基于失效系数的列车制动失效检测与停车点预测方法与流程
- 国知局
- 2024-08-02 16:17:37
本发明涉及铁路安全,尤其涉及一种基于失效系数的列车制动失效检测与停车点预测方法。
背景技术:
1、车站进路的控制主要由车站自律机依据调度中心下达的列车运行计划自动生成列车运行指令,通过合法性、时效性、完整性和无冲突性的检查后转变为命令,适时的下达至本车站的联锁设备执行。
2、由于列控系统等级的不同,列车接收进站指令的方式是不同的。当列车采用ctcs-2级控制系统时,车站计算机联锁系统(computer based interlocking,cbi)通过列控中心(train control center,tcc)将列车前方的进路信息发给列车,车载设备根据解析得到的进路信息与应答器上传的线路信息进行结合并计算出常用制动曲线与紧急制动曲线,进而控制列车在安全的限定速度下行驶。当列车采用ctcs-3级控制系统时,调度集中系统(centralized traffic control,ctc)下达命令至无线闭塞系统(radio block center,rbc),无线闭塞系统rbc生成行车许可,再通过通信系统(global system for mobilecommunications-railway,gsm-r)发送到列车,由车载设备计算生成控车曲线。列车进站命令的传递流程如图2所示。图中虚线表示的是ctcs-2级列控系统的信息传递流向,实线表示的是ctcs-3级列控系统的信息传递流向。
3、列车的进站控车曲线可以分为两个部分:顶棚速度监控(ceiling speedmonitor,csm)区和目标速度监控(target speed monitor,tsm)区。csm区的控车曲线根据列车制动性能进行计算;tsm区的控车曲线根据前方目标点和顶棚速度确定。制动曲线的计算应当在车辆额定减速度的基础上,将制动性能下降时的最不利减速度也考虑在内。减速度的取值应考虑不同速度、不同坡度对减速度的影响。当前方目标点为停车点时,列控车载设备将计算并产生常用制动模式曲线和紧急制动模式曲线,如图3所示。图中的制动模式为连续式一次制动速度控制,图中右侧信号机为股道上的出站信号机,进站的列车需要停在其前方。正常情况下,列车实际的运行曲线处于常用制动曲线之下,两条曲线之间会存在一定的速度允许量,通常取值为5km/h。图3中所示进站过程为列车经道岔侧线接车,lb是列车从制动起点到停车点的制动距离;lp是安全距离,是列车运行控制系统考虑系统允许误差而要求设置的保护区段,因此列车停留在安全距离内属于正常状况。
技术实现思路
1、本发明的实施例提供了一种基于失效系数的列车制动失效检测与停车点的预测方法,用于解决现有技术中存在的技术问题。
2、为了实现上述目的,本发明采取了如下技术方案。
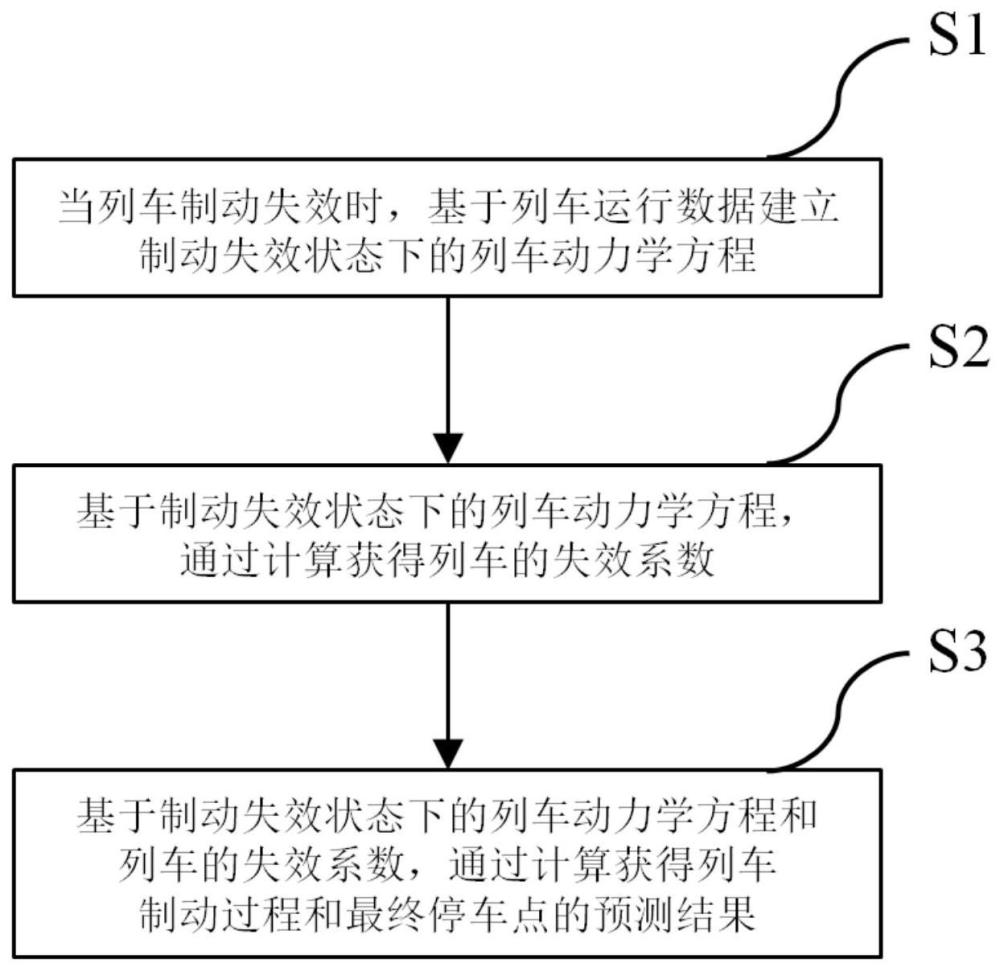
3、基于失效系数的列车制动失效检测与停车点预测方法,包括:
4、s1当列车制动失效时,基于列车运行数据建立制动失效状态下的列车动力学方程;
5、s2基于制动失效状态下的列车动力学方程,通过计算获得列车的失效系数;
6、s3基于制动失效状态下的列车动力学方程和列车的失效系数,通过计算获得列车制动过程和最终停车点的预测结果;
7、步骤s3的执行结果用于输入到铁路列车调度系统,使得铁路列车调度系统能够输出用于目标区段损害管制的安全措施。
8、优选地,列车动力学方程包括:
9、列车动能总和式
10、
11、式中,et为能量总和,单位为kj;mt为列车总质量,单位为kg;v为列车当前速度,单位为m/s;jn为转动惯量;ωn为角速度;n为列车的节数;r为轨道曲线半径,单位为m;
12、通过式
13、
14、并结合牛顿第二定律获得式
15、
16、式中,γ为回转系数;magg为换算总质量;ac为制动减速度,单位为m/s2;f为制动力合力,单位为kn;c为合力的单位制动力,单位为n/kn;g为重力加速度,单位为9.8m/s2;
17、将c转化式
18、
19、式中,b为列车单位制动力,单位为n/kn;wn为列车运行单位阻力,单位为n/kn;i为坡度千分数;
20、通过积分条件获得式
21、
22、通过式(5)获得式
23、
24、式中,△sn+1为两个相邻速度点间的位置间隔,单位为m;sn+1为列车在第n+1点的位置;sn为列车在第n点的位置;vn+1为列车在第n+1点的速度,单位为m/s;vn为列车在第n点的速度,单位为m/s;
25、通过联立式(4)和(6)获得两个相邻速度点间位置间隔的细化公式
26、
27、通过列车减速状态时的速度式v=v0+at以及制动力使用系数获得列车在减速状态时的速度式
28、
29、式中,vn为列车当前速度,m/s;vn+1为下一时刻的速度,m/s;f为制动失效系数;a1为减速度,m/s2;ξx为制动力使用系数,有三个可取数值,分别是:紧急制动力对应的减速度系数ξ1,最大常用制动力对应的减速度系数ξ2,常用制动力对应的减速度系数ξ3;
30、当列车速度发生变化时,列车对应的距离增量式为
31、
32、步骤s2包括:
33、基于速度—时间数据的时间计算法,通过式
34、
35、计算获得第一失效系数ft;
36、基于速度—距离数据的距离计算法,通过式
37、
38、计算获得第二失效系数fs;式(10)和(11)中ξx为制动力使用系数,计算的优先级顺序为ξ1>ξ2>ξ3;
39、通过式
40、
41、降低列车测速测距单元的测量误差影响;
42、通过式
43、er=|(fdetection-freal)/freal| (13)
44、评估第一失效系数和第二失效系数的精度;式中,fdetection为多次计算得到的失效系数的平均值;freal为失效系数的设定值。
45、优选地,步骤s3包括:
46、通过式
47、
48、计算获得列车制动过程和最终停车点的预测结果。
49、由上述本发明的实施例提供的技术方案可以看出,本发明提供一种基于失效系数的列车制动失效检测与停车点的预测方法,包括:当列车制动失效时,基于列车运行数据建立制动失效状态下的列车动力学方程;基于制动失效状态下的列车动力学方程,通过计算获得列车的失效系数;基于制动失效状态下的列车动力学方程和列车的失效系数,通过计算获得列车制动过程和最终停车点的预测结果。本发明提供的方法能够有效的检测制动故障列车的失效系数并预测列车的停车点,为铁路列车调度系统输出安全措施方案提供数据有力支持。
50、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250160.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表