一种可快速拆装的装备辅助自动驾驶装置及方法
- 国知局
- 2024-08-02 16:17:28
本发明涉及一种可快速拆装的装备辅助自动驾驶装置及方法,属于铁路运输。
背景技术:
1、装备远距离运输时,通常采用铁路列车平板装载的方式进行,具有成本低、速度快、安全的优点。但重型装备由于体型庞大,必须实现装备重心与列车平板中心基本重合,并进行钢缆固定,才能在列车快速转弯时不会发生侧翻事故。但在装备装载时,装备车辆通常需要在铁路列车平板上由驾驶员驾驶从第一节行驶到目标为止,而由于铁路列车平板较窄,几乎和装载车辆等宽,列车平板一般处于驾驶员盲区,实现装备重心与列车平板中心距离满足规范要求难度较大(只有3cm左右),通常采用人工辅助引导的方式实现,即使是经验丰富的驾驶员和引导员通常也要用十几分钟才能完成一个大型设备的装载要求。
2、为提高装备列车平板装载效率和自动化水平,中国专利cn204323334u提出一种装甲车辆铁路装载导引系统,该方法通过采用红外深度视觉传感器、超声测距传感器、高清彩色摄像头、全球定位模块等装置实现装载引导,该方法不仅成本高昂,而且全球定位模块和红外深度视觉一般10cm的精度是无法满足装载要求的,同时该专利并未给出有效的提升精度的算法;中国专利202020243620.9提供了基于激光引导定位铁路装载的辅助装置,该方法只能测量出车辆头部与平板中心线之间的距离偏差,而无法获取角度偏差,因此该方法最大的问题是无法保证装备的中线与铁路平板中心重合;中国专利201720304937.7提出了一种基于无线图像数据采集的铁路装载方法,但该方法采用无线方法传递图像信息,具有无法忽略的时间延迟,因此在实时性要求很高的装备装载中导引基本不具备可行性。同时上述装载导引装置都只能到装载导引,需要人工驾驶,均无法做到装备车辆自动或者半自主方向控制。
技术实现思路
1、本发明的目的在于提供一种可快速拆装的装备辅助自动驾驶装置及方法,以解决铁路平板装载依靠纯粹人工,效率低、误差大、难度大、易于发生事故,且无法解决自主或者半自主驾驶的问题。
2、为实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种可快速拆装的装备辅助自动驾驶装置,包括视频传感器、控制器和转向驱动装置,所述视频传感器可拆卸地安装于装载车辆前侧中间位置且视频图像纵向中轴线与装载车辆中线重合,所述转向驱动装置可拆卸地安装在车辆方向盘上;所述视频传感器用于采集铁路列车平板的图像信息,并发送给控制器;所述控制器用于对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号给转动驱动装置;所述转向驱动装置用于根据接收的转向控制角信号,驱动装载车辆方向盘旋转。
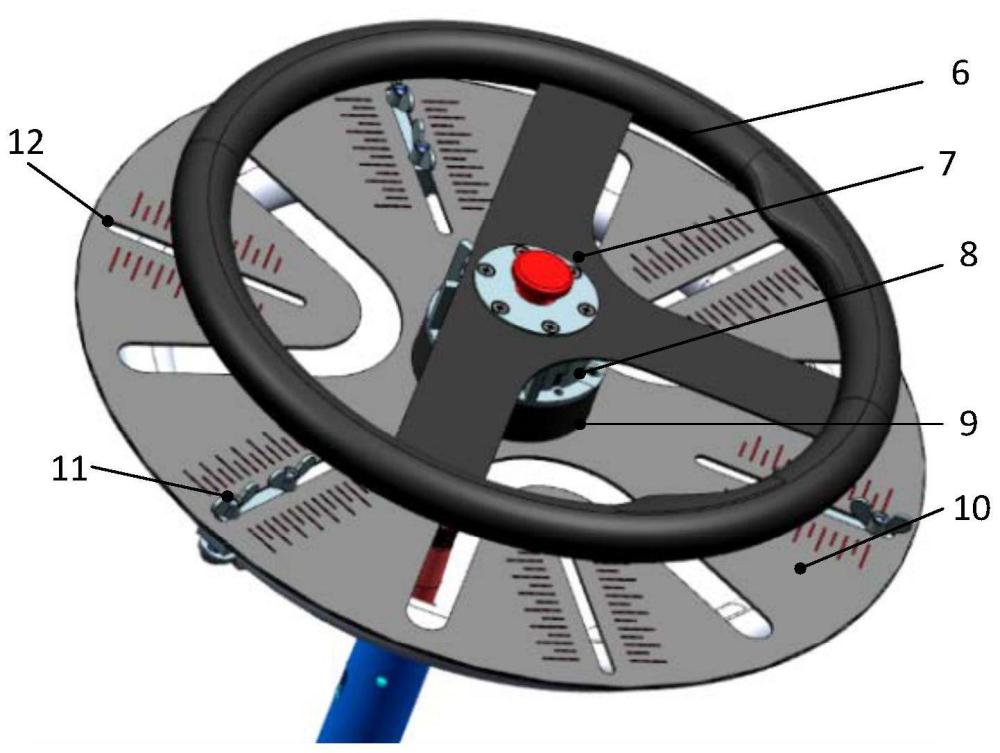
4、进一步地,所述转向驱动装置包括附加方向盘、转接件、转向电机和转接盘,所述附加方向盘通过转接件与转向电机的一端连接,所述转向电机的另一端与转接盘相连接,所述转接盘通过可拆卸方式安装在装载车辆方向盘上,所述转向电机与控制器连接。
5、进一步地,所述转接盘沿圆周方向设置有槽孔,所述转接盘通过卡箍组件与槽孔的相配合连接在装载车辆方向盘上。
6、进一步地,所述槽孔设置有刻度,用于定位卡箍组件,确保转向电机中心位于装载车辆方向盘中心。
7、进一步地,所述转向驱动装置还包括模式切换开关,所述模式切换开关与控制器连接,所述模式转换开关用于对装载车辆在手动/自动两种模式进行切换,手动模式下,由驾驶员通过手动操作附加方向盘带动装载车辆方向盘旋转;自动模式下,由控制器通过转向驱动装置驱动装载车辆方向盘旋转。
8、进一步地,所述的可快速拆装的装备辅助自动驾驶装置,还包括ar眼镜,所述ar眼镜与控制器连接,所述控制器用于将获得的距离偏差和角度偏差发送至ar眼镜,所述ar眼镜将所述距离偏差和角度偏差显示给驾驶员。
9、第二方面,本发明提供了一种装备辅助自动驾驶控制方法,利用第一方面所述的可快速拆装的装备辅助自动驾驶装置实现,所述方法包括:
10、采集铁路列车平板的图像信息;
11、对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号;
12、根据转向控制角信号,驱动装载车辆方向盘转向。
13、进一步地,所述对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号,包括:
14、控制装载车辆以最大方向盘转角θ向铁路列车平板纵向中轴线方向靠近并前进,同时根据接收的图像计算距离偏差和角度偏差;
15、当角度偏差达到车辆最大角度偏差α时,控制装载车辆方向盘转角归零,装载车辆直行向铁路列车平板纵向中轴线靠近,直至距离偏差为y1;
16、控制装载车辆方向盘转角转换为-θ,装载车辆继续向铁路列车平板纵向中轴线靠拢,当到达铁路列车平板纵向中轴线时,角度偏差和距离偏差应同时变为0;
17、控制装载车辆方向盘回正,装载车辆沿铁路列车平板纵向中轴线直行;
18、按照pid控制算法控制装载车辆沿铁路列车平板纵向中轴线前行到达指定位置。
19、进一步地,所述距离偏差y1根据以下方法获得:
20、从铁路列车平板纵向中轴线开始,以角度偏差和距离偏差为0作为初始条件,以装载车辆方向盘转角为-θ倒推,获得最大角度偏差为α时的距离偏差y1。
21、与现有技术相比,本发明的有益技术效果为:
22、本发明不需要对装载车辆进行改装,就可以实现对装载车辆方向盘的方向控制,从而实现对车辆的半自主驾驶,确保车辆快速并高精度地到达指定位置,实现车辆在铁路列车平板上的自动、精确行驶,具有成本低、使用方便、自动化程度高的特点,为提高车辆铁路装载的自动化奠定了基础。
技术特征:1.一种可快速拆装的装备辅助自动驾驶装置,其特征在于,包括视频传感器(1)、控制器(2)和转向驱动装置(4),所述视频传感器(1)可拆卸地安装于装载车辆前侧中间位置且视频图像纵向中轴线与装载车辆中线重合,所述转向驱动装置(4)可拆卸地安装在车辆方向盘上;所述视频传感器(1)用于采集铁路列车平板的图像信息,并发送给控制器(2);所述控制器(2)用于对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号给转动驱动装置(4);所述转向驱动装置(4)用于根据接收的转向控制角信号,驱动装载车辆方向盘旋转。
2.根据权利要求1所述的可快速拆装的装备辅助自动驾驶装置,其特征在于,所述转向驱动装置(4)包括附加方向盘(6)、转接件(8)、转向电机(9)和转接盘(10),所述附加方向盘(6)通过转接件(8)与转向电机(9)的一端连接,所述转向电机(9)的另一端与转接盘(10)相连接,所述转接盘(10)通过可拆卸方式安装在装载车辆方向盘上,所述转向电机(9)与控制器(2)连接。
3.根据权利要求2所述的可快速拆装的装备辅助自动驾驶装置,其特征在于,所述转接盘(10)沿圆周方向设置有槽孔(12),所述转接盘(10)通过卡箍组件(11)与槽孔(12)的相配合连接在装载车辆方向盘上。
4.根据权利要求3所述的可快速拆装的装备辅助自动驾驶装置,其特征在于,所述槽孔(12)设置有刻度,用于定位卡箍组件(11),确保转向电机(9)中心位于装载车辆方向盘中心。
5.根据权利要求2所述的可快速拆装的装备辅助自动驾驶装置,其特征在于,所述转向驱动装置还包括模式切换开关(7),所述模式切换开关(7)与控制器(2)连接,所述模式转换开关(7)用于对装载车辆在手动/自动两种模式进行切换,手动模式下,由驾驶员通过手动操作附加方向盘(6)带动装载车辆方向盘旋转;自动模式下,由控制器(2)通过转向驱动装置(4)驱动装载车辆方向盘旋转。
6.根据权利要求1所述的可快速拆装的装备辅助自动驾驶装置,其特征在于,还包括ar眼镜(5),所述ar眼镜(5)与控制器(2)连接,所述控制器(2)用于将获得的距离偏差和角度偏差发送至ar眼镜(5),所述ar眼镜(5)将所述距离偏差和角度偏差显示给驾驶员。
7.一种装备辅助自动驾驶控制方法,其特征在于,利用权利要求1-6任一项所述的可快速拆装的装备辅助自动驾驶装置实现,所述方法包括:
8.根据权利要求7所述的装备辅助自动驾驶控制方法,其特征在于,所述对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号,包括:
9.根据权利要求8所述的装备辅助自动驾驶控制方法,其特征在于,所述距离偏差y1根据以下方法获得:
技术总结本发明公开了一种可快速拆装的装备辅助自动驾驶装置及方法。所述装置包括视频传感器、控制器和转向驱动装置,视频传感器可拆卸地安装于装载车辆前侧中间位置且视频图像纵向中轴线与装载车辆中线重合,转向驱动装置可拆卸地安装在车辆方向盘上;视频传感器用于采集铁路列车平板的图像信息,并发送给控制器;控制器用于对接收的图像进行识别,获得视频图像纵向中轴线与铁路列车平板纵向中轴线的距离偏差和角度偏差,并根据距离偏差和角度偏差,输出转向控制角信号给转动驱动装置;转向驱动装置用于根据接收的转向控制角信号,驱动装载车辆方向盘旋转。本发明能够实现对车辆的半自主驾驶,确保车辆快速并高精度地到达指定位置。技术研发人员:张海涛,徐其威,郝建新,李建科受保护的技术使用者:中国人民解放军陆军工程大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/250157.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
机车防倾倒机构的制作方法
下一篇
返回列表