一种多轴电力机车牵引力自平衡分配方法
- 国知局
- 2024-08-02 16:20:43
本发明属于机车牵引控制,尤其是涉及多轴电力机车牵引力自平衡分配方法。
背景技术:
1、列车运行通过轮轨间的相互作用来实现,只有在保证轮轨间的有效粘着为前提条件下,才能进一步利用牵引电机的功率。轮轨粘着特性不仅与机车自身和轮轨材料有关,也与线路状况、轨面清洁度等一系列随时空变化的不确定因素相关。若机车运行过程中牵引力大于轮轨间可用粘着力,多余牵引力将加速车轮形成空转,相对滑动速度很快加大,可用粘着力则迅速降低,会造成轮轨的磨损甚至毁坏,不仅增加了铁路运营的保养维修费用,也会威胁到机车的安全运行。由于机车运行的条件干变万化,牵引中,司机操纵的改变或轨面条件的恶化,空转并不能完全避免;目前国内交直机车主要采用组合校正法进行防空转防滑控制,首先对车轮加速度进行判断,当加速度超过一定阈值时表示空转滑行现象比较严重,则快速深度削减动轮驱动转矩,即削减机车牵引力;如果车轮加速度没有超过阈值,则对蠕滑速度进行判断,当蠕滑速度超过阈值时,对驱动转矩进行较大幅度的调整,反之,判定为正常运行状况。在用的组合校正法采用2个或者是多个单项阈值条件判断是否发生空转,在未发生空转时,不能实现空转风险的综合判断;在已经发生空转时,不能实现空转程度的综合判断。当机车牵引前行时,因机车构造本身,或者是路轨坡度等原因造成轴重转移,减载量多的轮对可能首先发生空转,进而导致机车所有轮对空转。
技术实现思路
1、本发明的目的在于,针对现在已有技术的缺陷,提供一种多轴电力机车牵引力自平衡分配方法,依据轴1至轴n的轴间速度差、轮对速度变化率和轮荷重进行轴1至轴n的机车牵引力分配。
2、具体方法是,按照式
3、
4、计算轴j的分配权重值bj;其中,γf为非线性调整系数,γf的取值范围是满足0.85≤γf≤1.5。按照式
5、
6、进行轴1至轴n的机车牵引力分配,其中,fj2为分配给轴j的机车牵引力,pj为轴j的轮荷重,pl为轴l的轮荷重,bl为轴l的分配权重值,f1为机车总牵引力。n为多轴电力机车的轴数,多轴电力机车为能够进行n轴轴控式牵引的电力机车。
7、轴1至轴n分别依据蠕滑度和蠕滑度变化率判断机车轮对是否发生空转,方法是,当轴j的空转风险值ej大于等于1时,则轴j机车轮对发生空转;空转风险值ej按照式
8、
9、进行计算,其中,xj1为轴j的蠕滑度,θ1为蠕滑度阈值;xj2为轴j的蠕滑度变化率,θ2为蠕滑度变化率阈值;γ1、γ2为非线性加权指数因子,且γ1≥1、γ2≥1。
10、当判断轴j发生轮对空转时,通过减小空转牵引力控制比φj来进行轴j机车牵引力减载,实现空转牵引力控制;空转牵引力控制比φj为空转牵引力控制后的轴j机车牵引力与空转牵引力控制前的轴j机车牵引力之间的比值,且有0≤φj≤1。
11、实现空转牵引力控制的过程是:
12、过程i,空转牵引力减小过程;从空转风险值ej大于等于1且持续增大开始,至空转风险值ej从持续增大变为开始减小时结束,轴j空转牵引力控制比φj以减载斜率djd减小;过程i结束时的φj值为最低维持值φjl。
13、过程ii,空转牵引力最低维持值维持过程;从过程i结束开始,空转风险值ej持续减小至小于1时结束,空转牵引力控制模块控制φj等于最低维持值φjl。
14、过程iii,空转牵引力恢复过程;从过程ii结束开始,控制φj以恢复斜率dju增大,至φj增大到等于1时结束。恢复斜率dju的上升速率在0.05/s至0.5/s之间选择。
15、轴j减载斜率djd的大小由轴j蠕滑减载因子ej控制,按照式
16、
17、计算蠕滑减载因子ej,其中,γ0为蠕滑减载控制因子,且1≤γ0≤2;轴j的减载斜率djd按照式
18、
19、进行计算,其中,dh为减载斜率上限值,dl为减载斜率下限值;em为蠕滑减载因子限值,且有
20、对机车牵引力分配之前的机车总牵引力f1进行上限限幅控制,方法是,
21、
22、其中,f是上限限幅之前的机车总牵引力;pz是总轴重,为轴1至轴n的轮荷重之和;μk是计算粘着系数,μk·pz为机车总牵引力限定值。
23、依据式
24、
25、计算得到计算粘着系数μk,其中,v是机车车速,是,a1、a2、a3、a4、a5为计算粘着系数的经验公式参数。
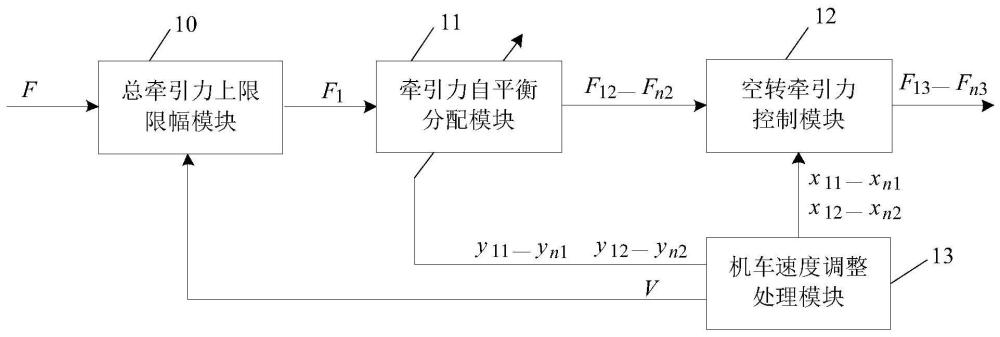
26、所述多轴电力机车牵引力自平衡分配方法由包括牵引力自平衡分配模块的多轴电力机车牵引力平衡控制系统实现,牵引力自平衡分配模块依据轴1至轴n的轴间速度差、轮对速度变化率和轮荷重进行轴1至轴n的机车牵引力分配。
27、所述多轴电力机车牵引力平衡控制系统还包括总牵引力上限限幅模块、空转牵引力控制模块和机车速度调整处理模块。总牵引力上限限幅模块依据粘着系数经验计算模型对机车总牵引力进行上限限幅控制;空转牵引力控制模块中,轴1至轴n分别依据蠕滑度和蠕滑度变化率判断机车轮对是否发生空转,并依照空转判断结果决定是否对机车牵引力进行减载控制。
28、机车速度调整处理模块包括机车车轮旋转速度采集单元、机车雷达速度采集单元、车载卫星定位系统速度采集单元和速度调整计算单元。机车速度调整处理模块采集机车雷达速度、车载卫星定位系统速度和轴1至轴n的机车车轮旋转速度,输出送至总牵引力上限限幅模块的机车车速v,送至牵引力自平衡分配模块的轴间速度差y11至yn1和轮对速度变化率y12至yn2,送至空转牵引力控制模块的蠕滑度变化率x12至xn2和蠕滑度x11至xn1。
29、机车速度调整处理模块周期性地采集机车雷达速度w(h)和轴1至轴n的机车车轮旋转速度v1(h)至vn(h),周期时间为tv。机车速度调整处理模块周期性地采集车载卫星定位系统速度u(k)、车载卫星定位状态信息x(k),读取同步采集时间点采集的机车车轮旋转速度vj(k)、轴1至轴n的机车车轮旋转速度v1(k)至vn(k)并进行迭代计算,周期时间为tu,k为当前迭代计算代次;tu大于tv。
30、第k次迭代计算时,判断采集的车载卫星定位系统速度u(k)是否有效并统计连续有效次数值;判断是否能够进行速度调整模型参数的卫星速度同步整定。判断为能够进行速度调整模型参数的卫星速度同步整定时,按照式
31、
32、整定当前雷达速度调整系数pw(k)和当前轴1至轴n的轮/车速度比系数pj(k);i分别等于1、2、3、…、m时,u(k-1)、u(k-2)、u(k-3)、…、u(k-m)分别为机车速度调整处理模块前m次迭代计算时读取的车载卫星定位系统速度,vj(k-1)、vj(k-2)、vj(k-3)、…、vj(k-m)分别为前m次迭代计算时读取的同步采集时间点采集的轴j的机车车轮旋转速度,pw(k-1)、pw(k-2)、pw(k-3)、…、pw(k-m)分别为前m次迭代计算时得到的雷达速度调整系数,pj(k-1)、pj(k-2)、pj(k-3)、…、pj(k-m)分别为前m次迭代计算时得到的轴j的轮/车速度比系数,w(k-1)、w(k-2)、w(k-3)、…、w(k-m)分别为前m次迭代计算时读取的机车雷达速度;按照式
33、
34、计算当前的雷达同步调整速度w*(k)。
35、判断为不能够进行速度调整模型参数的卫星速度同步整定时,对m0个点(k-1,pw(k-1))、(k-2,pw(k-2))、…、(k-m0,pw(k-m0))进行直线拟合得到雷达速度调整一阶拟合直线,取雷达速度调整一阶拟合直线上点(k,pw*(k))上的值pw*(k)为当前雷达速度调整系数pw(k)。i分别等于1、2、3、…、m0时,pw(k-1)、pw(k-2)、pw(k-3)、…、pw(k-m0),分别为前m0次迭代计算时得到的雷达速度调整系数;按照式
36、
37、计算当前的雷达同步调整速度w*(k);根据w*(k),按照式
38、
39、整定当前轴1至轴n的轮/车速度比系数pj(k);i分别等于1、2、3、…、m0-1时,w*(k-1)、w*(k-2)、w*(k-3)、…、w*(k-m0+1),分别为前m0-1次迭代计算时得到的雷达同步调整速度,pj(k-1)、pj(k-2)、pj(k-3)、…、pj(k-m0+1)分别为前m0-1次迭代计算时得到的轴j的轮/车速度比系数,vj(k-1)、vj(k-2)、vj(k-3)、…、vj(k-m0+1)分别为前m0-1次迭代计算时读取的同步采集时间点采集的轴j的机车车轮旋转速度。
40、判断是否能够进行速度调整模型参数的卫星速度同步整定的方法是,定位状态信息x(k)中包括有定位状态是有效定位,还是无效定位的信息;当定位状态信息x(k)和x(k-1)中的定位状态均为有效定位时,则判断为能够进行速度调整模型参数的卫星速度同步整定,否则,判断为不能够进行速度调整模型参数的卫星速度同步整定。x(k-1)是前一次迭代计算时读取的车载卫星定位系统数据。m的值与迭代计算过程中,判断车载卫星定位系统速度u(k)是否有效并统计连续有效次数值相关,具体是,m等于连续有效次数值减1且小于等于m0-1,m0为大于等于3的整数。
41、当前机车速度vc(h)按照式
42、
43、进行计算,计算周期和采样周期tv相同。取机车车速v为当前机车速度vc(h)。
44、按照式
45、
46、进行计算,计算周期和采样周期tu相同。
47、轴j的蠕滑度变化率xj2按照式
48、
49、进行计算,计算周期和采样周期tu相同。uj(k-1)为前一次按照机车速度调整方法迭代计算所得到的轴j的轮/车速度比系数。
50、轴j的轴间速度差yj1按照
51、yj1=vj(h)-v0(h)
52、进行计算,计算周期和采样周期tv相同。v0(h)为轴1至轴n的机车车轮旋转速度v1(h)至vn(h)中的最小值。
53、轴j的机车轮对速度变化率yj2按照式
54、
55、进行计算,计算周期和采样周期tv相同。xj1(h-1)为前一次以采样周期tv采样得到的轴j的机车车轮旋转速度。
56、车载卫星定位系统速度u(k)采样时刻之前的第τ个机车车轮旋转速度采集时刻为u(k)同步采集时间点,τ是延滞间隔周期数,在该点采集的轴j的机车车轮旋转速度为vj(k)。同样地,车载卫星定位系统速度u(k)采样时刻之前的第τ个机车雷达速度采集时刻为u(k)同步采集时间点,机车雷达速度w(k)和机车车轮旋转速度v(k)的同步采集时间点一致。延滞间隔周期数τ是将车载卫星定位系统速度获得时刻滞后于机车车轮旋转速度和机车雷达速度的获得时刻的时间滞后值转换成为的采集周期tv倍数值。当车载卫星定位系统速度u(k)无效时,其采样时刻仍然存在,即u(k)同步采集时间点仍然存在。当满足
57、的关系且最近连续的m1次判断车载卫星定位系统速度均为有效时,进行延滞间隔周期数τ的计算,m1≥10;ε为大于0的加速度变化阈值,具体来说,ε的数值可以在至的数值范围内选择,为机车的启动平均加速度。上式中,β(k)即为i等于0时的β(k-i),为计算的最近一次机车加速度变化率;i分别等于1,2,......,m1-1时的β(k-i)为最近的m1-1次机车加速度变化率。
58、机车加速度变化率按照式
59、
60、进行计算;其中,α(k)为最近一次采集的机车加速度,α(k-1)为前一次采集的机车加速度。
61、机车加速度由加速度计测量采集。或者是,机车加速度按照式
62、
63、进行计算;其中,u(k-1)为采集u(k)的前一次采集的车载卫星定位系统速度。
64、计算延滞间隔周期数τ的方法是,设待优化的参数为延滞间隔周期数为τ*和雷达速度比例系数pw*。延滞间隔周期数为τ*时,与u(k-i)相对应的同步采集时间点采集的机车车轮旋转速度为vj*(k-i),与u(k-i)相对应的同步采集时间点采集的机车雷达速度为w*(k-i),即与u(k)相对应的同步采集时间点采集的机车车轮旋转速度、机车雷达速度分别为vj*(k)、w*(k-i),与u(k-1)相对应的同步采集时间点采集的机车车轮旋转速度、机车雷达速度分别为vj*(k-1)、w*(k-1),与u(k-2)相对应的同步采集时间点采集的机车车轮旋转速度、机车雷达速度分别为vj*(k-2)、w*(k-2),以此类推。最小值优化目标函数是
65、
66、取满足最优值(即q为最小值)q的延滞间隔周期数τ*为延滞间隔周期数τ;τ*的取值范围是大于0且小于2/tv的整数,pw*取值范围是大于等于0.8且小于等于1.2。
67、所述机车速度调整处理模块中,对采样得到的机车车轮旋转速度滤波后得到采集的机车车轮旋转速度;对采样得到的机车雷达速度滤波后得到采集的机车雷达速度;对采样得到的车载卫星定位系统速度滤波后得到采集的车载卫星定位系统速度。在采集第一次车载卫星定位系统速度之前,令
68、
69、其中,i=1,2,......,m-1;j=1,2,......,n。
70、本发明的有益效果是:当轴重转移使减载量大的轮对有空转趋势时,轴间速度差、轮对速度变化率将变大;本发明不具体分析计算轴重转移量的大小,依据各轴的轴间速度差和轮对速度变化率来进行牵引力分配,轴间速度差和轮对速度变化率线性叠加值小则牵引力分配比例大,反之则牵引力分配比例小;不同轴间速度差、轮对速度变化率对牵引力分配比例的影响为非线性,线性叠加值较小时其变化对牵引力分配比例的影响小,即在空转风险低时尽量依据轮荷重平均分配各轴的牵引力,或者是与其他轴间速度差和轮对速度变化率小的轮轴平均承担空转高风险轮轴所减载的机车牵引力;在其他轴间速度差和轮对速度变化率较大,特别是线性叠加值处于空转风险阈值附近时,线性叠加值的变化对牵引力分配比例的影响大,即对空转风险高的轮轴则较大幅度减小牵引力的分配,使牵引力分配阶段在维持总机车牵引力不变的前提下,尽量避免轮轴发生空转。依据轴间速度差、轮对速度变化率分配牵引力的非线性影响因素大小和相互影响力大小能够通过设置的参数进行改变,以适应不同场合,达到最佳效果;轴间速度差为不同轮对之间的速度绝对值之差,反映的是比最小轮对速度快的程度;轮对速度变化率是轮对本身速度增加的快速程度,两者综合,能够尽快找出首先发生空转的轮对,并进行牵引力分配的减载。当在依据轴间速度差和轮对速度变化率进行牵引力分配仍然没有避免轮对空转,例如,限制幅度后的总牵引力仍然超过总轮轨粘着力,即不管如何分配牵引力,限制幅度后各轴牵引力之和(轮周切线力之和)仍然超过轮轨粘着力之和,均不能避免部分轮对或者所有轮对发生空转的情况;此时,判断出某轴轮对发生空转后,该轴牵引力减载的速率则由本轴的蠕滑度大小进行非线性控制,当该轴的蠕滑度大时,意味着空转严重,因此减载速率大,以便迅速消弭空转因素;蠕滑度小时,意味着空转较轻,进行减载但减载速率小。蠕滑度采用非线性方式控制牵引力减载速率,使在蠕滑度阈值附近的控制灵敏度高,能够提高空转轮对的控制效果,从而提高整体空转控制效果。依据蠕滑度控制牵引力减载速率的非线性影响因素大小能够通过设置的参数进行改变,以适应不同场合,达到最佳效果。本发明采用非线性数学模型计算空转风险值来进行各轮轴的空转判断,将传统轮对空转的多个单项阈值判断条件与单项阈值条件均不满足的情况下的加权判断条件综合为一个整体,简化了判断依据,也在单项阈值条件均不满足的情况下,将多个因素量化后进行加权计算,实现多因素的综合判断,使空转判断更为全面准确。非线性数学模型的选取,能够尽量避免单项阈值条件均不满足的情况下加权判断条件的误判可能性。同时,加权判断条件的作用大小可以通过参数来进行设置与调节,各加权项的相对作用大小也可以通过参数来进行设置与调节,使该非线性数学模型归一化的机车轮对空转判断方法能够适用于不同的机车类型与运行状况。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250335.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表