挖掘机的操控模式控制系统及方法与流程
- 国知局
- 2024-07-09 17:08:27
本发明涉及电液控制,具体涉及一种挖掘机的操控模式控制系统及方法。
背景技术:
1、挖掘机是一种土石方施工工程机械,其作业工况主要是施工现场的挖掘作业和装载作业。挖掘机系统主要由发动机、泵、控制阀、油缸、马达、管路及其它附件组成,利用发动机驱动变量柱塞泵泵出的液压油驱动动臂油缸、斗杆油缸、铲斗油缸、回转马达以及行走马达等其它执行机构,实现动臂上升、下降,斗杆卸料、挖掘,铲斗挖掘、卸料和回转等动作。
2、针对不同用户群体和复杂多变的作业工况,目前单一挖机操控模式很难满足这一复杂情况下对于操控性能的需求,为解决以上问题,开发标准、敏捷、精细三种挖掘机操控模式,采用三种电控液压系统匹配方式,可以满足不同用户群体和复杂工况下对挖机操控性能的需求。
3、如中国专利公开号为cn115012469a,其公开了一种无档位控制、工况自适应液压挖掘机智能控制系统及方法,其具有恒定模式或智能模式,恒定模式用于应对轻载及应急工况;智能模式可以根据功率需求及其变化趋势,对主泵的功率进行修正,使发动机动力系统的输出功率能满足主泵的需求,同时工作在相对稳定的转速区间。但该方案操控模式多为单一模式,很难适应复杂多变的作业工况以及不同操控习惯的用户群体。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种挖掘机的操控模式控制系统及方法,通过开发标准、敏捷、精细三种挖掘机操控模式,可以满足不同操作习惯用户群体和不同工况下对挖机操控性能的需求。
2、本发明的技术方案为:
3、一种挖掘机的操控模式控制系统,包括如下模块:
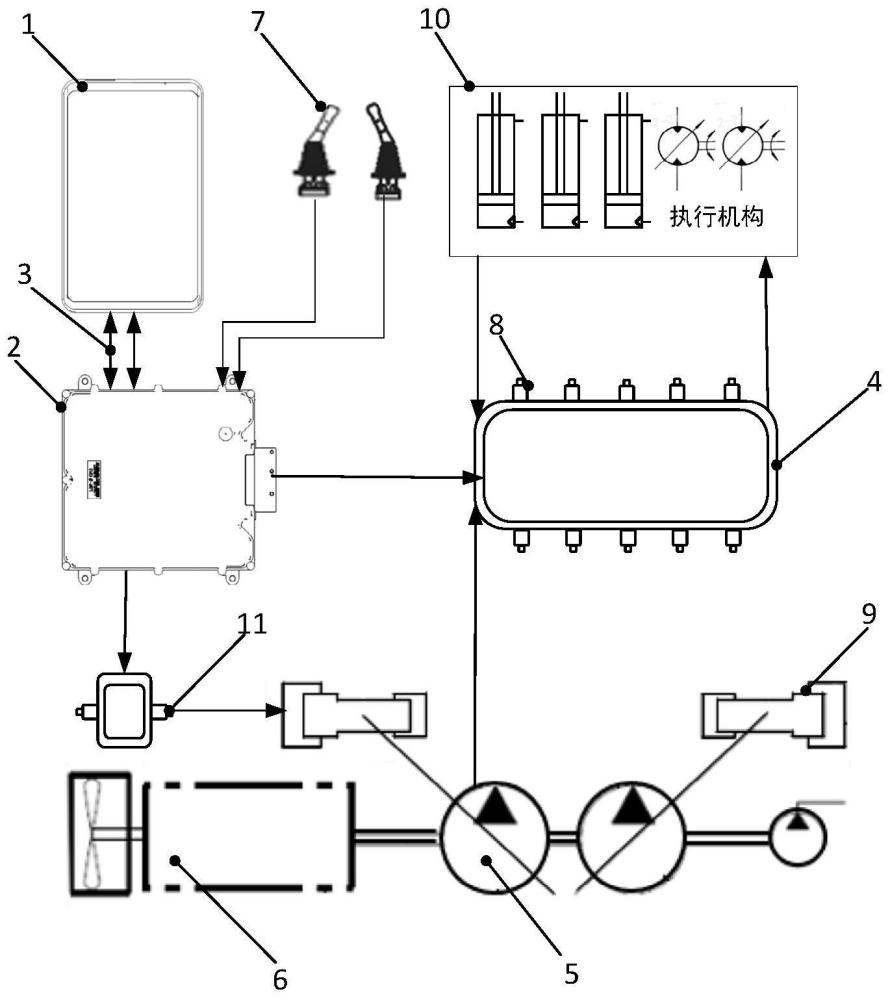
4、显示模块,用于显示挖掘机操控模式,操控模式分为标准模式、敏捷模式、精细模式;操作者通过显示模块选择不同的操控模式,并将输入信号通过总线发送至控制模块;
5、控制模块,用于接收总线的输入信息并进行识别判断,控制模块针对三种操控模式分别采用三种电控液压系统、分别建立主控阀及主泵控制参数数据库,且对每种操控模式分别进行性能调试,使操控模式实现性能最优;
6、动力执行模块,用于采集电控手柄操作信号发送模拟量信号,经过控制模块运算输出比例电磁阀电流:动力执行模块根据左电控手柄和右电控手柄的前后左右位移确定比例电磁阀的输出电流,从而调节动臂油缸、斗杆油缸、铲斗油缸、回转马达以及行走马达的动作速度。
7、本技术方案通过显示模块、控制模块和动力执行模块的协同工作,构成高度集成、智能化的挖掘机操控模式控制系统,具有灵活、高效、精确的特点,满足各种复杂的工作需求。其中,操作者通过显示模块选择挖掘机的工作模式:例如,选择标准模式以适用于一般挖掘工作,选择敏捷模式以适用于需要快速响应的情境,选择而精细模式以适用于需要高精度操作的场合。控制模块具有高度的智能和自主性,能够根据不同的模式动态调整系统的参数和性能;例如,当显示模块接收到操作者的输入信号后,控制模块会进行识别判断,并根据所选模式调整电控液压系统、主控阀及主泵的控制参数;例如,控制模块还会对每种操控模式进行性能调试,确保每种操控模式都能实现最优性能。动力执行模块用于确保控制模块的指令能够被准确、高效地执行,进一步提高挖掘机的操作性能和精度。动力执行模块经过控制模块的运算输出比例电磁阀的电流,该电流决定了各个油缸、马达的动作速度,从而精确地控制挖掘机的各项动作。
8、本发明的技术方案为:
9、一种挖掘机的操控模式控制方法,采用挖掘机的操控模式控制系统,包括以下步骤:
10、s100、通过挖掘机的显示模块进行标准模式、敏捷模式、精细模式的选择切换,操控模式切换后,通过总线实现操控模式输入信号的传输;
11、s200、控制模块接收总线上的输入信号并进行识别判断,保持当前操控模式并根据当前模式调用相应主控阀及主泵控制参数数据库的参数,并进行控制运算;
12、s300、控制模块依据相关算法将电控手柄信号转换为主控阀和主泵比例电磁阀(11)电流,通过控制比例电磁阀来调节液压油的流向以及流量,最终控制挖掘机工作装置执行相应动作。
13、本技术方案通过挖掘机的显示模块,操作员可以选择操作模式以满足不同工作场景的需求:
14、标准模式:适用于大部分常规挖掘作业,提供稳定和可靠的操作性能;
15、敏捷模式:强调挖掘机的快速响应能力,适用于需要快速移动或细微调整的作业;
16、精细模式:强调挖掘机的精细控制能力,适用于需要高精度作业的场合。
17、在其中一些实施例中,所述步骤s100包括如下小步:
18、s110、通过显示模块和控制模块相互协调,显示模块界面用于显示挖掘机操控模式,分为标准模式、敏捷模式、精细模式;
19、s120、根据实际作业工况以及操作习惯选择不同的操控模式;
20、s130、显示模块将当前操控模式通过总线发送至控制模块。
21、在其中一些实施例中,所述步骤s200包括如下小步:
22、s210、控制模块通过挖掘机总线接收显示模块报文信息;
23、s220、控制模块对报文信息进行识别判断,解析当前操控模式信息;
24、s230、判断挖掘机操控模式是否改变:
25、如果未改变,则进入下一步骤s240;
26、如果已改变,则进入上一步骤s220,重新对操控模式进行识别;
27、s240、如果操控模式持续不变,则下次重新上电为当前记忆的操控模式信息,无需每次上电重新进行模式设定;
28、s250、根据当前操控模式调用相应主控阀及主泵控制参数数据库参数,三种操控模式采用三种电控液压系统匹配方式,实现挖掘机在标准模式、敏捷模式和精细模式下均为性能最优。
29、在其中一些实施例中,所述步骤s300包括如下小步:
30、s310、电控手柄根据当前位置发送模拟量信号,控制模块识别并接收来自电控手柄的信号,对信号进行滤波处理;
31、s320、控制模块根据电控手柄的前后左右位移百分比计算主阀芯先导压力数值,依据主控阀和主泵比例电磁阀的先导压力/比例电磁阀换算公式来确定挖掘机执行机构比例电磁阀的输出电流;
32、s330、将目标电磁阀电流值与反馈的电磁阀实际电流进行对比,通过控制模块内部pid控制算法输出实际控制电流;
33、s340、通过调节挖掘机动臂、斗杆、铲斗、回转、行走主控阀阀芯先导压力的大小,推动主控阀阀芯位移控制液压油流向和流量,同时主泵电磁阀控制斜盘角度调节器来调节主泵排量大小;
34、s350、主控阀通过控制液压油的流量和流向来调节动臂油缸、斗杆油缸、铲斗油缸、回转马达以及行走马达的执行动作以及速度。
35、在其中一些实施例中,所述步骤s100中,标准模式包括如下内容:
36、a1、建立标准模式控制参数数据库:电控手柄动作信号百分比对应主控阀比例电磁阀先导压力点参数库pl[]和主泵需求排量点参数库ql[];
37、a2、标准模式下的主控阀控制:标准模式下挖掘机动作速度较为中和,电控手柄信号百分比与比例电磁阀先导压力拟合曲线呈一次函数关系:
38、pl=kl1·x+bl1其中:kl1、bl1分别为标准模式比例电磁阀先导压力系数,且kl1>0,bl1>0;
39、x为电控手柄信号百分比;pl为标准模式主控阀比例电磁阀先导压力;
40、a3、标准模式下的主泵控制:挖掘机主泵排量影响动作速度快慢,电控手柄信号百分比与主泵排量拟合曲线呈一次函数关系:
41、ql=kl2·x+bl2
42、其中:kl2、bl2分别为标准模式主泵排量系数,且kl2>0,bl2>0;
43、x为电控手柄信号百分比;ql为标准模式主泵排量。
44、本技术方案中,标准模式适用于大部分常规挖掘作业,提供稳定和可靠的操作性能。其通过建立标准模式控制参数数据库,实现了电控手柄动作信号与主控阀和主泵控制参数的精确映射关系;标准模式下的主控阀控制和主泵控制均遵循一次函数关系,以确保挖掘机动作速度的稳定和准确性;该控制方法有助于提高挖掘机的操控性能和作业效率,满足不同工程需求。
45、在其中一些实施例中,所述步骤s100中,敏捷模式包括如下内容:
46、b1、建立敏捷模式控制参数数据库:电控手柄动作信号百分比对应主控阀比例电磁阀先导压力点参数库pm[]和主泵需求排量点参数库qm[];
47、b2、敏捷模式下的响应速度:基于标准模式,提高主控阀主泵比例电磁阀的pid控制响应速度;
48、b3、敏捷模式下的主控阀控制:敏捷模式相比于标准模式,挖掘机动作速度和响应更快,电控手柄信号百分比与比例电磁阀先导压力拟合曲线呈二次函数关系:
49、pm=km1·x2+bm1·x+cm1
50、其中:km1、bm1、cm1分别为敏捷模式比例电磁阀先导压力系数,且km1<0,bm1>0,cm1>0;
51、x为电控手柄信号百分比;pm为敏捷模式主控阀比例电磁阀先导压力;
52、b4、敏捷模式下的主泵控制:敏捷模式电控手柄信号百分比与主泵排量拟合曲线呈二次函数关系:
53、qm=km2·x2+bm2·x+cm2
54、其中:km2、bm2、cm2分别为敏捷模式主泵排量系数,且km2<0,bm2>0,cm2>0;
55、x为电控手柄信号百分比,qm为敏捷模式主泵排量;
56、b5、敏捷模式下的掉速解决:采用主泵比例控制调节,设定目标发动机转速nt,通过发动机反馈的实际转速na形成闭环控制;
57、检测到实际发动机转速低于目标转速时,降低主泵排量减小发动机负载;
58、计算发动机转速差值:en=nt-na;
59、主泵排量比例控制:qn=qn-1-en;
60、其中:en为发动机转速差值,nt为目标发动机转速,na为实际发动机转速,qn为主泵当前排量,qn-1为主泵上一次排量。
61、本技术方案中,敏捷模式强调挖掘机的快速响应能力,适用于需要快速移动或细微调整的作业。其通过建立敏捷模式控制参数数据库,实现了电控手柄动作信号与主控阀和主泵控制参数的精确映射关系;在敏捷模式下,主控阀和主泵的控制采用更快的pid控制响应速度,以提升挖掘机的动作速度和响应能力。此外,敏捷模式下的主控阀和主泵控制均遵循二次函数关系,有助于进一步提高挖掘机动作的准确性和稳定性。为解决挖掘机在工作中可能出现的掉速问题,敏捷模式还采用了主泵比例控制调节,通过闭环控制来确保发动机转速的稳定,该控制方法有助于提高挖掘机的操控性能和作业效率,特别是在需要快速响应和细微调整的工程中具有显著优势。
62、在其中一些实施例中,所述步骤s100中,精细模式包括如下内容:
63、c1、建立精细模式控制参数数据库:电控手柄动作信号百分比对应主控阀比例电磁阀先导压力点参数库pn[]和主泵需求排量点参数库qn[];
64、c2、精细模式下的响应速度:基于标准模式,降低主控阀和主泵比例电磁阀的pid控制响应速度;
65、c3、精细模式下的主控阀控制:精细模式相比于标准模式,挖掘机动作速度和响应更慢,电控手柄信号百分比与比例电磁阀先导压力拟合曲线呈二次函数关系:
66、pn=kn1·x2+cn1
67、其中:kn1、cn1分别为精细模式比例电磁阀先导压力系数,且kn1>0,cn1>0;
68、x为电控手柄信号百分比;pn为精细模式主控阀比例电磁阀先导压力;
69、c4、精细模式下的主泵控制:基于标准模式降低主泵最大排量qmax,降低挖掘机动作速度,提高整机动作柔和性和精确性;
70、精细模式电控手柄信号百分比与主泵排量拟合曲线呈二次函数关系:
71、qn=kn2·x2+cn2其中:kn2、cn2分别为精细模式主泵排量系数,且kn2>0,cn2>0;
72、x为电控手柄信号百分比,qn为精细模式主泵排量。
73、本技术方案中,精细模式强调挖掘机的精细控制能力,适用于需要高精度作业的场合。其通过建立精细模式控制参数数据库,实现电控手柄动作信号与主控阀和主泵控制参数的精确映射关系;在精细模式下,主控阀和主泵的控制采用降低的pid控制响应速度,以减小挖掘机的动作速度和响应,提高控制的精确性和稳定性;精细模式下的主控阀和主泵控制均遵循二次函数关系,这有助于进一步优化挖掘机动作的准确性和柔和性。此外,精细模式还通过降低主泵的最大排量来降低挖掘机动作速度,提高整机动作的柔和性和精确性,该控制方法有助于提高挖掘机的操控性能和作业精度,特别是在需要高精度作业的场合中具有显著优势。
74、本发明与现有技术相比,具有以下有益效果:
75、本发明通过挖掘机显示模块进行标准模式、敏捷模式、精细模式的选择切换,三种操控模式采用三种电控液压系统匹配方式,标准模式挖掘机操控性较为中和,大约可以满足80%的用户;敏捷模式操控速度较快,针对矿山大客户等作业效率要求较高的用户;精细模式操控性较为柔和,适合进行挖掘机精细作业;挖掘机采用标准、敏捷、精细三种操控模式控制技术,可以满足不同操作习惯用户群体和不同工况下对挖机操控性能的需求。
本文地址:https://www.jishuxx.com/zhuanli/20240617/56872.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表