一种轨道AGV小车底盘的制作方法
- 国知局
- 2024-08-01 08:52:00
本技术涉及轨道agv小车底盘,具体为一种轨道agv小车底盘。
背景技术:
1、目前,我国的温室大棚种植技术已经成熟,许多地方都开始进行温室大棚种植,大棚种植的面积也越来越大。对于大型的大棚种植来说,到了收获的时节,蔬菜果实的运输就变成了一个困扰农民的问题。对于小型大棚,依靠人力运输的方式效率相对比较高,但对于大型大棚,其运输效率极低,而且工作量大,随着我国城市化进程的加快,农村青少年劳动力匮乏的问题日益严重。到了收获时节,需要尽可能在短时间内把蔬菜果实运到消费市场。此时,机械运输就可以有效的解决这个问题,并且更加有效地降低雇用大量劳动力的成本。
2、在国外,荷兰、日本等国家在大型连栋温室内铺设轨道,运输车行走于轨道之上,并通过轨道实现导向,从而代替人工实现物料机械搬运。但是,受限于我国现阶段设施农业发展特点,即小型温室狭窄、温室内部铺设轨道改造成本较高、设备购置和维修资金投入有限,国外轨道式运输车结构不能充分满足实际使用要求。而国内现有的小车底盘存在一些限制,例如转弯半径较大、能耗高、运动平稳性不足等问题,因此,现提供一种轨道agv小车底盘。
技术实现思路
1、本实用新型的目的在于提供一种轨道agv小车底盘,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种轨道agv小车底盘,包括底盘框架,所述底盘框架的底端安装有伺服电机一和伺服电机二,所述伺服电机一的一侧安装有直角行星减速机一,所述伺服电机二的一侧安装有直角行星减速机二,所述直角行星减速机一、直角行星减速机二的一侧均安装有驱动轮,所述直角行星减速机一的另一侧安装有主动链轮一,所述直角行星减速机二的另一侧安装有主动链轮二。
3、优选的,所述底盘框架底端的两端分别安装有轨道主动轴一和轨道主动轴二,且轨道主动轴一和轨道主动轴二的两侧分别安装有轨道轮一和轨道轮二。
4、优选的,所述轨道主动轴一和轨道主动轴二上分别安装有从动链轮一和从动链轮二,所述从动链轮一、从动链轮二均通过链条分别与主动链轮一、主动链轮二形成连接。
5、优选的,所述轨道轮一和轨道轮二的底端与钢管轨道形成活动连接,所述轨道轮一和轨道轮二的底端高于驱动轮的底端。
6、优选的,所述底盘框架顶端的边缘处安装有安装架,所述安装架顶端的两侧均安装有固定架,且固定架的上安装有光电传感器。
7、优选的,所述安装架的外侧壁上安装有控制箱,所述光电传感器、伺服电机一和伺服电机二均通过导线与控制箱形成电性连接。
8、优选的,所述底盘框架两侧的底端均设置有万向轮,且万向轮通过支撑架与底盘框架形成固定连接。
9、优选的,所述万向轮设置有四组,且万向轮在底盘框架的两侧呈中心对称分布。
10、与现有技术相比,本实用新型的有益效果是:
11、(1)通过设置有伺服电机、直角行星减速机、驱动轮、主动链轮、从动链轮、轨道主动轴以及轨道轮,实现了温室物料自动化搬运,轨道行走机构和地面行走机构相结合的方式,伺服电机一和伺服电机二的运作,会带动驱动轮进行转动,实现地面行走,且主动链轮一、主动链轮二与从动链轮一、从动链轮二的联动,会驱动轨道主动轴一、轨道主动轴二控制轨道轮一、轨道轮二转动,在钢管轨道进行移动,实现轨道行走,从而在轨道和地面间行走自由快速切换,提高了作业效率,降低了作业强度,满足大型温室的采摘、运输要求;
12、(2)通过设置有安装架、光电传感器、控制箱以及固定架,实现了防碰撞效果,光电传感器的运作,会对两侧的距离进行实时监测,并将数据转换为电信号发送给控制箱,控制箱会根据系统程序下发指令,控制伺服电机一、伺服电机二的运作状态,能够实时监测环境并做出适应的运动调整,从而确保平稳运行和避免碰撞;
13、(3)通过采用万向轮辅助轨道换行,弥补了轨道行走机构转弯能力有限的缺点;其以温室作物行间灌溉水管和暖气管道作为承载轨道,实现对设施农业生产物料和设备运输的搭载,以减轻人工搬运劳动强度,提高作业效率,并且轨道agv小车底盘具有良好的稳定性、可靠性,其行走速度稳定、调节精度高,便于操作维护,使用方便。
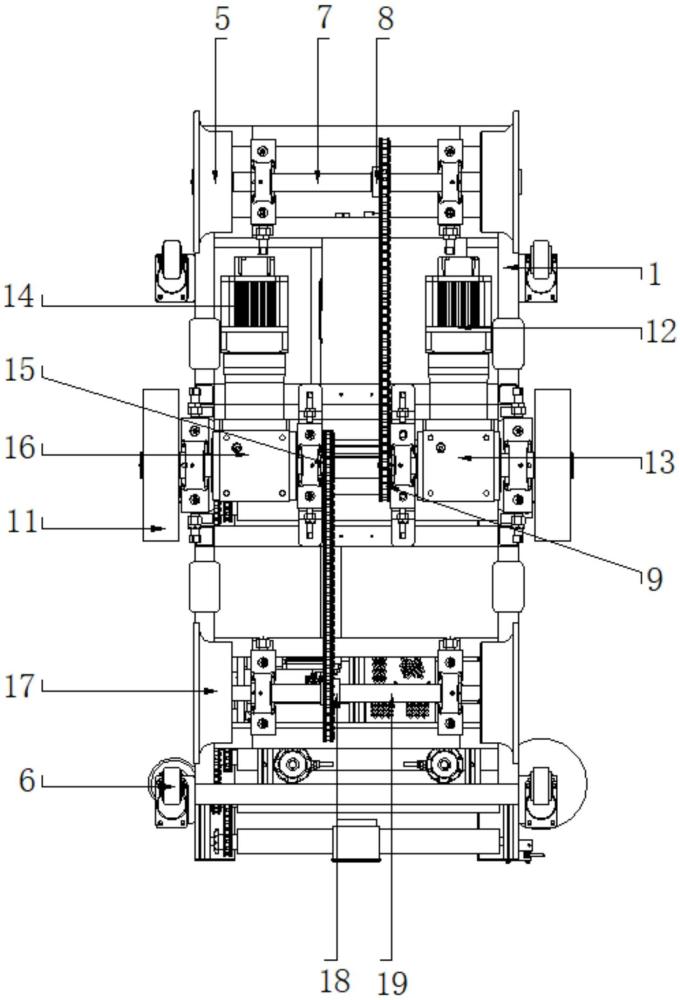
技术特征:1.一种轨道agv小车底盘,包括底盘框架(1),其特征在于:所述底盘框架(1)的底端安装有伺服电机一(12)和伺服电机二(14),所述伺服电机一(12)的一侧安装有直角行星减速机一(13),所述伺服电机二(14)的一侧安装有直角行星减速机二(16),所述直角行星减速机一(13)、直角行星减速机二(16)的一侧均安装有驱动轮(11),所述直角行星减速机一(13)的另一侧安装有主动链轮一(9),所述直角行星减速机二(16)的另一侧安装有主动链轮二(15)。
2.根据权利要求1所述的一种轨道agv小车底盘,其特征在于:所述底盘框架(1)底端的两端分别安装有轨道主动轴一(7)和轨道主动轴二(19),且轨道主动轴一(7)和轨道主动轴二(19)的两侧分别安装有轨道轮一(5)和轨道轮二(17)。
3.根据权利要求2所述的一种轨道agv小车底盘,其特征在于:所述轨道主动轴一(7)和轨道主动轴二(19)上分别安装有从动链轮一(8)和从动链轮二(18),所述从动链轮一(8)、从动链轮二(18)均通过链条分别与主动链轮一(9)、主动链轮二(15)形成连接。
4.根据权利要求2所述的一种轨道agv小车底盘,其特征在于:所述轨道轮一(5)和轨道轮二(17)的底端与钢管轨道(10)形成活动连接,所述轨道轮一(5)和轨道轮二(17)的底端高于驱动轮(11)的底端。
5.根据权利要求1所述的一种轨道agv小车底盘,其特征在于:所述底盘框架(1)顶端的边缘处安装有安装架(2),所述安装架(2)顶端的两侧均安装有固定架(21),且固定架(21)的上安装有光电传感器(3)。
6.根据权利要求5所述的一种轨道agv小车底盘,其特征在于:所述安装架(2)的外侧壁上安装有控制箱(4),所述光电传感器(3)、伺服电机一(12)和伺服电机二(14)均通过导线与控制箱(4)形成电性连接。
7.根据权利要求1所述的一种轨道agv小车底盘,其特征在于:所述底盘框架(1)两侧的底端均设置有万向轮(6),且万向轮(6)通过支撑架(20)与底盘框架(1)形成固定连接。
8.根据权利要求7所述的一种轨道agv小车底盘,其特征在于:所述万向轮(6)设置有四组,且万向轮(6)在底盘框架(1)的两侧呈中心对称分布。
技术总结本技术公开了一种轨道AGV小车底盘,包括底盘框架,所述底盘框架的底端安装有伺服电机一和伺服电机二。本技术通过设置有伺服电机、直角行星减速机、驱动轮、主动链轮、从动链轮、轨道主动轴以及轨道轮,实现了温室物料自动化搬运,轨道行走机构和地面行走机构相结合的方式,伺服电机一和伺服电机二的运作,会带动驱动轮进行转动,实现地面行走,且主动链轮一、主动链轮二与从动链轮一、从动链轮二的联动,会驱动轨道主动轴一、轨道主动轴二控制轨道轮一、轨道轮二转动,在钢管轨道进行移动,实现轨道行走,从而在轨道和地面间行走自由快速切换,提高了作业效率,降低了作业强度,满足大型温室的采摘、运输要求。技术研发人员:闫荣策,刘奇鹏,臧高强受保护的技术使用者:牧星智能工业科技(上海)有限公司技术研发日:20230921技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240718/233749.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表