避障系统及扫雪机器人的制作方法
- 国知局
- 2024-07-09 16:57:33
本技术涉及机器人,特别涉及一种避障系统及扫雪机器人。
背景技术:
1、扫雪机器人作为庭院机器人的一种,包括扫雪装置及用来拖动扫雪装置在庭院内移动的自移动设备。自移动设备通常为轮式或履带式的车身,扫雪装置主要包括卷雪机构和抛雪机构,卷雪机构把地面的积雪攒聚至卷雪舱,再通过抛雪机构将卷雪舱内的积雪抛向指定方向。
2、扫雪机器人为了实现自动清雪功能,通常需要提前设定行走路径,执行扫雪工作时按照设定的轨迹行进。但当行走轨迹上出现障碍物时,扫雪机器人会通过避障系统绕开障碍物继续行进。但现有的扫雪机器人避障系统单一,稳定性差,一旦出现故障就会导致整个设备无法运行。
技术实现思路
1、本实用新型实施例旨在提供一种避障系统及扫雪机器人,可解决现有技术中扫雪机器人避障系统稳定性差的技术问题。
2、本实用新型实施例解决其技术问题采用以下技术方案:
3、本申请公开的一种避障系统,包括:
4、接触式避障装置,接触式避障装置包括避障传感器,避障传感器设有常态下相互分离的静触点和动触点,静触点与动触点相对设置,动触点在外力作用下可与静触点电接触;
5、遥感避障装置,遥感避障装置设有用于接收障碍物所反射电磁波的接收机构;
6、自移动设备,接触式避障装置及遥感避障装置均设置于自移动设备;
7、控制装置,与所述接触式避障装置、遥感避障装置及自移动设备通讯连接,用于接触式避障装置或遥感避障装置触发时控制自移动设备做出避障动作。
8、本申请实施例将接触式避障装置及遥感避障装置与自移动设备通讯连接,当接触式避障装置或遥感避障装置任一遇到障碍物而触发时,控制装置控制自移动设备做出避障动作。这样,通过接触式避障装置与遥感避障装置相结合,只要两套避障系统有一个正常工作,就能实现避障功能,增加避障系统的可靠性。其中,接触式避障装置作为保险措施,在遥感避障装置信号不佳或精度降低时,避免自移动设备卡在障碍物处无法行进。
9、在本申请一种可能的实施方式中,避障传感器还包括用于固定静触点和动触点的支撑体,支撑体为可发生局部弹性形变的弹性件,静触点与动触点为沿长度方向固定于支撑体的柔性导体。
10、通过静触点和动触点在外力作用下产生电接触从而触发避障系统,通过障碍物与接触式避障装置直接接触来实现避障功能,降低对电磁波的依赖,使得避障系统的稳定性提升,在应对恶劣天气等复杂的工作环境时避障能力更为可靠。此外,现有避障传感器多采用在检测区分布压力传感器,以点接触的检测方式实现防碰撞检测,而本申请通过将动触点设置为长条状的柔性件,是的避障传感器上任意一点与障碍物接触时都会产生局部形变,从而与静触点接触触发避障系统,这样在避障传感器覆盖范围内形成连续的线接触检测带,相对于传统压力传感器点接触的检测方案精度更高,消除或减小了检测死角。
11、在一种可能的实施方式中,接收机构包括用于接收毫米波的雷达。在另一种可能的实施方式中,接收机构还包括摄像头。
12、通过毫米波与摄像头的结合,利用图像识别技术与雷达扫描以及接触式避障传感器相结合,是的不同场景下避障系统都能确保正常工作,提高避障系统的稳定性。
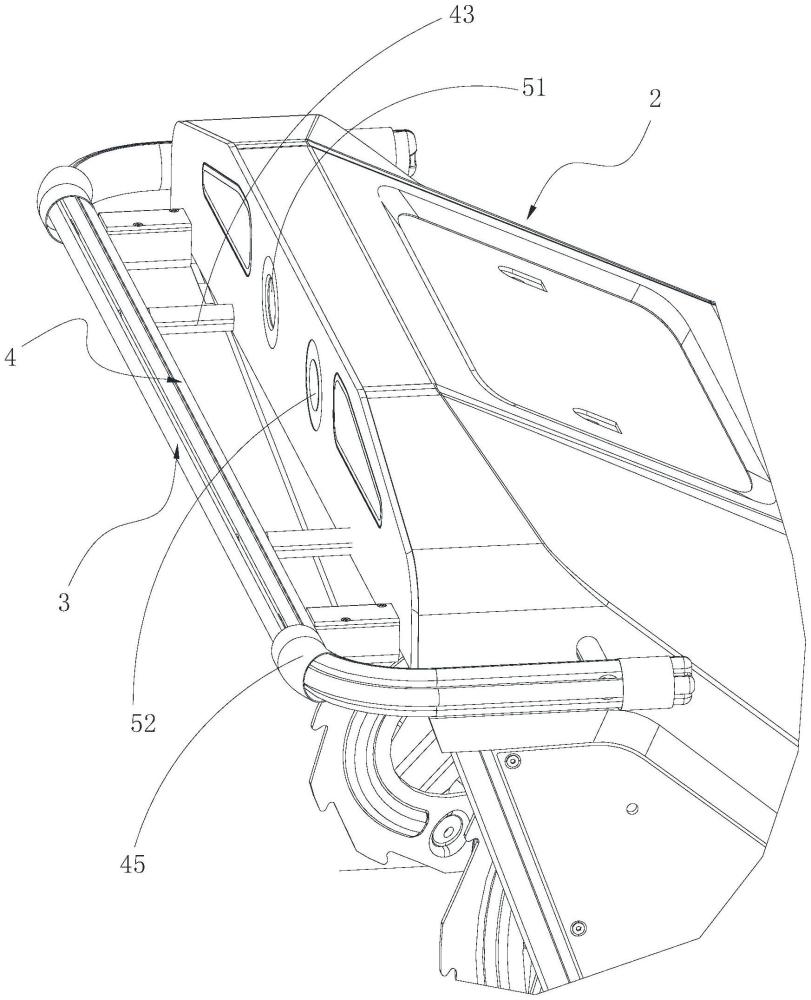
13、在一种可能的实施方式中,接触式避障装置包括防撞梁,避障传感器设置于防撞梁正面,防撞梁与遥感避障装置的电磁波接收路径错位设置。
14、这样通过将防撞梁与遥感避障装置的电磁波接收路径错位设置,避免防撞梁阻挡了遥感传感器接收来自障碍物发射的电磁波。
15、在一种可能的实施方式中,防撞梁设置于自移动设备前方,且凸出遥感避障装置一定距离设置。
16、通过将防撞梁凸出遥感避障装置一定距离设置,起到保护遥感避障装置的作用,避免遥感避障装置于障碍物碰撞而破损。
17、在一种可能的实施方式中,防撞梁设置于遥感避障装置下方。
18、在一种可能的实施方式中,支撑体为弹性管体,弹性管体为绝缘体,动触点于静触点沿长度方向设置于弹性管体的内壁。
19、通过将支撑体设为管体,动触点与静触点设置于管体内壁,使得避障传感器整体形成相对封闭的结构,对静触点和动触点起到保护作用,降低外部环境的影响,减少设备局的故障率,延长使用寿命。同时管状支撑体易于加工,生产成本低。
20、在一种可能的实施方式中,弹性管包括拱形的管顶及呈平面的管底,动触点固定设置于管顶内腔,静触点固定设置于管底内表面。
21、这样通过将弹性管顶部设置为拱形,使得动触点受到外部压力向内产生弹性形变能够产生更大的恢复力,采用这样的结构能够降低对弹性管体本身弹性能力的要求,既满足动触点在外力撤销后复位的要求,又从结构上增强设备的复位能力,提高产品的可靠性,降低对生产材料的要求,继而降低生产成本。
22、本申请实施例还公开了一种扫雪机器人,包括:
23、除雪装置,用于清除其行走路径上的积雪;
24、以及上述的避障系统,自移动设备与除雪装置固定连接,用于带动除雪装置行走;
25、接触式避障装置及遥感避障装置设置于除雪装置。
技术特征:1.一种避障系统,其特征在于,包括:
2.根据权利要求1所述的避障系统,其特征在于,所述避障传感器还包括用于固定所述静触点和所述动触点的支撑体,所述支撑体为可发生局部弹性形变的弹性件,所述静触点与所述动触点为沿长度方向固定于所述支撑体的柔性导体。
3.根据权利要求2所述的避障系统,其特征在于,所述接收机构包括用于接收毫米波的雷达。
4.根据权利要求2所述的避障系统,其特征在于,所述接收机构包括摄像头。
5.根据权利要求1所述的避障系统,其特征在于,所述接触式避障装置包括防撞梁,所述避障传感器设置于所述防撞梁正面,所述防撞梁与所述遥感避障装置的电磁波接收路径错位设置。
6.根据权利要求5所述的避障系统,其特征在于,所述防撞梁设置于所述自移动设备前方,且凸出所述遥感避障装置一定距离设置。
7.根据权利要求6所述的避障系统,其特征在于,所述防撞梁设置于所述遥感避障装置下方。
8.根据权利要求2所述的避障系统,其特征在于,所述支撑体为弹性管体,所述弹性管体为绝缘体,所述动触点于所述静触点沿长度方向设置于所述弹性管体的内壁。
9.根据权利要求8所述的避障系统,其特征在于,所述弹性管体包括拱形的管顶及呈平面的管底,所述动触点固定设置于所述管顶内腔,所述静触点固定设置于所述管底内表面。
10.一种扫雪机器人,其特征在于,包括:
技术总结本申请公开的本申请公开的一种避障系统及扫雪机器人,其中避障系统包括接触式避障装置和遥感避障装置,以及控制自移动设备做出避障动作的控制装置。接触式避障装置包括避障传感器,避障传感器设有常态下相互分离的静触点和动触点,静触点与动触点相对设置,动触点在外力作用下可与静触点电接触;遥感避障装置设有用于接收障碍物所反射电磁波的接收机构;本申请通过接触式避障装置与遥感避障装置相结合,只要两套避障系统有一个正常工作,就能实现避障功能,增加避障系统的可靠性。其中,接触式避障装置作为保险措施,在遥感避障装置信号不佳或精度降低时,避免自移动设备卡在障碍物处无法行进。技术研发人员:黄阳,朱涛涛,宋永琪,韦汉丰受保护的技术使用者:深圳汉阳科技有限公司技术研发日:20230713技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/55964.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表