆动运动。
11、作为一种可选的技术方案,所述第二指节结构的根部通过球销副铰接于所述手掌结构,所述第二线性电机的一端通过第一球面副铰接于所述手掌结构,所述第二线性电机的另一端通过第二球面副铰接于所述第二指节结构的根部。
12、作为一种可选的技术方案,两个所述第一球面副的旋转中心对称设置于所述球销副的旋转中心的左右两侧;
13、两个所述第二球面副的旋转中心对称设置于所述球销副的旋转中心的左右两侧。
14、作为一种可选的技术方案,所述灵巧仿生手指还包括第三线性电机,所述第三线性电机的两端分别铰接于所述第三指节结构和所述手掌结构,所述第三线性电机用于带动所述第三指节结构进行曲张运动。
15、作为一种可选的技术方案,所述第一指节结构、所述第二指节结构以及所述第三指节结构均包括步进线性电机和至少两个指节,相邻两个所述指节之间转动连接,相邻两个所述指节之间设有所述步进线性电机,所述步进线性电机用于带动相邻两个所述指节相对转动。
16、作为一种可选的技术方案,所述第二指节结构与所述第三指节结构中的所述指节数目相同;或者
17、所述第一指节结构、所述第二指节结构以及所述第三指节结构中的所述指节数目相同。
18、作为一种可选的技术方案,所述手掌结构设置为l型结构,所述手掌结构上设有避让空间,所述避让空间用于避让安装于所述手掌结构的pcb。
19、本发明的有益效果在于:
20、本发明提供的多自由度仿生灵巧手包括手掌结构、仿生拇指、多功能仿生手指以及灵巧仿生手指;仿生拇指包括第一指节结构以及转盘,转盘转动设置于手掌结构,第一指节结构铰接于转盘,转盘能够带动第一指节结构相对手掌结构转动,能够模拟拇指做左右摆动动作,第一指节结构能够相对转盘转动,能够模拟拇指做弯曲握紧动作;多功能仿生手指包括第二指节结构,第二指节结构万向铰接于手掌结构,第二指节结构能够进行曲张运动和摆动运动;灵巧仿生手指包括第三指节结构,第三指节结构铰接于手掌结构,第三指节结构能够进行曲张运动。本发明的多自由度仿生灵巧手具有多个自由度,功能丰富。
技术特征:1.多自由度仿生灵巧手,其特征在于,包括:
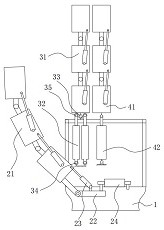
2.根据权利要求1所述的多自由度仿生灵巧手,其特征在于,所述仿生拇指(2)还包括第一线性电机(23),所述第一线性电机(23)的两端分别铰接于所述转盘(22)和所述第一指节结构(21),所述第一线性电机(23)用于带动所述第一指节结构(21)进行曲张运动。
3.根据权利要求1所述的多自由度仿生灵巧手,其特征在于,所述仿生拇指(2)还包括根部线性电机(24),所述根部线性电机(24)的两端分别铰接于所述转盘(22)和所述手掌结构(1),所述根部线性电机(24)用于带动所述转盘(22)在所述手掌结构(1)上转动。
4.根据权利要求1所述的多自由度仿生灵巧手,其特征在于,所述多功能仿生手指(3)还包括两个第二线性电机(32),两个所述第二线性电机(32)的两端均分别万向铰接于所述第二指节结构(31)和所述手掌结构(1),两个所述第二线性电机(32)用于带动所述第二指节结构(31)进行曲张运动或摆动运动。
5.根据权利要求4所述的多自由度仿生灵巧手,其特征在于,所述第二指节结构(31)的根部通过球销副(33)铰接于所述手掌结构(1),所述第二线性电机(32)的一端通过第一球面副(34)铰接于所述手掌结构(1),所述第二线性电机(32)的另一端通过第二球面副(35)铰接于所述第二指节结构(31)的根部。
6.根据权利要求5所述的多自由度仿生灵巧手,其特征在于,两个所述第一球面副(34)的旋转中心对称设置于所述球销副(33)的旋转中心的左右两侧;
7.根据权利要求1所述的多自由度仿生灵巧手,其特征在于,所述灵巧仿生手指(4)还包括第三线性电机(42),所述第三线性电机(42)的两端分别铰接于所述第三指节结构(41)和所述手掌结构(1),所述第三线性电机(42)用于带动所述第三指节结构(41)进行曲张运动。
8.根据权利要求1-7任一项所述的多自由度仿生灵巧手,其特征在于,所述第一指节结构(21)、所述第二指节结构(31)以及所述第三指节结构(41)均包括步进线性电机(100)和至少两个指节(200),相邻两个所述指节(200)之间转动连接,相邻两个所述指节(200)之间设有所述步进线性电机(100),所述步进线性电机(100)用于带动相邻两个所述指节(200)相对转动。
9.根据权利要求8所述的多自由度仿生灵巧手,其特征在于,所述第二指节结构(31)与所述第三指节结构(41)中的所述指节(200)数目相同;或者
10.根据权利要求1-7任一项所述的多自由度仿生灵巧手,其特征在于,所述手掌结构(1)设置为l型结构,所述手掌结构(1)上设有避让空间(11),所述避让空间(11)用于避让安装于所述手掌结构(1)的pcb。
技术总结本发明属于机器人技术领域,公开多自由度仿生灵巧手,多自由度仿生灵巧手包括手掌结构、仿生拇指、多功能仿生手指以及灵巧仿生手指,仿生拇指包括第一指节结构以及转盘,转盘转动设置于手掌结构,第一指节结构铰接于转盘,转盘的旋转轴线不平行于第一指节结构的旋转轴线;多功能仿生手指包括第二指节结构,第二指节结构万向铰接于手掌结构,第二指节结构能够进行曲张运动和摆动运动;灵巧仿生手指包括第三指节结构,第三指节结构铰接于手掌结构,第三指节结构能够进行曲张运动。本发明使仿生灵巧手具有多个自由度,能够丰富仿生灵巧手的功能。技术研发人员:郝仕权,王俊恒,李平受保护的技术使用者:深圳市兆威机电股份有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50008.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表