一种打磨机器人的制作方法
- 国知局
- 2024-06-20 15:34:39
本申请涉及工件打磨技术的领域,尤其是涉及一种打磨机器人。
背景技术:
1、钢轨是各类轨道的主要组成部件。它的功用在于引导车轮的前进,承受车轮的巨大压力,并将压力传递到轨枕上。
2、目前,在进行钢轨的焊接作业时,常需要对钢轨焊缝进行打磨。由于钢轨及焊缝形态具有其特殊性,即钢轨全轮廓为复杂异形曲面,同时又存在钢轨外观尺寸有不同误差、焊接时存在错边、加工相容度不高等问题,采用常规数控铣床基本难以达到焊缝区域与母材平顺过渡的质量要求。因此,目前焊缝粗打磨基本上采用数控铣床及人工手持式砂轮机打磨,但该方案依旧难以达到全轮廓平顺过渡的目的,特别是人工打磨完全取决于工人实操水平,无法保持恒定的打磨质量,使得批量钢轨的焊缝打磨质量参差不齐,亟需改进。
技术实现思路
1、为了提高批量钢轨焊缝的打磨质量,本申请提供一种打磨机器人。
2、本申请提供的一种打磨机器人采用如下的技术方案:
3、一种打磨机器人,包括多关节机械手和刀库,所述多关节机械手连接有柔性力控法兰,所述柔性力控法兰上设置有电主轴,所述刀库中搁置有若干与所述电主轴可拆连接的刀具。
4、通过采用上述技术方案,设置的多关节机械手能够通过姿态调节而进行电主轴的位置调整,从而使得电主轴上的刀具适应钢轨焊接处的复杂异性曲面,而电主轴还能于刀库中进行刀具的更换调整,以便多电主轴在多关节机械手的驱动下,沿钢轨的焊缝轨迹轮廓,以适宜尺寸的刀具对钢轨的焊接处进行高效精细打磨,提高钢轨焊缝打磨质量的同时,还保障批量钢轨的焊缝打磨质量较为统一。
5、可选的,所述多关节机械手包括基座以及多个活动臂,多个活动臂依次连接,且相邻两活动臂之间设置有驱使活动臂活动的驱动件,位于首端的所述活动臂与基座转动连接,位于末端的所述活动臂与所述柔性力控法兰相连接。
6、通过采用上述技术方案,设置的基座能够为多个活动臂提供稳定的支撑基础,而多个活动臂能够进行空间内的多轴旋转,使得多关节机械手能够带动刀具以适配钢轨焊缝轨迹的运行路线和打磨角度进行焊缝的高质量打磨。
7、可选的,所述基座上固定有若干定位板,所述定位板底面固定有若干定位柱,所述定位板表面开设有若干安装孔。
8、通过采用上述技术方案,在进行基座与外部支撑架、地面基础等支撑基础进行安装时,通过将安装柱插入支撑基础的适配定位孔内,即可将基座精准的预定位于支撑基础上;而后通过向安装孔中穿入膨胀螺栓等锁紧件,并通过锁紧件将定位板锁定于支撑基础上,即可实现基座的稳定安装定位。
9、可选的,还包括用于对工件进行平顺度及打磨深度检测的传感器、用于对传感器的检测数据进行数据保存和上传的数据采集器、用于调节所述多关节机械手的姿态以及控制所述打电主轴的运行的控制器。
10、通过采用上述技术方案,设置的传感器能够对工件进行平顺度及打磨深度进行检测和复合,从而通过数据采集器对打磨质量进行数据记录,便于把控工件的打磨质量。
11、可选的,所述刀库包括刀架以及设置在刀架上用于可拆卸装夹刀具的安装组件。
12、通过采用上述技术方案,设置的安装组件能够将刀具准确的定位于刀架上,便于电主轴精准进行刀具的更换。
13、可选的,所述安装组件包括支撑板以及弹力片,所述支撑板固定于刀架,所述弹力片于支撑板上间隔固定有两个,两所述弹力片之间围成刀具装夹腔。
14、通过采用上述技术方案,设置的两弹力片能够对刀具进行快速装夹,使得刀具被稳定的定位于刀架上。
15、可选的,所述支撑板上活动设置有用于覆盖所述刀具的防尘罩。
16、通过采用上述技术方案,在未进行工件打磨时,通过防尘罩对刀架上的刀具进行覆盖防尘处理,以保障刀具的清洁。
17、可选的,支撑板转动设置于所述刀架上,所述刀架上设置有用于驱使所述支撑板转动的动力件,多个所述安装组件以支撑板的转动中心为圆心呈环形分布于支撑板表面。
18、通过采用上述技术方案,设置的动力件能够支撑板进行转动,以使刀具在支撑板的带动下停滞于指定位置处,方便多关节机械手进行刀具的更新。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.设置的多关节机械手能够调节电主轴的姿态,从而使得电主轴上的刀具适应钢轨焊接处的复杂异性曲面,而电主轴还能于刀库中进行刀具的更换调整,以便多电主轴在多关节机械手的驱动下,沿钢轨的焊缝轨迹轮廓,以适宜尺寸的刀具对钢轨的焊接处进行高效精细打磨,提高钢轨焊缝打磨质量的同时,还保障批量钢轨的焊缝打磨质量较为统一;
21、2.设置的两弹力片能够对刀具进行快速装夹,使得刀具被稳定的定位于刀架上;
22、3.设置的动力件能够支撑板进行转动,以使刀具在支撑板的带动下停滞于指定位置处,方便多关节机械手进行刀具的更新。
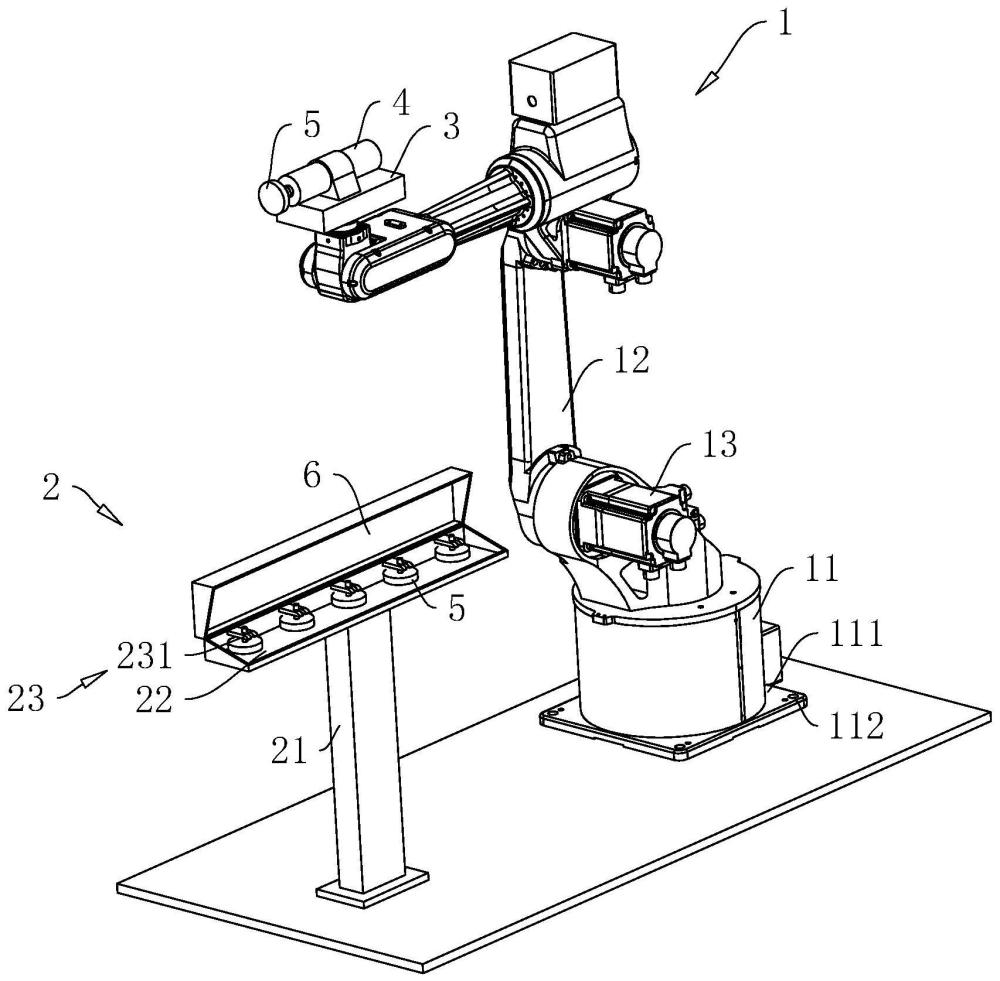
技术特征:1.一种打磨机器人,其特征在于:包括多关节机械手(1)和刀库(2),所述多关节机械手(1)末端连接有柔性力控法兰(3),所述柔性力控法兰(3)上设置有电主轴(4),所述刀库(2)中搁置有若干供所述电主轴(4)可拆连接的刀具(5)。
2.根据权利要求1所述的一种打磨机器人,其特征在于:所述多关节机械手(1)包括基座(11)以及多个活动臂(12),多个活动臂(12)依次连接,且相邻两活动臂(12)之间设置有驱使活动臂(12)活动的驱动件(13),位于首端的所述活动臂(12)与基座(11)转动连接,位于末端的所述活动臂(12)与所述柔性力控法兰(3)相连接。
3.根据权利要求1所述的一种打磨机器人,其特征在于:还包括用于对工件进行平顺度及打磨深度检测的传感器、用于对传感器的检测数据进行数据保存的数据采集器。
4.根据权利要求1所述的一种打磨机器人,其特征在于:所述刀库(2)包括刀架(21)以及设置在刀架(21)上用于装卸刀具(5)的安装组件。
5.根据权利要求4所述的一种打磨机器人,其特征在于:所述安装组件包括支撑板(22)以及多个装夹组(23),所述支撑板(22)设置于所述刀架(21)上,所述装夹组(23)包括间隔固定于支撑板(22)的两弹力片(231),两所述弹力片(231)之间围成刀具(5)装夹腔。
6.根据权利要求5所述的一种打磨机器人,其特征在于:所述支撑板(22)上设置有用于覆盖所述刀具(5)的防尘罩(6)。
7.根据权利要求5所述的一种打磨机器人,其特征在于:支撑板(22)转动设置于所述刀架(21)上,所述刀架(21)上设置有用于驱使所述支撑板(22)转动的动力件(24),多个所述装夹组(23)以支撑板(22)的转动中心为圆心呈环形分布于支撑板(22)表面。
8.根据权利要求2所述的一种打磨机器人,其特征在于:所述基座(11)上固定有定位板(111),所述定位板(111)表面开设有若干安装孔(112)。
技术总结本申请涉及工件打磨技术的领域,具体公开了一种打磨机器人,其包括多关节机械手和刀库,所述多关节机械手连接有柔性力控法兰,所述柔性力控法兰上设置有电主轴,所述刀库中搁置有若干与所述电主轴可拆连接的刀具。本申请具有提高批量钢轨焊缝的打磨质量的效果。技术研发人员:李凡,马晓阳,黄潇,丁建华,洪忠峰,孙佳俊,黄雷,马志海受保护的技术使用者:上海瑞纽机械股份有限公司技术研发日:20231012技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240619/12201.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表