一种多功能康养机器人的制作方法
- 国知局
- 2024-07-08 10:52:03
本发明涉及机器人,具体涉及一种多功能康养机器人。
背景技术:
1、机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序。在医院工作中,为了分担医疗人员的工作以及防止患者与医护人员之间可能造成的交叉感染,利用机器人代替医疗人员工作越来越普遍。
2、现有康养机器人主要用于向不同病房运送物资,其包括但不限于食物和药品。然而由于食物和部分药品在运送过程中需要保温,现有技术中的物品存放箱一般采用多个分隔设置的箱体进行保温,导致在对物品进行保温时需要消耗较多的能量,不够环保,且在运送物料的时候多次开合舱门不仅易产生交叉感染,而且影响保温效果。
技术实现思路
1、本发明提供一种多功能康养机器人,以解决现有的机器人保温效果差,需要消耗大量能量的问题。
2、本发明的一种多功能康养机器人采用如下技术方案:一种多功能康养机器人,包括存放箱、移动组件、动力组件、顶推组件和至少一个输送组件;存放箱上端设置有取物口,存放箱内部设置有保温装置;存放箱内部限定出暂存空间和蜗状移动空间,蜗状移动空间内部设置有蜗状轨道,暂存空间能够存放至少一个输送组件,暂存空间和蜗状移动空间连通;输送组件用于承接物料,输送组件能够从暂存空间内移动至蜗状移动空间,并沿着蜗状轨道由内向外移动进行接料;输送组件能够沿着蜗状轨道由外向内移动,且在输送组件沿着蜗状轨道由外向内移动时能够触发顶推组件,使顶推组件将其中一个输送组件向取物口方向顶出进行出料,继而从蜗状移动空间移动至暂存空间内;移动组件用于驱动存放箱移动,以使存放箱能够到达指定位置,动力组件用于驱动至少一个输送组件沿着蜗状轨道移动。
3、进一步地,还包括控制系统,移动组件、动力组件、顶推组件均与控制系统电性连接,存放箱上设置有距离传感器,距离传感器与移动组件电性连接。
4、进一步地,蜗状轨道包括第一轨道和第二轨道,存放箱内部固定设置有蜗状隔板,蜗状隔板沿竖直方向设置,第一轨道和第二轨道均为螺旋结构,第一轨道设置于蜗状隔板内侧,第二轨道设置于蜗状隔板外侧,蜗状移动空间处于外圈的第一轨道与其相邻的内圈的第二轨道之间;暂存空间由蜗状隔板的内端限定而成,且暂存空间沿竖直方向设置。
5、进一步地,输送组件包括承接盘和连接件,承接盘底部开设有限位槽,限位槽滑动安装于蜗状隔板,每两个承接盘之间通过连接件首尾相连,且位于最外端的承接盘与动力组件相连,以在动力组件移动时推动与其相连的最外端的承接盘移动;将承接盘上靠近暂存空间的一端称为承接盘的内端,远离暂存空间的一端称为承接盘的外端,每个承接盘的内端底部均设置有顶推斜面,每个承接盘的外端底部均设置有顶推口,以在最内端的承接盘移动至暂存空间后,与其相邻的另一个承接盘的顶推斜面能够与该承接盘的顶推口相配合,将该承接盘向上推动,直至该承接盘被完全抬起处于另一个承接盘的上端。
6、进一步地,连接件包括两个固定口和拉绳,两个固定口分别设置在两个相邻的承接盘的下端,两个固定口之间通过拉绳相连,承接盘上开设有豁口,固定口与豁口处于同一中线。
7、进一步地,动力组件包括壳体、主动动力轮、从动动力轮和两个限位轮;壳体上端设置有滑动槽,滑动槽滑动安装于蜗状隔板,主动动力轮能够转动地安装于壳体内,从动动力轮安装于壳体下端,从动动力轮与主动动力轮以及第一轨道之间均为摩擦传动;两个限位轮均固定安装于壳体,且两个限位轮均与第二轨道摩擦接触。
8、进一步地,限位轮为橡胶材质。
9、进一步地,蜗状隔板内侧与外侧均设置有限位凸起,滑动槽以及限位槽均滑动安装于限位凸起。
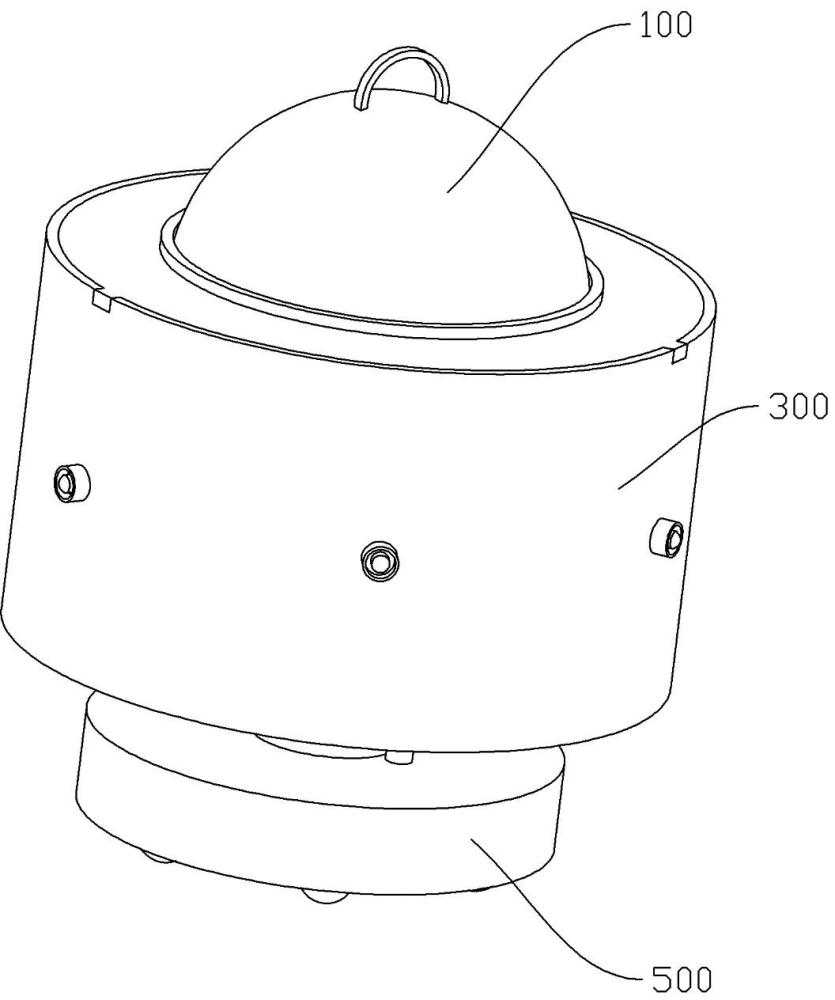
10、进一步地,存放箱包括箱体和放料箱盖,放料箱盖上端设置有把手,放料箱盖上端开设有所述取物口,放料箱盖上端放置有取物箱盖。
11、进一步地,顶推组件包括电缸和伸缩推杆,伸缩推杆沿竖直方向设置,伸缩推杆与取物口在同一竖直方向,电缸用于驱动伸缩推杆伸缩;承接盘内端设置有用于放置物料的环形卡块;承接盘上开设有让位孔,让位孔位于承接盘中部。
12、本发明的有益效果是:
13、1、本发明的一种多功能康养机器人通过在存放箱内部限定出暂存空间和蜗状移动空间,并在蜗状移动空间内部设置蜗状轨道,将至少一个输送组件在蜗状轨道内的移动分为由内而外的接料过程和由外而内的出料过程,蜗状的运输方式可以保证物料在出料过程中的集中分布,通过物料集聚的方式,实现自动的接料和出料,在物料由外到内逐渐靠近暂存空间的过程中降低了加热所需能量,大大提高了对于物料的保温效果。
14、2、通过在承接盘上开设豁口,并使固定口与豁口处于同一中线,以缩短拉绳的长度,保证两个承接盘之间的紧密连接,以缩小装置体积,提高容积率,也可进一步提高保温效果,防止热量散失。
技术特征:1.一种多功能康养机器人,其特征在于:包括存放箱、移动组件、动力组件、顶推组件和至少一个输送组件;存放箱上端设置有取物口,存放箱内部设置有保温装置;存放箱内部限定出暂存空间和蜗状移动空间,蜗状移动空间内部设置有蜗状轨道,暂存空间能够存放至少一个输送组件,暂存空间和蜗状移动空间连通;输送组件用于承接物料,输送组件能够从暂存空间内移动至蜗状移动空间,并沿着蜗状轨道由内向外移动进行接料;输送组件能够沿着蜗状轨道由外向内移动,且在输送组件沿着蜗状轨道由外向内移动时能够触发顶推组件,使顶推组件将其中一个输送组件向取物口方向顶出进行出料,继而从蜗状移动空间移动至暂存空间内;移动组件用于驱动存放箱移动,以使存放箱能够到达指定位置,动力组件用于驱动至少一个输送组件沿着蜗状轨道移动。
2.根据权利要求1所述的一种多功能康养机器人,其特征在于:还包括控制系统,移动组件、动力组件、顶推组件均与控制系统电性连接,存放箱上设置有距离传感器,距离传感器与移动组件电性连接。
3.根据权利要求1所述的一种多功能康养机器人,其特征在于:蜗状轨道包括第一轨道和第二轨道,存放箱内部固定设置有蜗状隔板,蜗状隔板沿竖直方向设置,第一轨道和第二轨道均为螺旋结构,第一轨道设置于蜗状隔板内侧,第二轨道设置于蜗状隔板外侧,蜗状移动空间处于外圈的第一轨道与其相邻的内圈的第二轨道之间;暂存空间由蜗状隔板的内端限定而成,且暂存空间沿竖直方向设置。
4.根据权利要求3所述的一种多功能康养机器人,其特征在于:输送组件包括承接盘和连接件,承接盘底部开设有限位槽,限位槽滑动安装于蜗状隔板,每两个承接盘之间通过连接件首尾相连,且位于最外端的承接盘与动力组件相连,以在动力组件移动时推动与其相连的最外端的承接盘移动;将承接盘上靠近暂存空间的一端称为承接盘的内端,远离暂存空间的一端称为承接盘的外端,每个承接盘的内端底部均设置有顶推斜面,每个承接盘的外端底部均设置有顶推口,以在最内端的承接盘移动至暂存空间后,与其相邻的另一个承接盘的顶推斜面能够与该承接盘的顶推口相配合,将该承接盘向上推动,直至该承接盘被完全抬起处于另一个承接盘的上端。
5.根据权利要求4所述的一种多功能康养机器人,其特征在于:连接件包括两个固定口和拉绳,两个固定口分别设置在两个相邻的承接盘的下端,两个固定口之间通过拉绳相连,承接盘上开设有豁口,固定口与豁口处于同一中线。
6.根据权利要求4所述的一种多功能康养机器人,其特征在于:动力组件包括壳体、主动动力轮、从动动力轮和两个限位轮;壳体上端设置有滑动槽,滑动槽滑动安装于蜗状隔板,主动动力轮能够转动地安装于壳体内,从动动力轮安装于壳体下端,从动动力轮与主动动力轮以及第一轨道之间均为摩擦传动;两个限位轮均固定安装于壳体,且两个限位轮均与第二轨道摩擦接触。
7.根据权利要求6所述的一种多功能康养机器人,其特征在于:限位轮为橡胶材质。
8.根据权利要求7所述的一种多功能康养机器人,其特征在于:蜗状隔板内侧与外侧均设置有限位凸起,滑动槽以及限位槽均滑动安装于限位凸起。
9.根据权利要求3所述的一种多功能康养机器人,其特征在于:存放箱包括箱体和放料箱盖,放料箱盖上端设置有把手,放料箱盖上端开设有所述取物口,放料箱盖上端放置有取物箱盖。
10.根据权利要求8所述的一种多功能康养机器人,其特征在于:顶推组件包括电缸和伸缩推杆,伸缩推杆沿竖直方向设置,伸缩推杆与取物口在同一竖直方向,电缸用于驱动伸缩推杆伸缩;承接盘内端设置有用于放置物料的环形卡块;承接盘上开设有让位孔,让位孔位于承接盘中部。
技术总结本发明涉及机器人技术领域,具体涉及一种多功能康养机器人。一种多功能康养机器人包括存放箱、移动组件、动力组件、顶推组件和至少一个输送组件。存放箱内部限定出暂存空间和蜗状移动空间,蜗状移动空间内部设置有蜗状轨道,暂存空间能够存放至少一个输送组件。本发明的一种多功能康养机器人通过在存放箱内部限定出暂存空间和蜗状移动空间,并在蜗状移动空间内部设置蜗状轨道,蜗状的运输方式可以保证物料在出料过程中的集中分布,通过物料集聚的方式,实现自动的接料和出料,在物料由外到内逐渐靠近暂存空间的过程中降低了加热所需能量,很大程度的提高了对于物料的保温效果。技术研发人员:曹金丹,徐晓民,周凯华受保护的技术使用者:江苏奥富能机器人科技有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50680.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表