运动空间受限的三轮全向移动机械臂重复运动规划方法及系统
- 国知局
- 2024-07-08 10:51:59
本发明涉及移动机械臂的运动规划及控制领域,尤其是涉及一种运动空间受限的三轮全向移动机械臂重复运动规划方法及系统。
背景技术:
1、由于兼备平台的可移动性和机械臂的可操作性,三轮全向冗余移动机械臂已广泛应用于工业、医疗、教育和军事等诸多领域。重复运动规划是三轮全向移动机械臂应用研究中的热点之一;即,在完成给定的末端操作任务后,移动平台和机械臂需要同时回到各自的初始状态。目前已有多种基于伪逆描述的重复运动规划方案被提出,并成功在三轮全向移动机械臂上得到应用。然而,这些方案是在不考虑移动机械臂物理约束(包括移动平台的位姿极限和机械臂的关节角度极限)情况下进行设计的。显然,它不适用于运动空间受限的三轮全向移动机械臂,自然也不能使得机械臂在有限的操作空间中成功完成重复性的末端任务。因此,在移动机械臂重复运动规划的研究中,考虑并实现物理约束的处理就显得非常有必要。
技术实现思路
1、本发明的目的是为了提供一种结构简单、容易实现、计算量少、运动空间受限情况下的三轮全向移动机械臂重复运动规划方法及系统。
2、本发明的目的可以通过以下技术方案来实现:
3、一种运动空间受限的三轮全向移动机械臂重复运动规划方法,包括以下步骤:
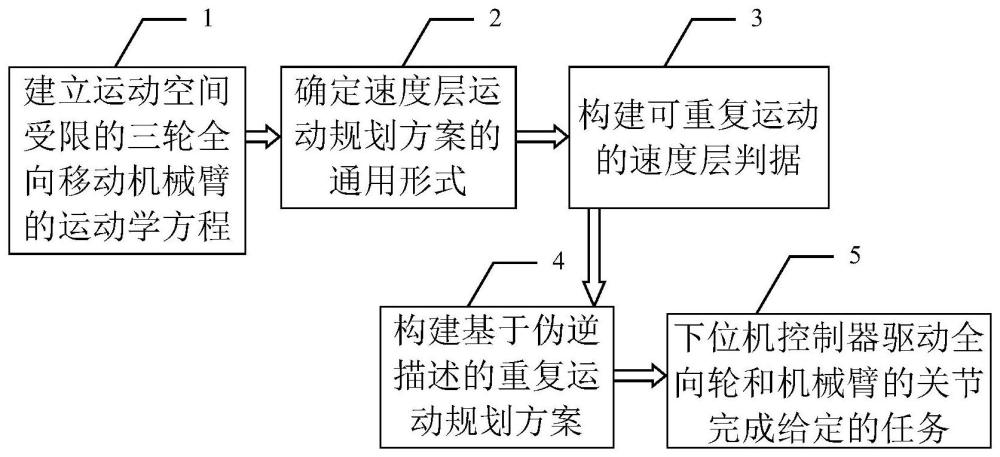
4、步骤1:考虑移动平台的位姿极限和机械臂的关节角度极限,建立三轮全向移动机械臂在运动空间受限情况下的运动学方程;
5、步骤2:将运动学方程转化为联合非线性方程组,确定三轮全向移动机械臂速度层运动规划方案的通用形式;
6、步骤3:构建可实现重复运动的速度层判据;
7、步骤4:基于速度层运动规划方案的通用形式和速度层判据,构建基于伪逆描述的重复运动规划方案;
8、步骤5:下位机控制器根据重复运动规划方案的计算结果驱动移动平台的三个全向轮和机械臂的关节完成给定的末端操作任务。
9、所述步骤1具体为:对于运动空间受限的三轮全向移动机械臂,根据denavit-hartenberg参数法进行运动学建模,同时考虑移动平台的位姿极限和机械臂的关节角度极限,建立运动学方程。
10、所述运动学方程为:
11、
12、其中,f(·)表示非线性映射函数,表示三轮全向移动机械臂的联合位置向量且定义为pxy∈r2表示移动平台在xy平面上的位置,即机械臂基座安装在移动平台的位置,φ∈r表示移动平台的朝向角,θ∈rn表示机械臂的关节角度,rd∈rm表示移动机械臂的末端在m维空间中期望的运动轨迹,表示移动机械臂运动空间的上下极限。
13、所述步骤2具体为:引入一个非负向量,将带约束的运动学方程转化为联合非线性方程组,并采用指数衰减公式,推导三轮全向移动机械臂速度层运动规划方案的通用形式。
14、所述三轮全向移动机械臂速度层运动规划方案的通用形式表示为:
15、
16、其中,表示移动机械臂的联合速度且定义为表示移动平台驱动轮的旋转角速度,表示机械臂的关节速度;表示状态向量v∈r6+2n的时间导数,表示rd的时间导数;c∈r(6+2n)×(3+n)表示增广系数矩阵且定义为c=[-i3+n;i3+n],i3+n∈r(3+n)×(3+n)表示单位矩阵;d∈r(6+2n)×(6+2n)表示对角矩阵且定义为d=diag{v1,v2,…,v(6+2n)};d∈r6+2n表示增广系数向量且定义为w∈r(m+6+2n)×(9+3n)表示增广系数矩阵且定义为w=[jm 0;cm 2d],j∈rm×(3+n)表示移动机械臂的雅克比矩阵,m∈r(3+n)×(3+n)表示增广系数矩阵且定义为m=[a 0;0in],in∈rn×n表示单位矩阵;a∈r3×3为移动平台结构参数系数矩阵且表示如下:
17、
18、r∈r表示移动平台全向驱动轮的半径,l∈r表示移动平台中心点到全向驱动轮的距离;w∈r(9+3n)×(m+6+2n)表示w的伪逆矩阵,im∈r(9+3n)×(9+3n)表示单位矩阵,z∈r9+3n表示根据预设的优化指标而推导得到的用以实现不同规划目的的速度层判据。
19、根据三轮全向移动机械臂当前状态与初始状态之间的误差范数最小化的思想,采用负梯度下降公式,构建可实现重复运动的速度层判据。
20、所述速度层判据为:
21、
22、其中,pxy0∈r2和φ0∈r分别表示移动平台在xy平面上的初始位置和初始朝向角,θ0∈rn表示机械臂关节角度的初始值;ρ>0∈r表示预设的设计参数,1v∈r6+2n表示所有元素均为1的向量,联合向量表示三轮全向移动机械臂的初始状态。
23、所述步骤4具体为:
24、结合移动平台的运动学方程和速度层判据,令z=ηhvrmp,构建基于伪逆描述的三轮全向移动机械臂重复运动规划方案:
25、
26、其中,η>0∈r表示重复运动系数,h=[a-,0;0,in]∈r(9+3n)×(9+3n)表示增广系数矩阵,in∈r(6+3n)×(6+3n)表示单位矩阵,a-∈r3×3表示移动平台结构参数系数矩阵a的逆矩阵。
27、所述步骤5具体为:下位机控制器根据重复运动规划方案的计算结果驱动移动平台的三个全向轮和机械臂的关节,完成给定的末端操作任务,并实现运动空间受限情况下重复运动规划,即,运动空间受限的三轮全向移动机械臂在完成任务后回到初始状态。
28、一种运动空间受限的三轮全向移动机械臂重复运动规划系统,包括:
29、重复运动规划模块,用于执行以下步骤:考虑移动平台的位姿极限和机械臂的关节角度极限,建立三轮全向移动机械臂在运动空间受限情况下的运动学方程;将运动学方程转化为联合非线性方程组,确定三轮全向移动机械臂速度层运动规划方案的通用形式;构建可实现重复运动的速度层判据;基于速度层运动规划方案的通用形式和速度层判据,构建基于伪逆描述的重复运动规划方案;
30、驱动模块,用于执行以下步骤:下位机控制器根据重复运动规划方案的计算结果驱动移动平台的三个全向轮和机械臂的关节来完成给定的末端操作任务。
31、与现有技术相比,本发明具有以下有益效果:
32、1、本发明能有效克服现有方法的不足,考虑移动机械臂物理约束(包括移动平台的位姿极限和机械臂的关节角度极限),提供一种在速度层上设计的伪逆型重复运动规划方法,使得移动平台和机械臂在运动空间受限的情况下实现重复运动规划的目的,这对于复杂环境下移动机械臂的运动规划的有着重要的意义和价值。
33、2、本发明采用伪逆方法,在移动机械臂结构固定的情况下,建模后能够根据末端执行器的位置和朝向直接计算关节的角度或位置,不用在多解中大量计算其最优值,容易实现、计算量少。
技术特征:1.一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述步骤1具体为:对于运动空间受限的三轮全向移动机械臂,根据denavit-hartenberg参数法进行运动学建模,同时考虑移动平台的位姿极限和机械臂的关节角度极限,建立运动学方程。
3.根据权利要求2所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述运动学方程为:
4.根据权利要求3所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述步骤2具体为:引入一个非负向量,将带约束的运动学方程转化为联合非线性方程组,并采用指数衰减公式,推导三轮全向移动机械臂速度层运动规划方案的通用形式。
5.根据权利要求4所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述三轮全向移动机械臂速度层运动规划方案的通用形式表示为:
6.根据权利要求5所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,根据三轮全向移动机械臂当前状态与初始状态之间的误差范数最小化的思想,采用负梯度下降公式,构建可实现重复运动的速度层判据。
7.根据权利要求6所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述速度层判据为:
8.根据权利要求7所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述步骤4具体为:
9.根据权利要求1所述的一种运动空间受限的三轮全向移动机械臂重复运动规划方法,其特征在于,所述步骤5具体为:下位机控制器根据重复运动规划方案的计算结果驱动移动平台的三个全向轮和机械臂的关节,完成给定的末端操作任务,并实现运动空间受限情况下重复运动规划,即,运动空间受限的三轮全向移动机械臂在完成任务后回到初始状态。
10.一种运动空间受限的三轮全向移动机械臂重复运动规划系统,其特征在于,包括:
技术总结本发明涉及一种运动空间受限的三轮全向移动机械臂重复运动规划方法及系统,其中方法包括以下步骤:考虑移动平台的位姿极限和机械臂的关节角度极限,建立三轮全向移动机械臂在运动空间受限情况下的运动学方程;将运动学方程转化为联合非线性方程组,确定三轮全向移动机械臂速度层运动规划方案的通用形式;构建可实现重复运动的速度层判据;基于速度层运动规划方案的通用形式和速度层判据,构建基于伪逆描述的重复运动规划方案;下位机控制器根据重复运动规划方案的计算结果驱动移动平台的三个全向轮和机械臂的关节完成给定的末端操作任务。与现有技术相比,本发明能够使得运动空间受限的移动平台和机械臂在完成任务后同时回到各自的初始状态。技术研发人员:郭东生,丁秦,张卫东,仓乃梦,张曦元,李渠,余怡霖,陈树康,陈红,潘阳,刘小平,高鹏,郭威,褚德英受保护的技术使用者:海南大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50670.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表