自动巡检消杀可视化机器人的制作方法
- 国知局
- 2024-07-08 10:48:38
本发明涉及牵引消毒机器人,尤其涉及自动巡检消杀可视化机器人。
背景技术:
1、消毒灭菌是部分机构预防与控制发生外源性感染的主要手段,是部分机构提高安全质量和保障安全的基础性工作,也是部分机构尤其是基层感染预防控制工作中的主要环节之一,在日常生活中较为常见。
2、现有技术诸如公告号为cn112546271b的发明,该专利公开了消毒机器人,该专利包括移动底盘、机器人本体、雾化喷雾组件、用于储存消毒液的储液组件,以及用于向外界环境发出消毒光的灯光组件;所述喷雾组件用于将所述储液组件中的消毒液雾化后并喷向外界环境;所述灯光组件、所述储液组件以及所述雾化喷雾组件均安装在所述机器人本体上;所述移动底盘安装在所述机器人本体底部上,且用于带动所述机器人本体移动。本发明中,该消毒机器人兼备消毒灯光消毒和消毒液消毒,提高了消毒机器人的消毒效果。
3、发明人在日常生活使用中发现,传统的巡检消杀机器人一般采用人工踩点或者随机性巡检的方式进行巡检,此时容易出现操作复杂或者是容易漏掉地方没有消杀,且一般情况下巡检结果也难以分辨,进而导致无法直观地让用户感受到巡检或者消杀效果的问题。
技术实现思路
1、本发明的目的是解决现有技术中存在传统地巡检消杀机器人一般采用人工踩点或者随机性巡检的方式进行巡检,此时容易出现操作复杂或者是容易漏掉地方没有消杀,且一般情况下巡检结果也难以分辨,进而导致无法直观地让用户感受到巡检或者消杀效果的缺点,而提出的自动巡检消杀可视化机器人。
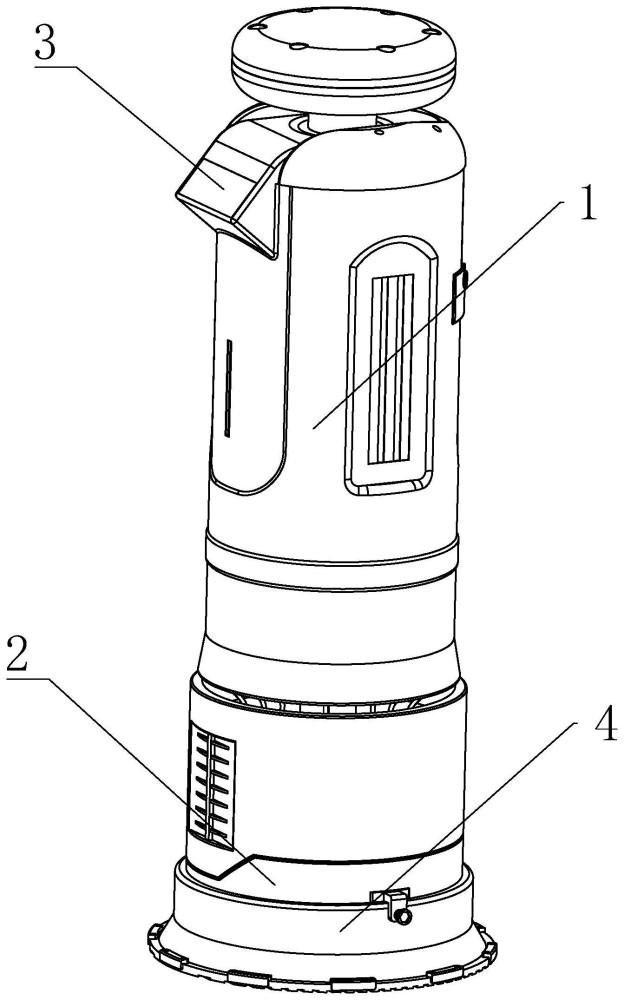
2、为了实现上述目的,本发明采用了如下技术方案:自动巡检消杀可视化机器人,包括机器人本体,所述机器人本体的底端安装有基座,所述机器人本体的上端安装有中控显示器,所述机器人本体的表面一侧设置有控制器,所述基座的底面设有调节装置,所述调节装置包括衔接框和限位组件。
3、上述部件所达到的效果为:传统的巡检消杀机器人一般采用人工踩点或者随机性巡检的方式进行巡检,此时容易出现操作复杂或者是容易漏掉地方没有消杀,且一般情况下巡检结果也难以分辨,进而导致无法直观地让用户感受到巡检或者消杀效果的情况,这时在对机器人进行消毒自动巡检使用过程中,将会利用机器人本体上的控制器进行操作,从而在机器人本体上的中控显示器上显示,而机器人本体底端的基座可以有效地进行消毒灭杀操作,在机器人本体位置移动的过程中,为了对机器人本体移动调节得更稳定,此时利用调节装置进行辅助操作限位。
4、优选的,所述衔接框与基座的底面固定连接,所述衔接框的表面开设有四个均匀分布的衔接孔,四个所述衔接孔的内壁底端均固定连接有固定框,所述固定框的内壁均固定连接有气缸,所述气缸的输出端均固定连接有转轴,所述转轴底面均转动连接有滚轮,所述滚轮的一侧均安装有固定连接的伺服电机,所述伺服电机的表面与气缸的表面均固定连接有电性连接线,所述电性连接线与基座的内壁电性连接。
5、上述部件所达到的效果为:在对整个机器人本体进行操作使用的过程中,为了更好的对机器人本体进行位置的调节移动,此时利用基座底面上固定的衔接框,利用衔接框内开设的衔接孔,让衔接孔内固定的固定框对气缸进行固定,再利用气缸输出端固定的转轴带动滚轮的升降与位置的调节,而滚轮一侧固定的伺服电机可以有效的对滚轮的转速进行调控,从而达到方便快捷的对整个机器人本体位置的限位。
6、优选的,所述滚轮的圆弧面均固定连接有防滑套,所述防滑套的圆弧面固定连接有若干个防滑块。
7、上述部件所达到的效果为:在对机器人本体位置进行移动调节时,为了避免滚轮在转动时发生打滑,此时利用滚轮上的防滑套进行增大摩擦,便于对滚轮更好的操作使用。
8、优选的,所述限位组件包括固定环,所述固定环的内壁与基座的底端圆弧面固定连接,所述固定环的上表面固定连接有第二弹簧,所述第二弹簧远离固定环的一端固定连接有定位框,所述定位框的内壁与基座的圆弧面滑动连接,所述基座的一侧圆弧面固定连接有连接块,所述连接块的截面呈“l”形,所述连接块的表面滑动贯穿有移动杆,所述移动杆的一端圆弧面与定位框的表面滑动贯穿,所述移动杆的圆弧面套有第一弹簧,所述第一弹簧的两端分别与移动杆个连接块固定连接。
9、上述部件所达到的效果为:在对机器人本体位置移动调节到指定的位置后,为了对机器人本体进行更好的固定限位,此时利用基座圆弧面上滑动的定位框进行辅助,通过固定环上第一弹簧所产生的拉力对整个定位框的位置进行拉伸挤压限位,而基座上固定的连接块,可以利用连接块上滑动贯穿的移动杆进行对定位框位置的固定限位,有效地对整个机器人本体进行便捷使用。
10、优选的,所述移动杆靠近连接块的一端固定连接有衔接柱,所述衔接柱的截面呈尖锥状。
11、上述部件所达到的效果为:在对移动杆的位置进行操作调节时,利用截面呈尖锥状的衔接柱可以便捷地对移动杆进行插接限位。
12、优选的,所述定位框的底端表面开设有若干个摩擦槽,若干个所述摩擦槽均匀分布在定位框底面。
13、上述部件所达到的效果为:利用定位框底端上开设的摩擦槽可以有效地增大摩擦,从而便于定位框抵接的更稳定。
14、优选的,所述定位框的圆弧面均匀固定连接有若干个镶嵌块,若干个所述镶嵌块均为橡胶块。
15、上述部件所达到的效果为:在对机器人本体的位置进行移动调节时,为了避免机器人本体发生意外磕碰,此时利用定位框上固定的橡胶材质镶嵌块进行辅助操作使用。
16、优选的,所述定位框为硬质合金框,所述定位框的截面呈圆弧状。
17、上述部件所达到的效果为:通过圆弧状的定位框可以便于分散磕碰时的挤压力,而采用硬质合金可以长时间地操作使用。
18、优选的,所述机器人本体的位置为起始点,所述机器人本体内部设置有高斯分布计算系统。
19、上述部件所达到的效果为:让机器人为起始点位,周围半径为2m(也可以是其他范围)的点为消杀面积,再通过高斯分布将周围一定范围内每一个点的消杀强度计算出来并保存到数组中,即可实现实时显示消杀面积强度。
20、优选的,所述中控显示器与高斯分布计算系统电性连接,所述中控显示器通过rgb实时显示。上述部件所达到的效果为:通过高斯分布将消杀强度计算出来并保存到数组中,再利用数字的大小转换成rgb色彩点,数字越大颜色浓度越深,再利用图形库将其显示在图上。
21、综上所述,本发明的有益效果为:
22、本发明中,传统的巡检消杀机器人一般采用人工踩点或者随机性巡检的方式进行巡检,此时容易出现操作复杂或者是容易漏掉地方没有消杀,且一般情况下巡检结果也难以分辨,进而导致无法直观地让用户感受到巡检或者消杀效果的情况,这时在对机器人进行消毒自动巡检使用过程中,将会利用机器人本体上的控制器进行操作,从而在机器人本体上的中控显示器上显示,而机器人本体底端的基座可以有效地进行消毒灭杀操作,在机器人本体位置移动的过程中,为了对机器人本体移动调节的更稳定,此时利用调节装置进行辅助操作限位,在对整个机器人本体进行操作使用的过程中,通过对调节装置的操作,达到了对机器人本体进行位置的调节移动,此时利用基座底面上固定的衔接框,利用衔接框内开设的衔接孔,让衔接孔内固定的固定框对气缸进行固定,再利用气缸输出端固定的转轴带动滚轮的升降与位置的调节,而滚轮一侧固定的伺服电机可以有效地对滚轮的转速进行调控,从而达到方便快捷地对整个机器人本体位置的限位。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50326.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表