一种轨道障碍物探测系统及方法与流程
- 国知局
- 2024-08-01 08:53:54
本申请涉及轨道交通安全,特别是涉及一种轨道障碍物探测系统及方法。
背景技术:
1、随着列车行驶速度以及铁路线路里程的不断提高,对列车的行驶安全问题提出了严格要求。其中,列车行驶轨道中随机出现的障碍物对列车安全运行影响最为严重。因此,对列车轨道障碍物的智能检测与识别一直是研究人员的研究重点。
2、目前,轨道障碍物检测方法主要有接触式检测方法和非接触式检测方法。其中,非接触式检测方法相比于接触式检测方法,具有安装步骤简单,工程量小以及成本低的优势,适合大规模投入使用。但是当前非接触式检测方法的应用仅限于光照良好的条件下,在弱光条件下难以实现较远距离的障碍物探测,这不利于列车的安全行驶。
3、鉴于上述问题,如何解决当前在弱光条件下难以实现较远距离的列车轨道障碍物探测,是该领域技术人员亟待解决的问题。
技术实现思路
1、本申请的目的是提供一种轨道障碍物探测系统及方法,以解决当前在弱光条件下难以实现较远距离的列车轨道障碍物探测的问题。
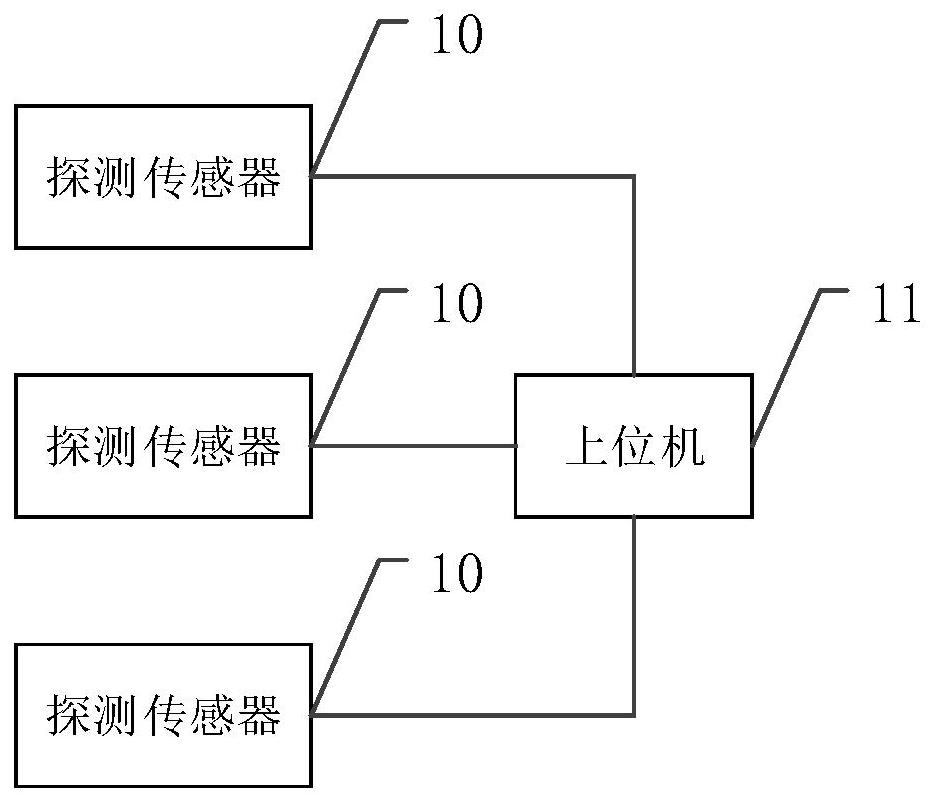
2、为解决上述技术问题,本申请提供一种轨道障碍物探测系统,包括:多个探测传感器和上位机;其中,所述探测传感器至少包含红外传感器、可见光传感器和固态激光雷达;
3、各所述探测传感器均设置于列车头部,并与所述上位机连接,用于同时采集被测铁路轨道的图像信息、接触网的图像信息以及列车行进方向周围的图像信息,并将采集的各所述图像信息传输至上位机;
4、所述上位机用于对各所述图像信息进行处理,并根据处理后的所述图像信息识别所述图像信息中的障碍物。
5、一方面,所述红外传感器包括红外长焦传感器和红外短焦传感器;
6、所述红外长焦传感器和所述红外短焦传感器均设置于所述列车的司机室上方;
7、其中,所述红外长焦传感器的焦距范围为40mm至200mm;所述红外短焦传感器的焦距范围为6mm至40mm。
8、另一方面,所述可见光传感器为可变焦距可见光传感器;
9、所述可变焦距可见光传感器设置于所述列车的司机室上方;
10、其中,所述可变焦距可见光传感器的焦距范围为8mm至320mm。
11、另一方面,所述固态激光雷达设置于所述列车的司机室上方;
12、其中,所述固态激光雷达的帧频不小于10fps。
13、另一方面,所述探测传感器还包括:毫米波雷达;
14、所述毫米波雷达设置于所述列车的司机室下方的车体底部;
15、其中,所述毫米波雷达的帧频不小于10fps。
16、另一方面,所述探测传感器还包括:补盲激光雷达、补盲可见光传感器和补盲红外传感器;
17、所述补盲激光雷达、所述补盲可见光传感器和所述补盲红外传感器均设置于所述列车的司机室上方;
18、其中,所述补盲激光雷达的探测距离小于所述固态激光雷达的探测距离;所述补盲可见光传感器的探测距离小于所述可见光传感器的探测距离;所述补盲红外传感器的探测距离小于所述固态激光雷达的探测距离。
19、另一方面,还包括:报警装置和显示屏;
20、所述报警装置与所述上位机连接,且设置于所述列车的司机室内,用于当所述上位机检测到所述障碍物时,输出告警信息;
21、所述显示屏与所述上位机连接,且设置于所述列车的司机室内,用于当所述上位机检测到所述障碍物时,显示所述障碍物的相关数据;其中,所述相关数据至少包括所述障碍物的类型、位置以及尺寸大小。
22、为解决上述技术问题,本申请还提供一种轨道障碍物探测方法,应用于包含多个探测传感器和上位机的轨道障碍物探测系统;其中,所述探测传感器至少包含红外传感器、可见光传感器和固态激光雷达;所述方法包括:
23、接收各所述探测传感器传输的图像信息;其中,所述图像信息是由各所述探测传感器采集的被测铁路轨道、接触网以及列车行进方向周围的图像信息;
24、对各所述图像信息进行处理;
25、根据处理后的所述图像信息识别所述图像信息中的障碍物。
26、一方面,所述对各所述图像信息进行处理包括:
27、将各所述图像信息进行时间戳拼接,以对各所述图像信息进行帧内同步;
28、分别对各所述图像信息进行图像去噪处理、图像增强处理和图像裁剪处理,以对各所述图像信息进行预处理;
29、获取不同类型的所述探测传感器采集的预处理后的所述图像信息;
30、将不同类型的所述探测传感器采集的预处理后的所述图像信息进行融合数据增强,以得到融合图像信息。
31、另一方面,所述根据处理后的所述图像信息识别所述图像信息中的障碍物包括:
32、通过yolov5算法将所述融合图像信息分割为多个网格,以得到多个网格图像信息;
33、分别判断各所述网格图像信息中是否包含所述障碍物;
34、若是,则获取所述障碍物的位置和尺寸大小;
35、根据所述障碍物的所述位置和所述尺寸大小,利用终身学习算法对所述障碍物进行类型识别,以得到所述障碍物的类型。
36、本申请所提供的轨道障碍物探测系统,包括多个探测传感器和上位机;其中,探测传感器至少包含红外传感器、可见光传感器和固态激光雷达;各探测传感器均设置于列车头部,并与上位机连接,用于同时采集被测铁路轨道的图像信息、接触网的图像信息以及列车行进方向周围的图像信息,并将采集的各图像信息传输至上位机;上位机用于对各图像信息进行处理,并根据处理后的图像信息识别图像信息中的障碍物。由此可知,上述方案在列车头部设置探测传感器,能够采集列车轨道及其附近的图像信息,并传输至上位机进行分析处理,从而识别出图像中的障碍物,实现了非接触式的轨道障碍物检测。由于探测传感器至少包含红外传感器,因此基于红外传感器的工作原理,使得系统能够在雨天、夜晚及其他弱光条件下具有较好的探测能力,从而解决了当前在弱光条件下难以实现较远距离的轨道障碍物探测的问题,大大提高了检测精度和检测效率。
37、此外,本申请还提供了一种轨道障碍物探测方法,效果同上。
技术特征:1.一种轨道障碍物探测系统,其特征在于,包括:多个探测传感器(10)和上位机(11);其中,所述探测传感器(10)至少包含红外传感器(101)、可见光传感器(102)和固态激光雷达(103);
2.根据权利要求1所述的轨道障碍物探测系统,其特征在于,所述红外传感器(101)包括红外长焦传感器和红外短焦传感器;
3.根据权利要求1所述的轨道障碍物探测系统,其特征在于,所述可见光传感器(102)为可变焦距可见光传感器;
4.根据权利要求1所述的轨道障碍物探测系统,其特征在于,所述固态激光雷达(103)设置于所述列车的司机室上方;
5.根据权利要求1所述的轨道障碍物探测系统,其特征在于,所述探测传感器(10)还包括:毫米波雷达(104);
6.根据权利要求1所述的轨道障碍物探测系统,其特征在于,所述探测传感器(10)还包括:补盲激光雷达(105)、补盲可见光传感器(106)和补盲红外传感器(107);
7.根据权利要求1至6任意一项所述的轨道障碍物探测系统,其特征在于,还包括:报警装置(12)和显示屏(13);
8.一种轨道障碍物探测方法,其特征在于,应用于包含多个探测传感器和上位机的轨道障碍物探测系统;其中,所述探测传感器至少包含红外传感器、可见光传感器和固态激光雷达;所述方法包括:
9.根据权利要求8所述的轨道障碍物探测方法,其特征在于,所述对各所述图像信息进行处理包括:
10.根据权利要求9所述的轨道障碍物探测方法,其特征在于,所述根据处理后的所述图像信息识别所述图像信息中的障碍物包括:
技术总结本申请公开了一种轨道障碍物探测系统及方法,涉及轨道交通安全技术领域。系统通过在列车头部设置探测传感器,能够采集列车轨道及其附近的图像信息,并传输至上位机进行分析处理,从而识别出图像中的障碍物,实现了非接触式的轨道障碍物检测。由于探测传感器至少包含红外传感器,因此基于红外传感器的工作原理,使得系统能够在雨天、夜晚及其他弱光条件下具有较好的探测能力,从而解决了当前在弱光条件下难以实现较远距离的轨道障碍物探测的问题,大大提高了检测精度和检测效率。技术研发人员:王宇,李旺,金淼鑫,卫亮,黄远驹,陈晶晶,蒋忠城受保护的技术使用者:中车株洲电力机车有限公司技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240718/233910.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表