一种轨道车辆运行姿态检测方法及检测系统
- 国知局
- 2024-08-01 09:03:53
本发明属于轨道车辆姿态检测领域,尤其涉及一种轨道车辆运行姿态检测方法及检测系统。
背景技术:
1、随着我国轨道车辆事业的不断发展,特别是近些年来轨道运输不断往更智能化、高速化发展,轨道运输的安全、稳定、舒适性越来越受到人们的关注。对于货运列车尤其是超限货物列车,车体的运行姿态关系着货物能否安全到达目的地,是否会对线路的其他列车的安全性产生影响;而对于客运列车来说,车体的运行姿态不仅会影响乘客的乘车舒适度,还与乘客的生命安全密切相关。因此,轨道车辆运行姿态检测装置就显得尤为重要。
2、过大的姿态角和横向、垂向偏移量对于轨道车辆来说都是很大的安全隐患,尤其是在大风等恶劣的天气环境下,在列车运行的全过程对姿态参数进行实时的监测就显得尤为重要。目前,国内外的轨道车辆运行姿态检测方法主要可以分为两类:一是在隧道、横风区等危险路段的地面安装检测装置进行姿态检测,二是通过在车体上安装检测装置实现车载式的检测,不过大部分车载式视觉检测装置需要利用多个已知厚度的标定块对每个测点进行标定,标定时需要不断的叠加标定块,且标定很容易出错,完成标定需要花费大量的时间,难以大规模应用。因此,亟需一种车载式轨道车辆运行姿态检测方法及检测系统,能够免标定,实现对轨道车辆全过程运行姿态的实时监测。
技术实现思路
1、本发明的目的是提供一种轨道车辆运行姿态检测方法及检测系统,能够免标定,解决了现有检测方法由于标定难度大,无法大规模应用的问题,可实现对轨道车辆全过程运行姿态的实时监测。
2、本发明的技术方案详细如下:
3、第一方面,一种轨道车辆运行姿态检测方法,包括以下步骤:
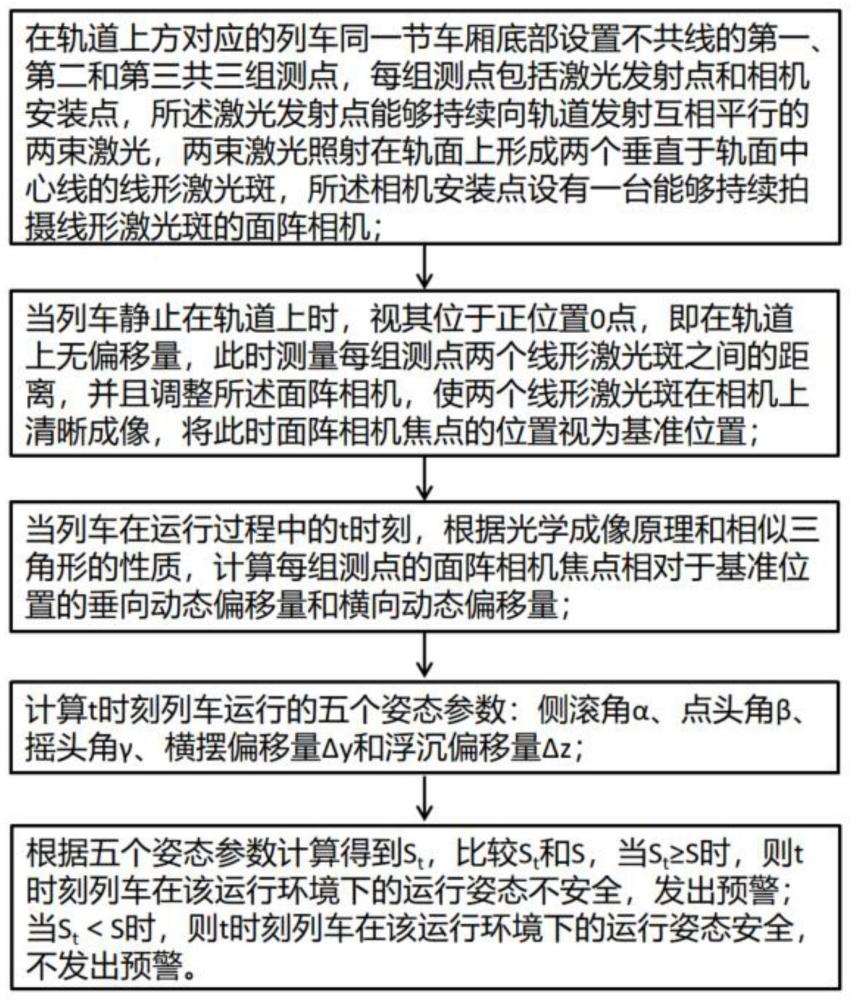
4、s1、在轨道上方对应的列车同一节车厢底部设置第一、第二和第三共三个检测组,每个检测组包括激光发射点和相机安装点,所述激光发射点能够持续向轨道发射互相平行的两束激光,两束激光照射在轨面上形成两个垂直于轨面中心线的线形激光斑,所述相机安装点设有一台能够清晰拍摄线形激光斑的面阵相机,所述面阵相机采用定焦镜头,所述面阵相机的像平面均与轨平面平行,且三个检测组的面阵相机的焦点不在一条直线上;
5、s2、当列车静止在轨道上时,视其位于正位置0点,即在轨道上无偏移量,此时测量每组测点两个线形激光斑之间的距离,并将此时面阵相机焦点的位置视为基准位置;
6、s3、当列车在运行过程中的t时刻,根据光学成像原理和相似三角形的性质,计算每组测点的面阵相机焦点相对于基准位置的垂向动态偏移量δz和横向动态偏移量δy;
7、s4、计算t时刻列车运行的五个姿态参数:侧滚角α、点头角β、摇头角γ、横摆偏移量δy和浮沉偏移量δz;
8、s5、当前运行环境下的实时权重风险系数为st,当前运行环境下线路预先规定的风险系数为s,根据五个姿态参数计算得到st,比较st和s,当st≥s时,则t时刻列车在该运行环境下的运行姿态不安全,发出预警;当st<s时,则t时刻列车在该运行环境下的运行姿态安全,不发出预警。
9、有益效果:
10、己有的车载式视觉车辆运行姿态检测方案在检测装置安装完毕之后,需要用多块己知厚度的标定块不断叠加改变厚度来进行标定,标定时容易出错,且当轮对或者转向架发生更换时,又需要进行重新标定,浪费大量的时间和人力成本。本发明利用两条平行激光束在轨道上的线形激光斑之间距离不变的特点和相似三角形的性质,把标定的过程转换为只需要测量两道激光斑间的距离并输入系统就可以得到检测结果,达到了免标定的效果。
11、进一步的,所述步骤s1中,所述三个检测组的相机安装点所在的平面与轨平面平行。本发明在应用时,需要测量面阵相机焦点之间的横向距离w和纵向距离l,为简化测量过程,可以近似的取两相机安装点之间的横向距离和纵向距离,即两相机安装点连线在车体横向对称面上投影线段的长度、和两相机安装点连线在车体纵向对称面上投影线段的长度。通过测量两相机安装点连线的长度、及相对于车体横向对称面和车体纵向对称面的角度偏差,可以计算出面阵相机焦点之间的横向距离w和纵向距离l,但测量角度的过程容易出现误差,为使测量更简单可靠,本发明采用了优化办法。参见图1,当使三个检测组的相机安装点所在的平面与轨平面平行时,第一检测组的相机安装点100和第二检测组的相机安装点200之间的横向距离,及第一检测组的相机安装点100和第三检测组的相机安装点300之间的纵向距离,都可简单的通过向第一检测组的相机安装点100所在轨道中心线的平行线做垂线来求得。
12、进一步的,所述步骤s1中,所述第一、第二检测组的相机安装点设在车厢的同一头,其所在直线与轨道中心线垂直;第一、第三检测组的相机安装点设在所述车厢的同一侧,其所在直线与轨道中心线平行。参见图2,通过进一步限定相机安装点的位置关系,使得第一检测组的相机安装点100和第二检测组的相机安装点200之间的横向距离就等于其之间的连线,第一检测组的相机安装点100和第三检测组的相机安装点300之间的纵向距离也等于其之间的连线,使得测量更加简单可靠。
13、进一步的,在所述步骤s3中,计算垂向动态偏移量δz的步骤包括:
14、建立随列车一起向前运行的轨面随行坐标系,即以车体几何中心点在轨平面上的投影为原点o,以沿列车运行方向轨面中心线为x轴正方向,垂直于轨面向上为z轴的正方向,y轴垂直于oxz平面向右;
15、计算t时刻第一检测组面阵相机焦点的垂向动态偏移量δz1,a、b是第一检测组的两个线形激光斑;a、b分别是这两个线形激光斑在oxz平面上的投影,它们之间的距离用lab表示,lab等于距离平行的线形激光斑a、b之间的距离;点c、d是a、b两点在相机像平面上对应的成像点,它们之间的距离用ldc表示;f是面阵相机的焦点,mf和fh分别是从点f到线ab和cd的垂线段,lmf是相机的焦距f,lfh是面阵相机焦点到轨面的距离,根据光学成像原理和相似三角形的性质,其中:
16、
17、当列车位于正位置0点时,视垂向偏移量为0,是此时面阵相机焦点到轨面的距离,是此时点c、d之间的距离,有:
18、
19、当列车在运行的过程中t时刻,是此时面阵相机焦点到轨面的距离,是此时点c、d之间的距离,有:
20、
21、第一检测组面阵相机焦点的垂向动态偏移量δz1为:
22、
23、类似计算得到第二和第三检测组面阵相机焦点的垂向动态偏移量δz2和δz3。
24、进一步的,在所述步骤s3中,计算横向动态偏移量δy的步骤包括:
25、计算t时刻第一组测点面阵相机焦点的横向动态偏移量δy1,点a′是轨面中点,点c′是点a′在像平面上的成像点,用lc′c表示点c与点c′的距离,用la′a表示点a′与点a的距离,其中:
26、
27、当列车位于正位置0点时,视横向动态偏移量为0,并以此为t时刻横向动态偏移量的测量标准,为此时点a′与点a的距离,为此时点c与点c′的距离,有:
28、
29、当列车在运行的过程中t时刻,为此时点a′与点a的距离,为此时点c与点c′的距离,有:
30、
31、第一检测组面阵相机焦点的横向动态偏移量δy1为:
32、
33、类似计算得到第二和第三检测组面阵相机焦点的横向动态偏移量δy2和δy3。
34、进一步的,在所述步骤s4中,计算t时刻列车的侧滚角α、点头角β和摇头角γ的步骤包括:
35、w为同一头两检测组的相机安装点之间的横向距离,即面阵相机之间沿y方向的距离,直接测量得到,直接用毫米尺测量得到,侧滚角α为:
36、
37、l为同一侧两检测组的相机安装点之间的纵向距离,即面阵相机之间沿x方向的距离,直接测量得到,直接用毫米尺测量得到,点头角β为:
38、
39、摇头角γ为:
40、
41、进一步的,所述步骤s4中,t时刻列车的横摆偏移量δy和浮沉偏移量δz计算公式为:
42、
43、
44、其中,当i=1时,α前面的符号取“+”,β前面的符号取“+”,γ前面的符号取“+”;
45、当i=2时,α前面的符号取“-”,β前面的符号取“+”,γ前面的符号取“+”;
46、当i=3时,α前面的符号取“+”,β前面的符号取“-”,γ前面的符号取“-”。
47、进一步的,所述步骤s5中,st的计算公式如下:
48、st=p1|α|+p2|β|+p3|γ|+p4|δy|+p5|δz|
49、其中,针对不同的运行环境,对各个姿态参数设定不同的权重,{pi,i∈(1,5)}为五个姿态因素不同的权重参数。
50、第二方面,一种轨道车辆运行姿态检测系统,包括:
51、检测装置,所述检测装置至少有三组,每组检测装置包括激光发射器、棱镜盒和面阵相机,所述激光发射器能够持续向轨道发射互相平行的两束激光,激光照射在轨道上形成线形激光斑,所述面阵相机能够持续拍摄同组检测装置的线形激光斑,并得到清晰的成像后将数据实时发送至计算判断装置;
52、计算判断装置,从所述检测装置的面阵相机获取数据,计算得到t时刻列车的侧滚角α、点头角β、摇头角γ、横摆偏移量δy和浮沉偏移量δz,并判断列车的运行姿态是否安全,向信号输出装置发送信号;
53、信号输出装置,用于接收所述计算判断装置的指令,发出预警信号。
54、进一步的,所述检测装置包括检测盒,所述检测盒包括一个面阵相机、一个激光发射器和一个棱镜盒,所述激光发射器发射的激光通过所述棱镜盒之后,由一道激光变为两道激光平行射出。采用激光发射器和棱镜盒的方式,能够保证两道激光互相平行。
55、下面将参照附图,对本发明作进一步详细的说明。
本文地址:https://www.jishuxx.com/zhuanli/20240718/234671.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表