一种新型智能无人飞行器的制作方法
- 国知局
- 2024-07-17 13:05:20
本技术涉及无人飞行器,具体为一种新型智能无人飞行器。
背景技术:
1、无人飞行器可以通过遥控指挥的方式,使得飞行器在飞行过程中完成相应的任务,降低任务执行难度,提高任务执行的效率。现代科学技术的发展,使得无人飞行器应用在广大领域,执行更多类型的任务,提高生产效率。
2、现有的智能无人飞行器在使用时,缺少探测空中障碍物的设备,使得无人飞行器在飞行过程中容易撞击到障碍物,进而造成损坏,同时,现有的无人飞行器在使用时,缺少标记飞行器起降区域的装置,使得无人飞行器在起降过程中不能对周围环境进行标记提示,周围人员或者障碍物不能及时撤离,影响无人飞行器的起降。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种新型智能无人飞行器,克服了现有的智能无人飞行器在使用时,缺少探测空中障碍物的设备,使得无人飞行器在飞行过程中容易撞击到障碍物,进而造成损坏的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
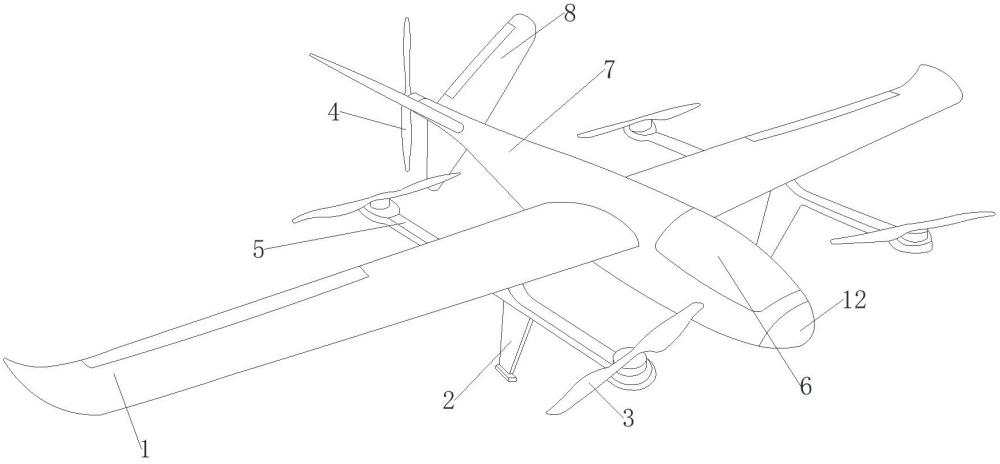
3、一种新型智能无人飞行器,包括机架,机架前侧上端设置有防护盖,机架前端设置有毫米波雷达,机架两侧对称设置有机翼,机翼下侧面设置有支撑杆,机翼下侧面对应支撑杆位置设置有卡位槽,机翼下侧面设置有螺纹杆,螺纹杆下端设置有固定螺帽,机翼远离机架一端下侧面设置有线条激光灯,机翼下侧靠近机架位置设置有加强板。
4、作为本实用新型的一种优选技术方案,支撑杆两端上侧设置有升力电机,升力电机上侧设置有升力桨。
5、作为本实用新型的一种优选技术方案,支撑杆下侧面设置有起落架,机架远离毫米波雷达一端设置有推力桨。
6、作为本实用新型的一种优选技术方案,机架靠近推力桨位置设置有推力电机,机架远离毫米波雷达一端外环侧设置有导向翼。
7、作为本实用新型的一种优选技术方案,起落架与支撑杆焊接,支撑杆与升力电机通过螺钉连接。
8、作为本实用新型的一种优选技术方案,机翼与机架通过加强板和螺栓连接,机翼与支撑杆通过螺纹杆和固定螺帽连接。
9、作为本实用新型的一种优选技术方案,防护盖与机架通过螺钉连接,毫米波雷达与机架通过螺钉连接,机架内侧设置有控制模块和蓄电池。
10、本实用新型通过设置的毫米波雷达,使得智能无人飞行器在使用时,毫米波雷达可以探测空中障碍物,使得无人飞行器在飞行过程中及时发现障碍物,进而避免撞击到障碍物造成损坏;
11、本实用新型通过设置的线条激光灯,使得无人飞行器在起降过程中,通过线条激光灯标记出起降区域,使得周围人员或者障碍物可以及时撤离,保证无人飞行器的顺利起降。
技术特征:1.一种新型智能无人飞行器,包括机架(7),其特征在于:所述机架(7)前侧上端设置有防护盖(6),机架(7)前端设置有毫米波雷达(12),机架(7)两侧对称设置有机翼(1),机翼(1)下侧面设置有支撑杆(5),机翼(1)下侧面对应支撑杆(5)位置设置有卡位槽,机翼(1)下侧面设置有螺纹杆(10),螺纹杆(10)下端设置有固定螺帽(11),机翼(1)远离机架(7)一端下侧面设置有线条激光灯(14),机翼(1)下侧靠近机架(7)位置设置有加强板(13)。
2.根据权利要求1所述的一种新型智能无人飞行器,其特征在于:所述支撑杆(5)两端上侧设置有升力电机(9),升力电机(9)上侧设置有升力桨(3)。
3.根据权利要求2所述的一种新型智能无人飞行器,其特征在于:所述支撑杆(5)下侧面设置有起落架(2),机架(7)远离毫米波雷达(12)一端设置有推力桨(4)。
4.根据权利要求3所述的一种新型智能无人飞行器,其特征在于:所述机架(7)靠近推力桨(4)位置设置有推力电机,机架(7)远离毫米波雷达(12)一端外环侧设置有导向翼(8)。
5.根据权利要求3所述的一种新型智能无人飞行器,其特征在于:所述起落架(2)与支撑杆(5)焊接,支撑杆(5)与升力电机(9)通过螺钉连接。
6.根据权利要求1所述的一种新型智能无人飞行器,其特征在于:所述机翼(1)与机架(7)通过加强板(13)和螺栓连接,机翼(1)与支撑杆(5)通过螺纹杆(10)和固定螺帽(11)连接。
7.根据权利要求1所述的一种新型智能无人飞行器,其特征在于:所述防护盖(6)与机架(7)通过螺钉连接,毫米波雷达(12)与机架(7)通过螺钉连接,机架(7)内侧设置有控制模块和蓄电池。
技术总结本技术公开了一种新型智能无人飞行器,包括机架,机架前侧上端设置有防护盖,机架前端设置有毫米波雷达,机架两侧对称设置有机翼,机翼下侧面设置有支撑杆,机翼下侧面对应支撑杆位置设置有卡位槽,机翼下侧面设置有螺纹杆,螺纹杆下端设置有固定螺帽,机翼远离机架一端下侧面设置有线条激光灯,机翼下侧靠近机架位置设置有加强板。本技术通过设置的毫米波雷达,使得智能无人飞行器在使用时,毫米波雷达可以探测空中障碍物,使得无人飞行器在飞行过程中及时发现障碍物,进而避免撞击到障碍物造成损坏。技术研发人员:施佳腾受保护的技术使用者:浙江德疆科技有限公司技术研发日:20231122技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/107982.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
无人机测试平台的制作方法
下一篇
返回列表