螺旋焊接钢管焊缝打磨机器人生产线的制作方法
- 国知局
- 2024-07-17 13:06:41
本技术涉及钢管焊缝打磨生产线,尤其是螺旋焊接钢管焊缝打磨机器人生产线。
背景技术:
1、螺旋焊管是将低碳碳素结构钢或低合金结构钢钢带按照一定的螺旋线的角度卷成管坯,然后将管缝焊接起来制成,采用这种方式可以用较窄的带钢生产大直径的钢管。与直缝焊管技术相比,螺旋焊管焊接时不易产生丁字焊缝,因此存在焊缝缺陷的几率比较小,使用安全性较高。螺旋焊管焊接产生的焊缝需要进行打磨,一般采用人工使用打磨机进行打磨,钢管上料和下料比较麻烦,影响生产效率的提高,同时由于螺旋焊管的焊缝为螺旋线,所以钢管两端的焊缝起点位置并不在一条直线上,所以不能同时对螺旋焊接钢管的两端进行打磨,需要先对其一端进行焊缝打磨完成后,再对另一端进行打磨,整个生产线需要对钢管进行多次挪移定位,严重影响螺旋钢管焊缝打磨效率的提高。
技术实现思路
1、本实用新型的目的在于提供螺旋焊接钢管焊缝打磨机器人生产线,用于解决现有技术中螺旋焊接钢管焊缝打磨的生产线存在打磨效率低、钢管移位不方便的技术问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、螺旋焊接钢管焊缝打磨机器人生产线,包括两个机器人以及位于两机器人之间的两组旋转组件和传送组件,两个机器人的机械臂上均安装打磨头且分别对钢管两端的焊缝进行打磨,每组旋转组件和传送组件均包含至少两个旋转组件和两个传送组件,所述旋转组件用于对钢管承托并驱动其旋转,所述传送组件用于对钢管承托并对其进行沿钢管轴线方向的平移。
4、进一步的,所述旋转组件包括用于共同承托钢管的主动辊和从动辊,所述主动辊通过主动支架相对转动安装在升降台上,所述从动辊通过从动支架相对转动安装在升降台上,所述主动辊通过固定在升降台上的旋转动力部驱动旋转,所述主动支架和从动支架分别滑动安装在升降台上,所述升降台升降安装在旋转底座上。
5、进一步的,所述主动支架通过滑块滑动安装在主动滑轨上,所述从动支架通过滑块滑动安装在从动滑轨上,所述主动滑轨和从动滑轨均安装在升降台上,所述主动支架与主动丝杆螺纹连接,所述从动支架与从动丝杆螺纹连接,所述主动丝杆和从动丝杆分别由主动动力部和从动动力部驱动旋转,所述主动动力部和从动动力部均安装在升降台上。
6、进一步的,所述旋转底座上安装升降动力部,所述升降动力部的动力端与升降台安装,所述升降台还安装至少一个导杆,该导杆与安装在旋转底座上的衬套滑动安装。
7、进一步的,所述传送组件包括传送底座,所述传送底座上安装v型辊,该v型辊两端转动安装在传送底座上,所述v型辊一端与传送动力部的动力端同轴连接,所述传送动力部安装在传送底座上。
8、进一步的,两个机器人包括首端机器人和尾端机器人,所述首端机器人与相邻的传送组件之间的支架上安装首端传感器,所述尾端机器人与相邻的传送组件之间的支架上安装的打磨头上安装尾端传感器。
9、进一步的,所述打磨头包括框架、安装在框架上的打磨电机和由打磨电机驱动做回转运动的砂带。
10、与现有技术相比,本实用新型的技术方案具有以下有益效果:
11、(1).本实用新型通过设置两个机器人以及在两个机器人之间设置若干组旋转组件和传送组件,便于对螺旋钢管的两端分别进行焊缝打磨作业,通过旋转组件便于驱动钢管旋转,以利于打磨头上的传感器寻找识别焊缝,通过传送组件便于对钢管一端焊缝打磨完毕后,快速实现钢管沿轴线方向传送移位,从而提高钢管在焊缝打磨工序上转移效率,进而提高螺旋钢管焊缝的打磨效率;
12、(2).本实用新型通过设置主动辊和从动辊,由主动辊驱动钢管旋转,进而由从动辊配合钢管转动,实现对钢管旋转,便于机器人驱动打磨头上的传感器对旋转状态钢管上的焊缝进行识别;
13、(3).本实用新型通过设置主动支架和从动支架沿升降台往复滑动安装,实现主动辊和从动辊之间间距的调节,进而适用于对不同直径的钢管进行承托使其旋转,装置适用性更广;
14、(4).本实用新型通过设置升降台与旋转底座为升降安装,实现升降台的高度调节,进而调节钢管的高度;
15、(5).本实用新型通过设置首端传感器和尾端传感器,用于对传送组件对钢管传送时进行位移监测,监测到钢管到达设定位置时,传送组件停止传送,实现自动化作业。
技术特征:1.螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,包括两个机器人以及位于两机器人之间的两组旋转组件(300)和传送组件(200),每组旋转组件(300)和传送组件(200)均包含至少两个旋转组件(300)和两个传送组件(200),两个机器人的机械臂上均安装打磨头(101)且分别对钢管两端的焊缝进行打磨,所述旋转组件(300)用于对钢管承托并驱动其旋转,所述传送组件(200)用于对钢管承托并对其进行沿钢管轴线方向的平移。
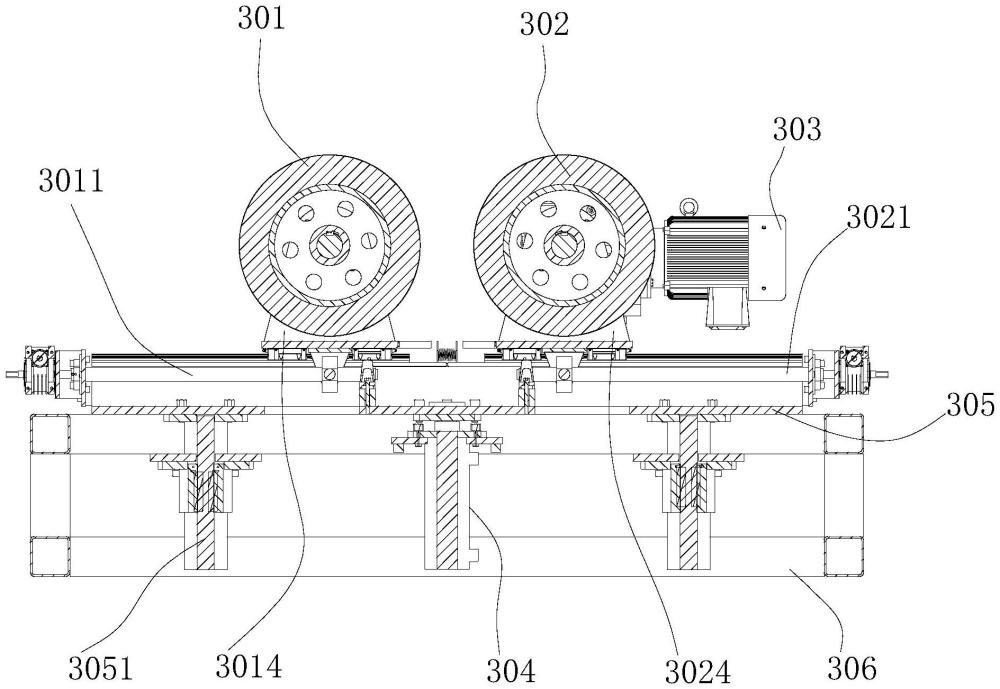
2.根据权利要求1所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,所述旋转组件(300)包括用于共同承托钢管的主动辊(302)和从动辊(301),所述主动辊(302)通过主动支架(3024)相对转动安装在升降台(305)上,所述从动辊(301)通过从动支架(3014)相对转动安装在升降台(305)上,所述主动辊(302)通过固定在升降台(305)上的旋转动力部(303)驱动旋转,所述主动支架(3024)和从动支架(3014)分别滑动安装在升降台(305)上,所述升降台(305)升降安装在旋转底座(306)上。
3.根据权利要求2所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,所述主动支架(3024)通过滑块滑动安装在主动滑轨(3023)上,所述从动支架(3014)通过滑块滑动安装在从动滑轨(3013)上,所述主动滑轨(3023)和从动滑轨(3013)均安装在升降台(305)上,所述主动支架(3024)与主动丝杆(3021)螺纹连接,所述从动支架(3014)与从动丝杆(3011)螺纹连接,所述主动丝杆(3021)和从动丝杆(3011)分别由主动动力部和从动动力部驱动旋转,所述主动动力部和从动动力部均安装在升降台(305)上。
4.根据权利要求3所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,所述旋转底座(306)上安装升降动力部,所述升降动力部的动力端与升降台(305)安装,所述升降台(305)还安装至少一个导杆(3051),该导杆(3051)与安装在旋转底座(306)上的衬套滑动安装。
5.根据权利要求1-4任一所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,所述传送组件(200)包括传送底座(203),所述传送底座(203)上安装v型辊(201),该v型辊(201)两端转动安装在传送底座(203)上,所述v型辊(201)一端与传送动力部(202)的动力端同轴连接,所述传送动力部(202)安装在传送底座(203)上。
6.根据权利要求5所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,两个机器人包括首端机器人(100)和尾端机器人(400),所述首端机器人(100)与相邻的传送组件(200)之间的支架上安装首端传感器(500),所述尾端机器人(400)与相邻的传送组件(200)之间的支架上安装的打磨头(101)上安装尾端传感器(600)。
7.根据权利要求6所述的螺旋焊接钢管焊缝打磨机器人生产线,其特征在于,所述打磨头(101)包括框架、安装在框架上的打磨电机和由打磨电机驱动做回转运动的砂带。
技术总结本技术涉及钢管焊缝打磨生产线技术领域,尤其是螺旋焊接钢管焊缝打磨机器人生产线,包括两个机器人以及位于两机器人之间的若干组旋转组件和传送组件,两个机器人的机械臂上均安装打磨头且分别对钢管两端的焊缝进行打磨,所述旋转组件用于对钢管承托并驱动其旋转,所述传送组件用于对钢管承托并对其进行沿钢管轴线方向的平移,用于解决现有技术中螺旋焊接钢管焊缝打磨的生产线存在打磨效率低、钢管移位不方便的技术问题。技术研发人员:周巍峰,闫春江,袁成,周广炼受保护的技术使用者:豪德博尔(山东)智能装备有限公司技术研发日:20231127技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/108126.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表