移动式电子锁的制作方法
- 国知局
- 2024-07-05 17:55:04
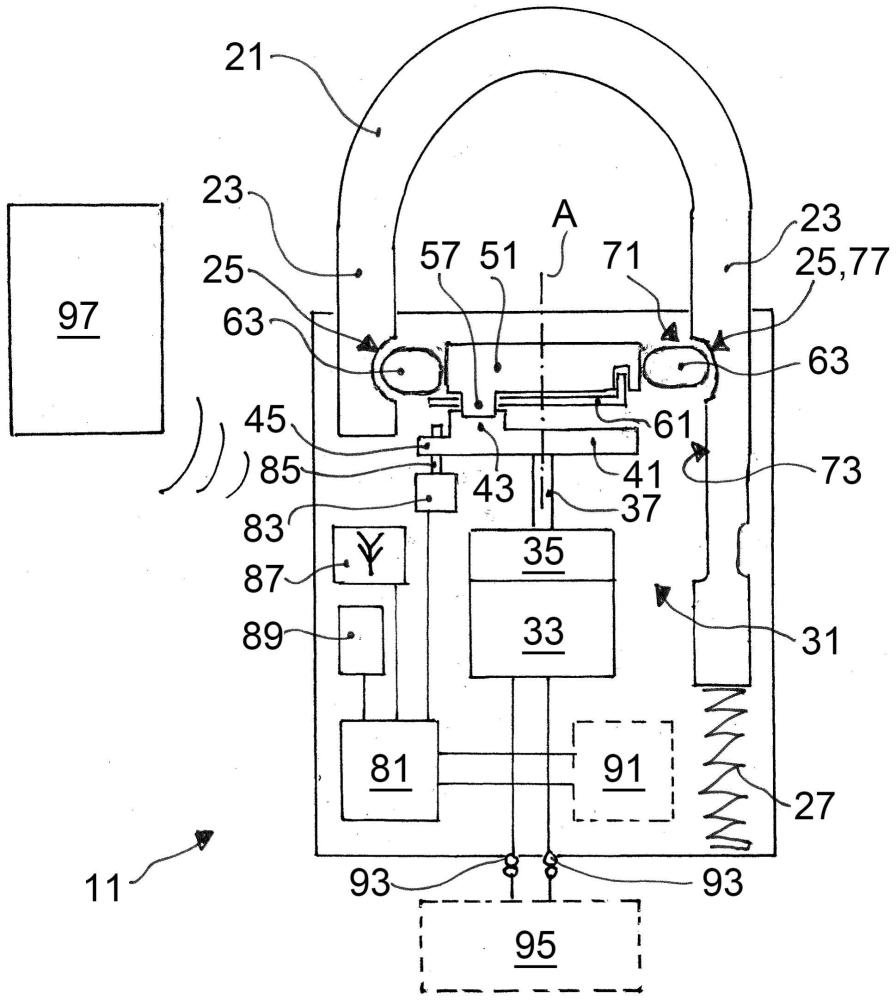
本发明涉及一种移动式电子锁,该移动式电子锁包括锁体和相对于锁体能够在关闭位置和打开位置之间移动的紧固部件,其中,锁体包括机电锁定装置以将位于关闭位置的紧固部件锁定至锁体。
背景技术:
1、在移动应用中,这种锁可用于将物体(例如两轮车)固定到静止物体或固定物体。这种锁还可以用于选择性地附接到静止物体(例如,附接到建筑物门或建筑物门的搭扣),以确保安全进出。
2、移动式电子锁可以通过例如生物特征认证(例如通过指纹传感器)、通过无线电从移动终端装置(例如智能手机)传输电子代码,或通过向锁体的数字输入装置输入代码来控制,尤其是当要解锁紧固部件时,同时向锁发送解锁命令和认证信息。在一些应用中,如果不需要机械钥匙来解锁紧固部件是有利的。例如,在一些应用中,可能还希望仅临时和/或远程地授予用户解锁授权。通过无线电认证可以进一步简化对用户或用户组的大量锁的解锁授权的管理。
3、例如,从de 10 2018 111 305 a1中已获知一种移动式电子锁,其包括大致呈l形箍(hoop)形式的紧固部件。例如,从de 10 2019 113 184a1中已获知一种移动式电子锁,其包括大致呈u形箍形式的紧固部件。
4、包括机电锁定装置的移动式电子锁的问题在于,这种锁经常在户外使用,并且因此暴露于高机械负载以及湿气和污物的进入。安装在锁中的传感器系统可能因此受到影响。对于一些电子锁,还存在用户可能操作失误的问题,这可能导致用户没有注意到锁没有被正确锁定。在移动式电子锁的一些应用中,还存在难以维持电能供应的问题,从而可能危及锁的紧固功能(securing function)。
技术实现思路
1、本发明的目的是提供一种电子锁,其具有坚固的(robust)设计,适用于移动应用并且具有简单的控制,并且即使在能量供应耗尽时仍可执行紧固功能。
2、此目的是通过具有权利要求1的特征的移动式电子锁来实现。
3、锁具有锁体和紧固部件(例如箍或螺栓;刚性的、柔性的或铰接的)。紧固部件可以相对于锁体在关闭位置和打开位置之间移动。在打开位置,紧固部件尤其地可从锁体部分地释放,使得紧固部件和锁体形成开放环,然而,紧固部件继续固定到锁体;从而,紧固部件可以例如挂在物体上或放置在物体周围。在紧固部件的关闭位置,紧固部件和锁体可以尤其地形成闭合环,且锁可以例如用于将物体固定到固定物体。锁体包括机电锁定装置以选择性地将处于关闭位置的紧固部件锁定到锁体。机电锁定装置具有电动机、夹带器(entrainer)、旋转锁闩、复位弹簧、阻挡机构和用于控制电动机的控制电路。
4、夹带器可通过电动机驱动以在起始位置和释放位置之间进行旋转移动。为此,夹带器例如可直接或通过减速齿轮单元与电动机的转子联接。为了电动机可以通过夹带器驱动旋转锁闩,旋转锁闩是驱动有效地联接夹带器,但是通过至少对应于夹带器在起始位置和释放位置之间的移动期间的旋转角度的旋转间隙。因此,夹带器也可以在起始位置和释放位置之间移动而不驱动旋转锁闩,即当夹带器利用旋转间隙时,从与旋转锁闩的接触开始。旋转锁闩在锁定位置的方向上通过复位弹簧(例如扭力弹簧)预加载,旋转锁闩在锁定位置将位于关闭位置的紧固部件锁定到锁体(直接或间接地,例如,经由插入阻挡元件)。
5、从旋转锁闩的锁定位置开始并从夹带器的起始位置出发,旋转锁闩可通过夹带器抵抗复位弹簧的力电动驱动至解锁位置,其中复位弹簧被张紧。在这个解锁位置,紧固部件进行解锁,以移动到打开位置。紧固部件可以手动移动到打开位置,或者可通过释放弹簧在打开位置的方向上预张紧,并且由于解锁可以因此自动跳入打开位置。只要紧固部件处于打开位置,阻挡机构首先根据其预加载阻挡旋转锁闩在解锁位置以防止复位移动。
6、这种解锁由控制电路响应于解锁命令启动,其中,控制电路通过适当地控制电动机将夹带器从起始位置旋转到释放位置。解锁命令可以连同认证信息一起传输到控制电路,或者作为认证信息的组成部分,例如以可以从用户的移动终端装置(例如智能手机)传输的无线电信号的形式(优选地作为加密信号),尤其是根据通用协议(例如蓝牙、nfc)。
7、控制电路可以例如包括集成电路(ic);微处理器;中央处理器(cpu);或特殊应用集成电路(asic),尤其是具有整合的非易失性存储器。控制电路还可以包括用于电动机和认证传感器系统的必要的驱动器电子设备,这仍将在下面提及。
8、控制电路配置为,在将旋转锁闩电驱动到解锁位置之后,通过适当地控制电动机,利用旋转间隙将夹带器旋转回到其起始位置,同时旋转锁闩通过阻挡机构被阻挡在解锁位置,即保持在解锁位置。此后,尤其是独立于控制电路,阻挡机构可以被释放,因为用户将紧固部件从打开位置移动到关闭位置(例如,通过将紧固部件插入锁体)。由于阻挡机构的释放,触发旋转锁闩的解锁,并因此触发使复位弹簧松弛,使得旋转锁闩通过复位弹簧机械地驱动以进行复位移动至锁定位置。
9、因此,机电锁定装置配置为当接收到电子解锁命令后,通过电驱动旋转锁闩来解锁紧固部件。反之,随后通过用户手动移动紧固部件,纯机械地发生及触发将紧固部件锁定到锁体。
10、这种移动式电子锁的实施方式实现不需要或仅需要用于机电锁定装置的可移动元件的简单位置传感器系统的控制序列。一旦出现解锁命令,就可以根据预定的时间顺序通过电动机和夹带器驱动旋转锁闩。实际上可提供用于夹带器的位置传感器,例如,以防止电动机必须行进到机械端部支座(abutment)(不希望的磨损)。然而,例如,紧固部件不需要位置传感器,尤其是识别紧固部件是否已经移动到关闭位置中。因为可以纯机械地触发和执行紧固部件的锁定,而不需要控制电路的监控。因此,针对必须安装在暴露位置的位置传感器的故障,该锁特别耐用(例如,在用于紧固部件的锁体的引入通道中,来自环境的的湿气或污物可能容易移动到该引入通道中)。
11、由于锁定的机械触发和执行,当用户将紧固部件从打开位置移动到关闭位置时,用户通过已经发生的紧固部件的锁定直接接收触觉反馈。由此可以避免操作错误,特别是忽略未发生或未完全发生的锁定。
12、此外,即使电动机没有电能可用,锁仍然可以实现其紧固功能,因为紧固部件从打开位置移动到关闭位置,并且然后通过机械驱动自动锁定。因为在锁定位置的方向上,旋转锁闩的驱动是通过复位弹簧实现的,即通过机械能量储存实现的。因此,例如,锁可以长期存放在固定仓库(stationary warehouse)或运输车辆中,并且仍然可以直接用于固定物体(通过锁定),即使锁的电能储存耗尽(例如放电)。
13、下面解释进一步的实施方式。
14、在一些实施方式中,可以提供机械端部支座(例如,在锁体的壳体的部段(section)处)以用于夹带器在至少一个旋转方向上的旋转移动,其中控制电路可配置为经由电动机驱动夹带器进行旋转直至相应的端部支座。夹带器可以抵靠相应的端部支座以限制旋转移动。在一些实施方式中,控制电路可配置为监测电动机的马达电流,其中,一旦确定马达电流增加(这表明夹带器已经到达相应的端部支座)就结束驱动。
15、对此可替代地,在一些实施方式中,锁可以具有位置传感器,该位置传感器配置为检测夹带器的至少一个旋转位置。这样的位置传感器可以直接与可旋转移动的夹带器协作或者可以在另一个位置起作用(例如,在电动机内的转子处或在电动机外的马达轴处)。在这两种情况下,位置传感器都可以布置在锁体内,尤其是在锁体的壳体内,并且因此可以很好地防止湿气和污物。这样的位置传感器无须必要输出位置数值(例如旋转角度),但是如果至少检测到到达期望位置即通常足够。
16、如果对于夹带器的两个旋转方向存在至少一个位置传感器和/或产生位置信号,则控制电路可配置为响应于解锁命令,以在释放位置的方向上旋转夹带器,直到位置传感器发出到达释放位置的信号。控制电路可以可选地配置为随后等待预定的等待间隔。控制电路可配置为此后使夹带器在起始位置的方向上旋转返回,直到位置传感器发出到达起始位置的信号。由此可以遵循预定的控制顺序,由此可以避免电动机总是必须抵靠端部支座运行。
17、在一些实施方式中,位置传感器可配置为开关。因此,位置传感器可以具有特别简单和坚固的设计。
18、在一些实施方式中,电动机的夹带器可以旋转地固定连接到至少一个凸轮。一个或多个凸轮例如可以沿径向方向或沿轴向方向(相对于夹带器的旋转轴线)突出。一个或多个凸轮例如可以形成在旋转盘上,该旋转盘旋转固定地连接到夹带器。机电锁定装置可以具有至少一个可以由一个或多个凸轮致动的开关(尤其是已经提到的开关),其中,控制电路可配置为根据检测到的(多个)开关的致动来控制电动机。一个或多个凸轮可以不费力且空间需求小地形成在可旋转移动的夹带器处,由此有可能使得根据夹带器的旋转位置简单且可靠地致动相应开关。
19、在一些实施方式中,夹带器可以旋转固定地连接到两个凸轮,这两个凸轮在旋转方向上彼此间隔开,其中,锁具有单个开关,该单个开关在夹带器的起始位置通过两个凸轮之一致动,并且在夹带器的释放位置通过两个凸轮中的另一个致动。因此,仅需要单个开关来向控制电路发送夹带器分别到达起始位置和释放位置的信号。
20、在一些实施方式中,一个或多个开关可配置为检测由于至少一个凸轮从第一旋转方向的移动而引起的致动和由于至少一个凸轮从与第一旋转方向相反的第二旋转方向的移动而引起的致动,并且将上述致动彼此区分开来。由于一个或多个开关是方向敏感的,控制电路可以确定在重新启动的情况下,夹带器的当前旋转位置的区域(例如,由于机械阻挡导致的功能干扰或能量供应故障),而无需接近机械端部支座。
21、在一些实施方式中,开关可以尤其地具有摇杆,根据至少一个凸轮的旋转方向(即,根据开关行进的方向),摇杆可以在第一方向或在与其相反的第二方向上进行致动。摇杆的最终杆位置可以根据信号技术来相互区分。
22、在一些实施方式中,摇杆可以预加载到中心位置中,使得凸轮可以从两个旋转方向无干扰地越过摇杆。
23、在一些实施方式中,摇杆的中心位置可以与(多个)凸轮的旋转轴线平行对齐。因此,锁的紧凑设计是可能的,因为就包括摇杆的开关来说,在(多个)凸轮的移动路径的径向外侧仅需要小的安装空间。
24、在一些实施方式中,开关可配置为也从由于凸轮在第一旋转方向或第二旋转方向上的移动而引起的相应致动来区分摇杆的中心位置。因此,摇杆的总共三个杆位置可以根据信号技术彼此区分,其中可以直接识别夹带器的中间位置(在起始位置和释放位置之间)。这可以简化重启(如果有必要,例如,由于功能障碍或电源故障)。
25、在一些实施方式中,所述开关是锁包括的唯一位置传感器,用于检测电动机的夹带器的旋转位置、旋转锁闩的旋转位置和紧固部件的位置。如上所解释的,由于机电锁定装置的特定设计,不需要另外的位置传感器,这将涉及额外的构造工作并且可能与更高的干扰倾向相关联(尤其是有关湿气或污物的进入)。
26、关于在解锁位置的旋转锁闩的阻挡机构,阻挡机构可以具有紧固部件的阻挡部段,该阻挡部段在旋转锁闩的解锁位置和在紧固部件的打开位置与旋转锁闩的阻挡部段接合,以便将旋转锁闩阻挡在解锁位置。紧固部件还可以具有解锁(unblocking)部段,当将紧固部件从打开位置移动到关闭位置时,解锁部段位于旋转锁闩处而不是紧固部件的阻挡部段处,并且解锁旋转锁闩以用于在锁定位置的方向上的复位移动。因此,通过用户将紧固部件移动到关闭位置并由此移动紧固部件的解锁部段(而不是阻挡部段)至旋转锁闩的水平,可以以简单的方式触发阻挡机构的释放并因此触发紧固部件到锁体的锁定。
27、在一些实施方式中,如上所提到的,电动机的夹带器可以通过减速齿轮单元联接到电动机的转子。由此可以产生足够高的扭矩以将旋转锁闩驱动到解锁位置并且同时张紧复位弹簧。
28、在一些实施方式中,锁可以具有用于获取认证信息的认证传感器系统,其中,控制电路配置为仅当获取的认证信息对应于解锁授权时才执行解锁命令,其中,认证传感器系统包括以下传感器系统中的至少一个:
29、-生物识别传感器;
30、-用于接收无线电信号的无线电通信装置;或
31、-代码输入装置。
32、锁因此通常可以以不同的方式接收认证信息,其使用户的解锁合法化。解锁命令尤其可以与认证信息一起或作为认证信息的组成部分被传输到控制电路。控制电路可以具有存储器或连接到存储器,存储器中储存了关于解锁授权的信息。控制电路可配置为评估接收到的认证信息并且具体地比较接收到的认证信息与储存的关于解锁授权的信息,并且仅当存在匹配时才执行解锁命令。除了从本地存储器读取之外,关于解锁授权的信息也可通过无线电从远端存储器(例如云端存储器)读出。
33、生物识别传感器例如可以包括指纹传感器。
34、无线电通信装置可配置为根据通用协议(例如蓝牙、近场通信nfc、长期演进技术lte或其进一步发展)接收无线电信号。无线电通信装置可尤其配置为从用户的移动终端装置(例如智能手机)接收包括认证信息的无线电信号。无线电信号较佳地被加密,其中,控制电路可配置为解密无线电信号并且因此提取认证信息。无线电通信装置可以具有无线电接收器。在一些实施方式中,无线电通信装置可以附加地具有无线电发射机以能够双向通信,并且例如还发送状态信息或确认信号。
35、代码输入装置可以具体地包括用于输入字符序列的数字输入装置(例如,键盘或具有虚拟键的触摸屏)。
36、在一些实施方式中,锁可以具有向电动机和控制电路供电的电能源,例如电池或充电电池。
37、作为这种内部电能源的替代或除此之外,在一些实施方式中,锁可以具有至少一个电气端子,用于接收电能以用于电动机和控制电路的能量供应。电气端子可配置为选择性地联接到来自锁体外部的电能源。因此,如必要,机电锁定装置可以从外部供应电能,尤其是用于解锁锁的紧固部件。
38、在具有用于外部电能源的电气端子的实施方式中,较佳地是电气端子被配置为仅接收用于电动机和控制电路的电能,但不接收包括认证信息的信号。取而代之的是,例如解锁命令所需的认证信息较佳地通过与电气端子的分离的锁的界面而传输到控制电路。因此,可以提供一种相对简单和廉价的外部电能源,并且用户因此也可以临时储存多个备份以确保总是具有至少一个充足电的能源。当用户使用多个相同结构的锁并且例如必须在单次行程(trip)中定位和解锁它们时,这在移动使用期间可能是重要的。反之,所需的身份认证可以始终使用相同的装置执行,尤其是通过通常用户总是在用的智能手机。
39、在一些实施方式中,如上已提及的,紧固部件可以在打开位置的方向上进行预加载。为此,例如可以设置释放弹簧,其一方面支承在锁体处,另一方面支承在紧固部件处。
40、在一些实施方式中,夹带器可以具有驱动部段,当夹带器从起始位置开始在释放位置的方向上旋转而旋转锁闩处于锁定位置时,夹带器的该驱动部段接触或位于旋转锁闩的驱动部段处。因此,夹带器可以经由夹带器的驱动部段(例如,端面、台阶、边缘、突起等)和旋转锁闩的驱动部段(例如,互补几何形状)驱动有效地联接至旋转锁闩,以驱动旋转锁闩,并且同时张紧复位弹簧。如果在旋转锁闩被阻挡机构阻挡并保持在解锁位置时,夹带器从释放位置旋转回到起始位置,则夹带器的驱动部段可能与旋转锁闩的驱动部段分离。
41、在一些实施方式中,机电锁定装置可具有至少一个阻挡元件,当紧固部件处于关闭位置并且旋转锁闩处于锁定位置时,旋转锁闩通过该阻挡元件与紧固部件协作以将紧固部件锁定至锁体。相应的阻挡元件可以例如具有球体、圆柱体、椭圆体、销、板或滑块的形状,尤其是具有圆形端部。相应的阻挡元件尤其可以在径向方向上(相对于旋转锁闩的旋转轴线)可移动地支承在锁体中。相应的阻挡元件可以与旋转锁闩的驱动表面协作,尤其是在旋转锁闩的侧表面处。
42、在一些实施方式中,锁可配置为挂锁(padlock),其中紧固部件配置为实质上为u形的箍件。u形箍件可以具有两个臂,两个臂尤其地彼此平行对准。两个臂可以是等长的或非等长的。机电锁定装置较佳地配置为将两个臂锁定在u形箍件的闭合位置。为此,旋转锁闩可配置为在锁定位置直接或经由相应的这种阻挡元件接合到相应的箍件臂的凹部中。紧固部件或u形箍件由此可以尤其稳定且可靠地锁定到锁体。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49656.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
自动切边修角机的制作方法
下一篇
返回列表