机械手运动轨迹规划方法、装置、设备及存储介质与流程
- 国知局
- 2024-07-05 17:55:08
本申请涉及机械控制,尤其涉及一种机械手运动轨迹规划方法、装置、设备及存储介质。
背景技术:
1、在石油油井钻探作业中,传统的起钻或下钻过程中,需要石油工人在钻台面以及二层台进行辅助作业,以在狭小的空间中尽可能的实现立根的堆放和取用,往往需要多名操作工人同时协调工作。
2、目前,少人化和自动化作业已经成为的当前钻井修井作业的主要发展趋势,尽管部分井队已经开始装备自动化的设备,比如二层台机械手、钻台机械等,但是当前石油钻井二层台机械手在生产作业过程中存在着运动轨迹简单,运动卡顿不连续,导致机械手的工作效率低下。
技术实现思路
1、本申请的主要目的在于提供一种机械手运动轨迹规划方法、装置、设备及存储介质,旨在解决现有技术中在生产作业过程中存在着运动轨迹简单,运动卡顿不连续,导致机械手的工作效率低下的技术问题。
2、为实现上述目的,本申请提供一种机械手运动轨迹规划方法,所述机械手运动轨迹规划方法,包括:
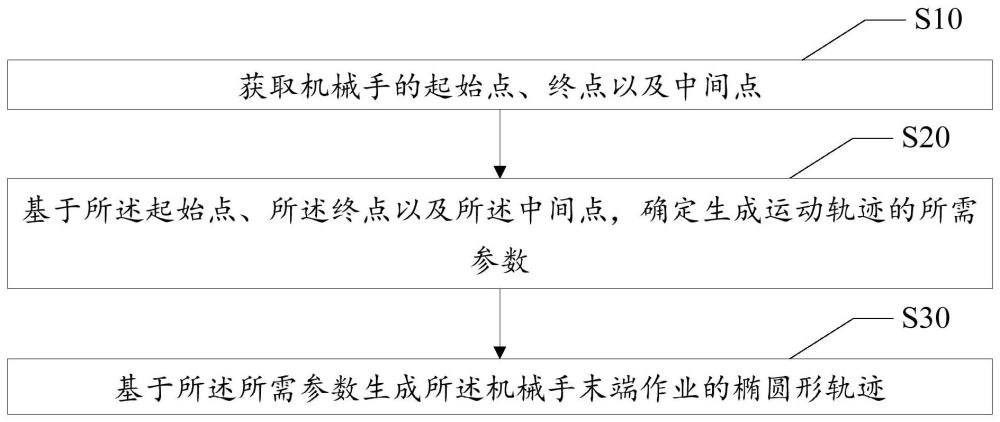
3、获取机械手的起始点、终点以及中间点;
4、基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数;
5、基于所述所需参数生成所述机械手末端作业的椭圆形轨迹。
6、可选地,所述基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数的步骤,包括:
7、规划所述起始点与所述中间点之间的直线参数;
8、将所述中间点与所述终点作为需要生成运动轨迹的椭圆顶点;
9、基于所述椭圆顶点确定所述运动轨迹的椭圆中心;
10、将所述直线参数、所述椭圆顶点与所述椭圆中心定义为所述所需参数。
11、可选地,所述基于所述所需参数生成所述机械手末端作业的椭圆形轨迹的步骤,还包括:
12、基于所述椭圆顶点与所述椭圆中心确定所述机械手从所述中间点到所述终点的弧形轨迹;
13、基于所述直线参数规划所述起始点到所述中间点之间的直线轨迹;
14、将所述直线轨迹与所述弧形轨迹平滑连接,生成所述机械手末端作业的椭圆形轨迹。
15、可选地,所述将所述直线轨迹与所述弧形轨迹平滑连接,生成所述机械手末端作业的椭圆形轨迹的步骤,包括:
16、将所述直线轨迹与所述弧形轨迹平滑连接,生成轨迹曲线;
17、基于所述机械手的逆运动学,解算机械手的关节运动变量曲线,获得机械手末端的椭圆运动轨迹。
18、可选地,所述基于所述椭圆顶点与所述椭圆中心确定所述机械手从所述中间点到所述终点的弧形轨迹的步骤,包括:
19、基于所述椭圆顶点与所述椭圆中心确定机械手从所述中间点到所述终点的椭圆形几何体;
20、基于所述中间点与所述终点所在的共同平面,从所述椭圆形几何体中确定轨迹所在平面;
21、确定所述轨迹所在平面中所述椭圆形几何体的边缘为所述弧形轨迹。
22、可选地,所述获取机械手的起始点、终点以及中间点的步骤之前,还包括:
23、获取所述机械手的机械参数;
24、基于所述机械参数与预设矢量积建立所述机械手的动力学模型;
25、基于所述动力学模型规划所述机械手末端执行连续平移和旋转任务的椭圆形轨迹。
26、可选地,所述获取机械手的中间点的步骤,包括:
27、确定所述机械手所在指梁的出口位置;
28、将所述出口位置设定为所述机械手的中间点。
29、此外,为实现上述目的,本申请还提供一种机械手运动轨迹规划装置,机械手运动轨迹规划装置包括:
30、点位获取模块,用于获取机械手的起始点、终点以及中间点;
31、参数确定模块,用于基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数;
32、轨迹生成模块,用于基于所述所需参数生成所述机械手末端作业的椭圆形轨迹。
33、此外,为实现上述目的,本申请还提出一种机械手运动轨迹规划设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机械手运动轨迹规划程序,所述机械手运动轨迹规划程序配置为实现如上文所述的机械手运动轨迹规划方法的步骤。
34、此外,为实现上述目的,本申请还提出一种存储介质,所述存储介质上存储有机械手运动轨迹规划程序,所述机械手运动轨迹规划程序被处理器执行时实现如上文所述的机械手运动轨迹规划方法的步骤。
35、本申请提供一种机械手运动轨迹规划方法、装置、设备及存储介质,与现有技术中在生产作业过程中存在着运动轨迹简单,运动卡顿不连续,导致机械手的工作效率低下相比,在本申请中,获取机械手的起始点、终点以及中间点;基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数;基于所述所需参数生成所述机械手末端作业的椭圆形轨迹。即在本申请中,通过椭圆曲线的生成方法,将起始点、终点以及中间点为位置输入变量,确定椭圆的长轴、短轴、中心等所需参数,在合成椭圆形轨迹,以减少轨迹的衔接点,使机械手末端的运动平滑,减少因为机械手末端在衔接点的状态检测与运动切换时间,因此提高机械手的工作效率。
技术特征:1.一种机械手运动轨迹规划方法,其特征在于,所述机械手运动轨迹规划方法,包括:
2.如权利要求1所述的机械手运动轨迹规划方法,其特征在于,所述基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数的步骤,包括:
3.如权利要求1所述的机械手运动轨迹规划方法,其特征在于,所述基于所述所需参数生成所述机械手末端作业的椭圆形轨迹的步骤,还包括:
4.如权利要求3所述的机械手运动轨迹规划方法,其特征在于,所述将所述直线轨迹与所述弧形轨迹平滑连接,生成所述机械手末端作业的椭圆形轨迹的步骤,包括:
5.如权利要求3所述的机械手运动轨迹规划方法,其特征在于,所述基于所述椭圆顶点与所述椭圆中心确定所述机械手从所述中间点到所述终点的弧形轨迹的步骤,包括:
6.如权利要求1所述的机械手运动轨迹规划方法,其特征在于,所述获取机械手的起始点、终点以及中间点的步骤之前,还包括:
7.如权利要求1所述的机械手运动轨迹规划方法,其特征在于,所述获取机械手的中间点的步骤,包括:
8.一种机械手运动轨迹规划装置,其特征在于,所述机械手运动轨迹规划装置包括:
9.一种机械手运动轨迹规划设备,其特征在于,所述机械手运动轨迹规划设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机械手运动轨迹规划程序,所述机械手运动轨迹规划程序配置为实现如权利要求1至7中任一项所述的机械手运动轨迹规划方法的步骤。
10.一种存储介质,其特征在于,存储介质上存储有实现机械手运动轨迹规划方法的程序,实现机械手运动轨迹规划方法的程序被处理器执行以实现如权利要求1至7中任一项所述机械手运动轨迹规划方法的步骤。
技术总结本申请公开了一种机械手运动轨迹规划方法、装置、设备及存储介质,涉及机械控制技术领域,该方法包括:获取机械手的起始点、终点以及中间点;基于所述起始点、所述终点以及所述中间点,确定生成运动轨迹的所需参数;基于所述所需参数生成所述机械手末端作业的椭圆形轨迹。在本申请中,通过椭圆曲线的生成方法,将起始点、终点以及中间点为位置输入变量,确定椭圆的长轴、短轴、中心等所需参数,在合成椭圆形轨迹,以减少轨迹的衔接点,使机械手末端的运动平滑,减少因为机械手末端在衔接点的状态检测与运动切换时间,因此提高机械手的工作效率。技术研发人员:吴辉,刘彪,廖洋受保护的技术使用者:三一能源装备有限公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49665.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。