自动抓取提钮砝码的控制方法、机械臂与机器人与流程
- 国知局
- 2024-07-05 17:55:06
本发明属于砝码运送,具体涉及一种自动抓取提钮砝码的控制方法、机器臂与机器人。
背景技术:
1、提钮砝码是一种广泛使用的砝码,提钮砝码包括砝码主体,提钮连接在砝码主体顶部,提钮包括钮身与钮帽,钮身与砝码主体连接,钮身顶部连接钮帽,钮身的直径小于钮帽的直径使得钮身相对于钮帽和砝码主体形成凹陷区域。目前,在不同工作环境现场,针对于提钮砝码的搬运,由于钮身呈凹陷状态,不便于识别,通常以砝码主体或钮帽作为抓握区域,并且大都采用人工或半操作机器方式实现搬运,智能化水平较低,人力成本较高。另外,在搬运过程中,容易产生摩擦、碰撞等现象,致使对于高精度使用要求的砝码可能引起不可挽回的损失。
技术实现思路
1、本发明提供一种自动抓取提钮砝码的控制方法,提高抓取提钮砝码的智能化水平。
2、本发明是通过以下技术方案实现的:一种自动抓取提钮砝码的控制方法,包括如下步骤:以提钮的钮身作为抓取区域,先识别提钮的钮帽与砝码主体,再根据钮帽、钮身与砝码主体之间的几何尺寸关系识别所述抓取区域,并控制机器臂上的触手抓住所述抓取区域。
3、进一步的,控制机器臂上的激光扫描仪从上至下对提钮砝码进行激光扫描来识别钮帽与砝码主体。
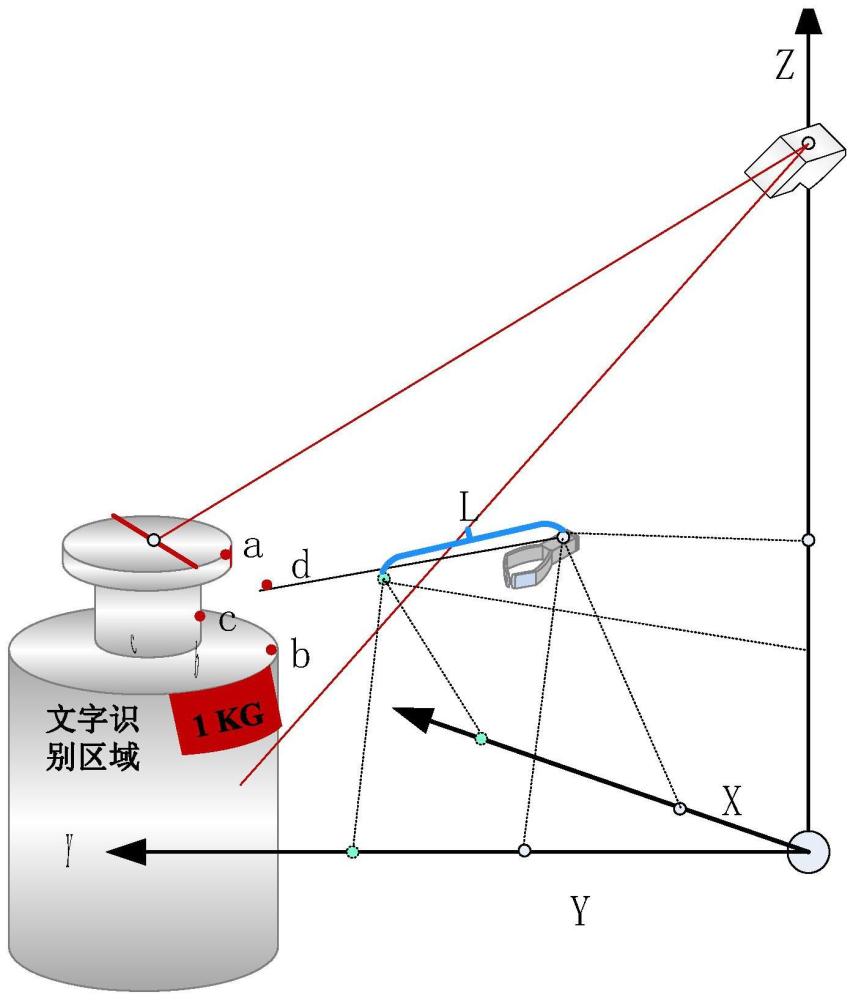
4、进一步的,以机械臂下端为原点建立三轴垂直坐标系,并且y轴方向为机械臂的伸缩方向;激光扫描的方式为:控制激光扫描仪从高于提钮砝码的水平线向下旋转进行扫描,依次获取钮帽上的特征点a与砝码主体上的特征点b的坐标,所述特征点a即为从z轴方向具有最大值的激光点中识别到的y轴方向具有最小值的激光点;所述特征点b即为从y轴方向具有最小值的激光点中识别到的z轴方向具有最大值的激光点。
5、进一步的,根据特征点a与特征点b的坐标计算钮身上特征点c的坐标,按如下公式:
6、
7、式中,xa表示特征点a在x轴上的坐标值;za表示特征点a在z轴上的坐标值;zb表示特征点b在z轴上的坐标值;r表示钮帽的半径;k1表示y轴方向上从特征点a到特征点c的距离系数,k1>1;k2表示从特征点b到特征点c的距离系数,k2>1。
8、进一步的,k1=2,k2=2。
9、进一步的,通过如下方式自动获取钮帽的半径r与距离系数k1:
10、根据扫描砝码获得的由激光点构成的点云数据生成激光图像,再通过图像识别算法解析激光图像中的文字信息以获取砝码型号或砝码重量,根据砝码型号或砝码重量查询砝码型号-砝码尺寸映射表,或砝码重量-砝码尺寸映射表得到钮帽的半径r与距离系数k1。
11、进一步的,根据扫描砝码获得的由激光点构成的点云数据生成激光图像,再通过图像识别算法解析激光图像中的文字信息以获取砝码重量,当判断出机器臂上的触手不能够承受砝码重量时,提示更换触手。
12、进一步的,所述触手为沿x轴方向开合的两指平行触手,控制张开状态的两指平行触手的根部移动到在y轴方向距离特征点c保留安全距离l的位置,此时触手根部的坐标值为(xc,yc-l,zc)。
13、本发明还提供一种机械臂,包括控制器,所述控制器配置有用于执行本发明所述的自动抓取提钮砝码的控制方法的砝码抓取程序。
14、本发明还提供一种机器人包括运载底盘,所述运载底盘上设有本发明所述的机械臂。
15、与现有技术相比,本发明的有益效果包括:
16、1、本发明针对提钮砝码的外型特征,先识别提钮砝码上的容易识别的凸出部分:钮帽与砝码主体;再根据钮帽、钮身与砝码主体之间的几何尺寸关系识别出不容易识别的凹陷部分:钮身。本发明以钮身作为抓取区域,钮身相对于砝码主体和钮帽的尺寸较小,要求的触手尺寸较小,机械臂能够灵活轻便准确的带动触手对砝码进行抓取,并且由于钮帽的尺寸大于钮身,钮帽能够限制提钮砝码从触手上掉落,提高砝码运输过程的安全性。
17、2、本发明采用激光扫描的方式识别钮帽与砝码主体,具有识别范围广、识别效率高的优点。
18、3、本发明通过激光扫描识别钮帽上的特征点a与砝码主体上的特征点b来识别钮帽与砝码主体,能够获取到特征点a与特征点b的空间坐标,根据特征点a与特征点b的空间坐标及钮帽、钮身与砝码主体之间的几何尺寸关系来计算钮身上特征点c的坐标,算法简便高效,提高钮身识别效率,从而提高运送效率。
19、4、本发明通过激光扫描获取的激光图像自动识别提钮砝码的关键参数,可适用于不同规格的砝码,具有自适应性,进一步提高智能化水平。同时,不需要额外的视觉识别模块,节省了硬件成本。
20、5、本发明采用两指平行触手作为触手,便于夹持住钮身,同时设置了安全距离l,避免触手撞击到钮身。
技术特征:1.一种自动抓取提钮砝码的控制方法,其特征在于,包括如下步骤:以提钮的钮身作为抓取区域,先识别提钮的钮帽与砝码主体,再根据钮帽、钮身与砝码主体之间的几何尺寸关系识别所述抓取区域,并控制机器臂上的触手抓住所述抓取区域。
2.根据权利要求1所述的自动抓取提钮砝码的控制方法,其特征在于,控制机器臂上的激光扫描仪从上至下对提钮砝码进行激光扫描来识别钮帽与砝码主体。
3.根据权利要求2所述的自动抓取提钮砝码的控制方法,其特征在于,以机械臂下端为原点建立三轴垂直坐标系,并且y轴方向为机械臂的伸缩方向;激光扫描的方式为:控制激光扫描仪从高于提钮砝码的水平线向下旋转进行扫描,依次获取钮帽上的特征点a与砝码主体上的特征点b的坐标,所述特征点a即为从z轴方向具有最大值的激光点中识别到的y轴方向具有最小值的激光点;所述特征点b即为从y轴方向具有最小值的激光点中识别到的z轴方向具有最大值的激光点。
4.根据权利要求3所述的自动抓取提钮砝码的控制方法,其特征在于,根据特征点a与特征点b的坐标计算钮身上特征点c的坐标,按如下公式:
5.根据权利要求4所述的自动抓取提钮砝码的控制方法,其特征在于,k1=2,k2=2。
6.根据权利要求4所述的自动抓取提钮砝码的控制方法,其特征在于,通过如下方式自动获取钮帽的半径r与距离系数k1:
7.根据权利要求4所述的自动抓取提钮砝码的控制方法,其特征在于,根据扫描砝码获得的由激光点构成的点云数据生成激光图像,再通过图像识别算法解析激光图像中的文字信息以获取砝码重量,当判断出机器臂上的触手不能够承受砝码重量时,提示更换触手。
8.根据权利要求1所述的自动抓取提钮砝码的控制方法,其特征在于,所述触手为沿x轴方向开合的两指平行触手,控制张开状态的两指平行触手的根部移动到在y轴方向距离特征点c保留安全距离l的位置,此时触手根部的坐标值为(xc,yc-l,zc)。
9.一种机械臂,其特征在于:包括控制器,所述控制器配置有用于执行如权利要求1~8任一所述的自动抓取提钮砝码的控制方法的砝码抓取程序。
10.一种机器人,其特征在于:包括运载底盘,所述运载底盘上设有如权利要求9所述的机械臂。
技术总结本发明属于砝码运送技术领域,具体涉及一种自动抓取提钮砝码的控制方法、机器臂与机器人,本发明以提钮的钮身作为抓取区域,在机器人坐标下获取砝码三维轮廓,基于砝码表面轮廓三维几何尺寸特征自上至下查找砝码特征标记点,识别提钮的钮帽与砝码主体,定位到砝码提钮钮身的空间姿态和位置,再通过识别砝码主体重量标记图形,判断砝码自身重量等级,最后通过控制机器臂上的触手抓住所述抓取区域。本发明提高了抓取提钮砝码的智能化水平、安全性与运送效率。技术研发人员:吴卫馨,董光先,周森,张雯受保护的技术使用者:重庆市计量质量检测研究院技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49661.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。