机器人
- 国知局
- 2024-07-08 11:02:00
本公开涉及终端,尤其涉及一种机器人。
背景技术:
1、目前,在航空航天领域广泛的应用了复合材料,而随着服役年限的增加,复合材料可能出现损失和失效。
2、通常,主要是通过打磨去除损失区域,然后预浸料固化实现修复。但是,在打磨过程中,通常是对复合材料进行逐层打磨,因此对打磨精度的要求非常高,常规的打磨装置对复合材料进行打磨进给量无法给出反馈,因此打磨精度较低,不满足对复合材料的打磨要求。
技术实现思路
1、本公开提供一种机器人,以解决相关技术中的不足。
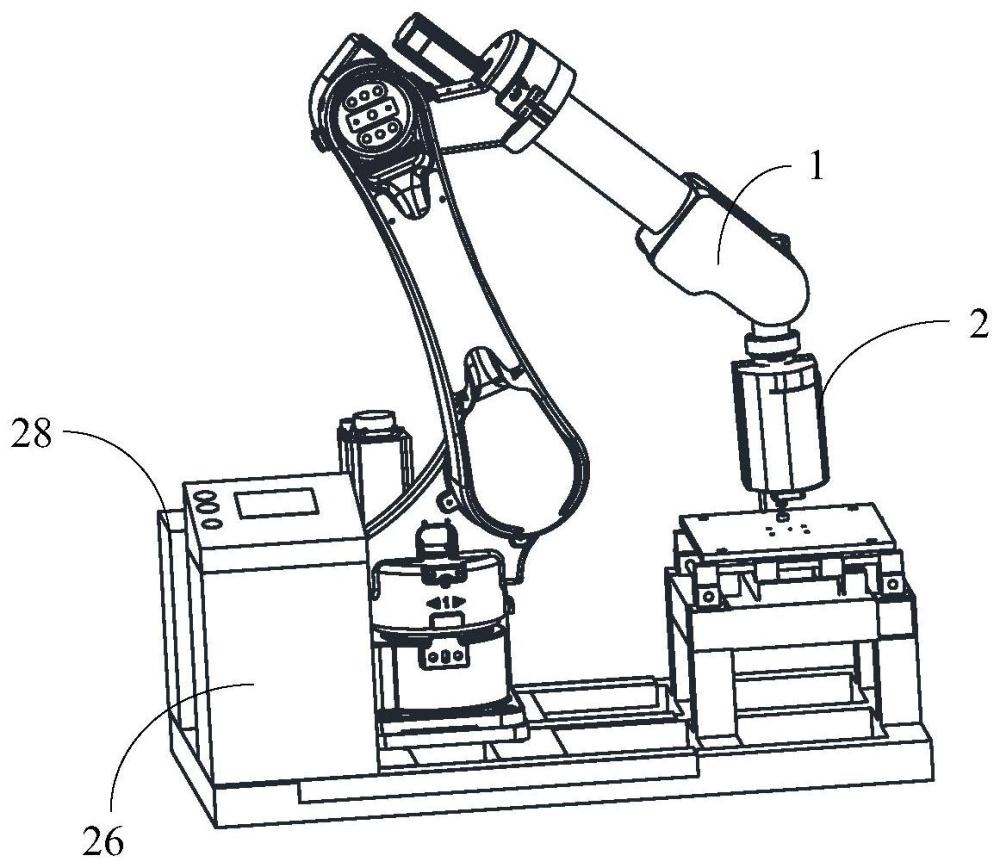
2、根据本公开实施例的第一方面,提供一种机器人,包括:
3、机器人主体;
4、末端执行机构,所述末端执行机构与所述机器人主体连接,所述机器人主体驱动所述末端执行机构绕第一轴线转动;
5、所述末端执行机构包括电机、传动部、主轴、打磨头、测距传感器和控制器,所述传动部连接所述电机和所述主轴,以驱动所述主轴沿所述第一轴线方向平移,所述打磨头与所述主轴连接,所述控制器与所述电机和所述测距传感器分别电连接;
6、所述测距传感器用于检测待打磨表面与所述末端执行机构任一表面之间的间距,所述控制器用于根据间距变化量,控制所述电机的转动量。
7、可选的,所述控制器还用于根据多个所述测距传感器对应的多个间距变化量,判定所述待打磨表面的法向与所述打磨头的轴向之间的相对位置关系,并根据所述相对位置关系调整所述机器人主体的姿态。
8、可选的,所述传动部包括丝杆和与所述丝杆螺纹连接的滑块,所述丝杆与所述电机的输出轴连接,所述滑块与所述主轴固定连接。
9、可选的,所述末端执行机构包括多个测距传感器,多个测距传感器阵列排布。
10、可选的,所述末端执行机构还包括与所述控制器电连接的二维力传感器,所述二维力传感器用于测试所述打磨头在打磨过程中受到的切向力和径向力;
11、所述控制器用于根据所述二维力传感器检测的数据,控制所述电机的工作状态。
12、可选的,所述末端执行机构还包括与所述控制器电连接的轴向力传感器,所述轴向力传感器用于测试所述打磨头在打磨过程中受到的轴向力;
13、所述控制器用于根据所述轴向力传感器检测的数据,控制所述电机的工作状态。
14、可选的,所述末端执行机构还包括与所述控制器电连接的扭矩传感器,所述扭矩传感器用于测试所述打磨头在打磨过程中受到的扭矩;
15、所述控制器用于根据所述扭矩传感器检测的数据,控制所述电机的工作状态。
16、可选的,还包括支架、气管和除尘系统,所述支架设有朝向所述待打磨表面设置的吸气口,所述吸气口通过所述气管连通所述除尘系统。
17、可选的,多个所述测距传感器环绕设置在所述吸气口的四周。
18、可选的,在所述第一轴线的平行方向上,所述打磨头的进给精度为±0.05mm。
19、本公开的实施例提供的技术方案可以包括以下有益效果:
20、由上述实施例可知,本公开通过测距传感器的作用可以对进给时打磨头的打磨深度进行实时检测,进而在打磨深度超过精度范围的情况下,调整电机的转动量,进而调整打磨头的进给量,使之满足进给精度的要求,有利于控制打磨头的进给精度和打磨深度,更加适合用于对航空航天领域应用的复合材料进行打磨。
21、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:1.一种机器人,其特征在于,包括:
2.根据权利要求1所述的机器人,其特征在于,所述控制器还用于根据多个所述测距传感器对应的多个间距变化量,判定所述待打磨表面的法向与所述打磨头的轴向之间的相对位置关系,并根据所述相对位置关系调整所述机器人主体的姿态。
3.根据权利要求1所述的机器人,其特征在于,所述传动部包括丝杆和与所述丝杆螺纹连接的滑块,所述丝杆与所述电机的输出轴连接,所述滑块与所述主轴固定连接。
4.根据权利要求1所述的机器人,其特征在于,所述末端执行机构包括多个测距传感器,多个测距传感器阵列排布。
5.根据权利要求1所述的机器人,其特征在于,所述末端执行机构还包括与所述控制器电连接的二维力传感器,所述二维力传感器用于测试所述打磨头在打磨过程中受到的切向力和径向力;
6.根据权利要求1所述的机器人,其特征在于,所述末端执行机构还包括与所述控制器电连接的轴向力传感器,所述轴向力传感器用于测试所述打磨头在打磨过程中受到的轴向力;
7.根据权利要求1所述的机器人,其特征在于,所述末端执行机构还包括与所述控制器电连接的扭矩传感器,所述扭矩传感器用于测试所述打磨头在打磨过程中受到的扭矩;
8.根据权利要求1所述的机器人,其特征在于,还包括支架、气管和除尘系统,所述支架设有朝向所述待打磨表面设置的吸气口,所述吸气口通过所述气管连通所述除尘系统。
9.根据权利要求8所述的机器人,其特征在于,多个所述测距传感器环绕设置在所述吸气口的四周。
10.根据权利要求1所述的机器人,其特征在于,在所述第一轴线的平行方向上,所述打磨头的进给精度为±0.05mm。
技术总结本公开是关于一种机器人。机器人包括:机器人主体和末端执行机构,所述末端执行机构与所述机器人主体连接,所述机器人主体驱动所述末端执行机构绕第一轴线转动;所述末端执行机构包括电机、传动部、主轴、打磨头、测距传感器和控制器,所述传动部连接所述电机和所述主轴,以驱动所述主轴沿所述第一轴线方向平移,所述打磨头与所述主轴连接,所述控制器与所述电机和所述测距传感器分别电连接;所述测距传感器用于检测待打磨表面与所述末端执行机构任一表面之间的间距,所述控制器用于根据间距变化量,控制所述电机的转动量。技术研发人员:姚学锋,张来彬,宣善勇,单奕萌,符彬受保护的技术使用者:清华大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51615.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
标签模切刀刀架的制作方法
下一篇
返回列表