机动车未来行驶轨迹预测方法、装置及无人驾驶设备与流程
- 国知局
- 2024-08-02 16:24:12
本发明涉及无人驾驶,具体是一种机动车未来行驶轨迹预测方法、装置及无人驾驶设备。
背景技术:
1、随着无人驾驶技术的逐步落地,自动驾驶汽车已经逐渐出现于现实生活中。其中,无灯控路口的交通场景中,车辆的主观驾驶意愿较强,这对无人驾驶的安全性带来了极大的挑战。无人驾驶汽车需要准确地预判其他车辆的未来行驶轨迹,从而提前做出预判,进而规划出合理、流畅的路径,有效保障行驶过程的安全性,并提升其智能性。因此,有必要对无灯控路口的机动车未来轨迹进行建模,预测其未来行驶轨迹,进而为下游的规划、决策提供额外参考,提升无人车的安全性和流畅性。
2、在现有技术中,对道路中行驶的机动车轨迹进行预测时,往往会获取其速度、位置等特征信息,并结合高精地图中车道线的位置及语义特征,基于规则或者模型的方法进行预测。此外,还可以通过对行驶中的机动车成像,建立鸟瞰图,结合从鸟瞰图中提取到的特征进行相应分析。在上述预测技术中,高精地图作为一种重要信息有效提升了预测的准确性。在无灯控路口驾驶场景下,社会车辆的驾驶行为主要受司机的主观判断为主导,而高精地图通常只能建模较为规范的交通行为,因而如何借鉴路口过去的驾驶行为轨迹,并充分利用高精地图,对正在行驶的机动车的未来行驶轨迹进行推测,是一个急需解决的问题。
3、公开号为cn115320623a,发明名称为《车辆轨迹预测方法、设备、移动装置和存储介质》的专利,公开的方法包括:当车辆进入路口时,基于路口的地图信息确定车辆规范行驶的第一层出口候选点和车辆不规范行驶的第二层出口候选点,预测车辆行驶至第一层出口候选点以及第二层出口候选点的多条预测轨迹;基于预置的代价函数确定多条预测轨迹各自的转弯幅度代价;从多条预测轨迹各自的转弯幅度代价中,优先选择数值最低的转弯幅度代价所对应的预测轨迹作为车辆的轨迹预测结果。容易看出,该发明通过利用车道线生成候选预测轨迹,并根据车辆历史轨迹进行预测轨迹选择,从而确定最后的预测结果。然而,该方法中直观地使用历史轨迹与规范行驶的预测轨迹进行代价计算,不能兼顾车辆行驶的多变性。同时,预测过程中,车辆需处于特定的位置才能进行较准确的判断,智能性有待进一步提升,才能更好地应对无灯控路口下的复杂交通场景。
4、公开号为cn115009275a,发明名称为《面向城市场景下车辆轨迹预测方法、系统及存储介质》的发明,公开的方法包括:搜索预测目标周边一定范围内的车道序列,从车道序列中提取预测目标的候选车道序列得到候选目标点集合;采用向量表示预测目标周边智能体的轨迹序列及车道序列,并提取预测目标的空间交互特征;对空间交互特征和轨迹时序特征进行融合得到场景上下文特征;对候选点目标集合及场景上下文特征进行解码输出预测目标的未来轨迹。该发明结合高精地图使用了车道拓扑结构对车辆行车进行约束,但其使用车道拓扑结构时,以车道线为单位进行特征间的传递,不能很好地利用无灯控路口下复杂的车道线拓扑关系,且未考虑车辆历史轨迹与车道之间的拓扑关系约束,使得最后的预测精度受到限制。
5、综上所述,无灯控路口的机动车未来轨迹预测存在较大挑战,现有方法不能很好地适应其中的复杂性,从而获得较为准确的预测结果。
技术实现思路
1、针对上述现有技术中存在的不足,本发明提供一种适用于在无灯控路口的机动车未来行驶轨迹预测方法、装置及无人驾驶设备,通过对机动车在路口的历史行驶轨迹,结合车道线节点进行约束,可精细建模轨迹预测模型,整体提升预测结果的准确性和稳定性。
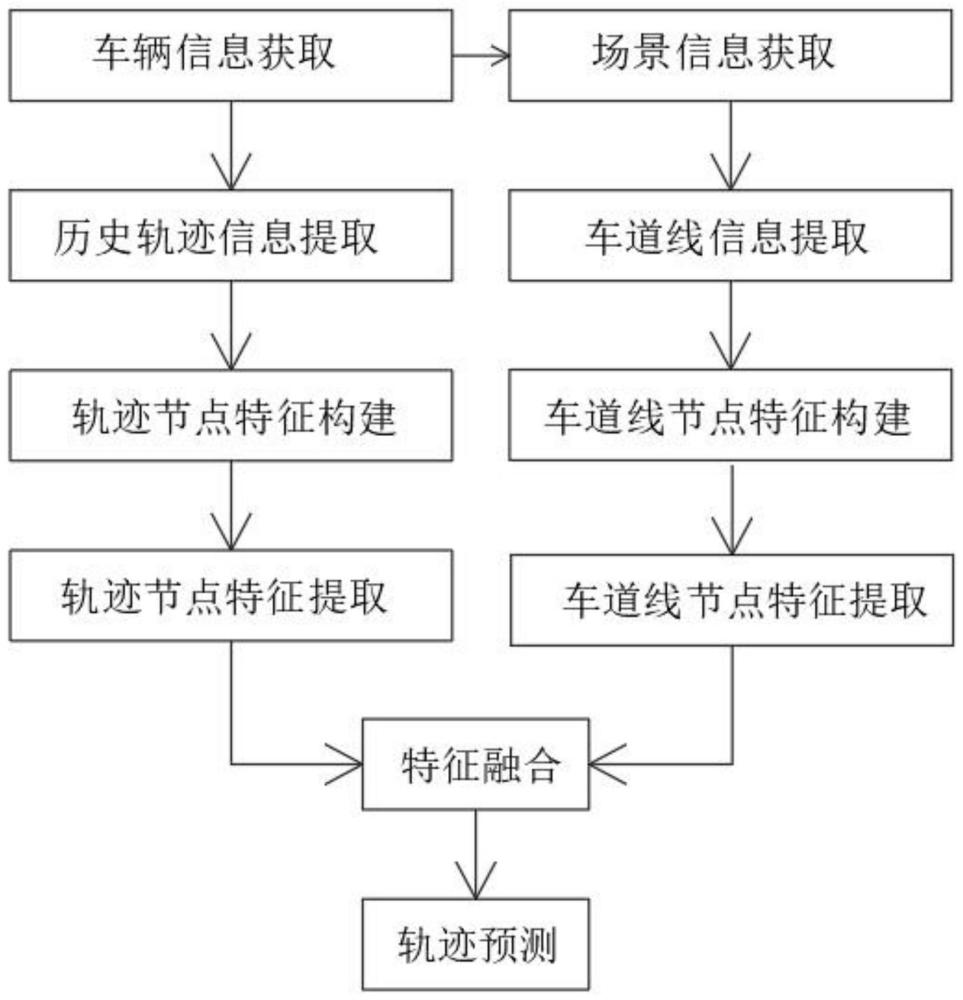
2、第一方面,本技术实施例提供一种机动车未来行驶轨迹预测方法,所述方法包括如下步骤:
3、步骤1,获取目标车辆位置选取范围内的车辆信息和场景信息,其中,所述车辆信息为目标车辆位置选取范围内包括目标车辆在内的每个车辆信息集合体,所述场景信息为目标车辆位置选取范围内的每个车道线信息集合体;
4、步骤2,提取每个车辆信息集合体中的历史轨迹信息,提取每个车道线信息集合体中的车道线信息;
5、步骤3,基于所述历史轨迹信息构建与各车辆信息集合体对应的轨迹节点特征,基于所述车道线信息构建与各车道线信息集合体对应的车道线节点特征;
6、步骤4,对所述轨迹节点特征进行特征提取输出轨迹节点升维特征,对所述车道线节点特征进行特征提取输出车道线节点升维特征;
7、步骤5,将所述车道线节点升维特征传递到与其相连的轨迹节点升维特征进行特征融合,得到融合后的轨迹节点融合特征;
8、步骤6,基于所述轨迹节点融合特征经过神经网络回归,得到目标车辆的未来行驶轨迹预测结果。
9、在其中一个实施例中,步骤1之前,所述方法还包括:
10、采集障碍物的车辆类型及与自车距离,选定需要进行预测的目标车辆;其中,所述目标车辆为将与自车发生交互或在预设距离内的车辆;
11、获取每个所述目标车辆预测时刻前时段t内的轨迹坐标。
12、在其中一个实施例中,所述车辆信息定义为:
13、s={s0,s1,…,si,…,sr}
14、式中,s0为目标车辆的车辆信息集合体,si为第i个车辆的车辆信息集合体,r为目标车辆位置选取范围内除目标车辆外其他车辆的数量;
15、所述车辆信息集合体定义为:
16、si={si1…,sij,…,sit}
17、式中,si1~sit表示第i个车辆预测时刻前时段t内的车辆状态;
18、所述车辆状态定义为:
19、
20、式中,为第i个车辆在第j时刻的世界坐标。
21、在其中一个实施例中,所述场景信息定义为:
22、c={c1,…,ci,…,cm}
23、式中,ci为第i个车道线形成的车道线信息集合体,m为目标车辆位置选取范围内按照id将所取高精地图数据划分后的车道线信息集合体数量;
24、所述车道线信息集合体定义为:
25、ci={ci1,…,cij,…,cin}
26、式中,cij为第i个车道线信息集合体中的第j个坐标点线段,n为车道线信息集合体中坐标点线段的数量;
27、所述坐标点线段定义为:
28、
29、式中,为车道线坐标点的世界坐标。
30、在其中一个实施例中,步骤3中,所述历史轨迹信息包括历史轨迹点坐标,所述基于所述历史轨迹信息构建与各车辆信息集合体对应的轨迹节点特征,包括:
31、对于任一车辆信息集合体,以所述相邻历史轨迹点坐标前一时刻的世界坐标为起点、后一时刻世界坐标为终点,通过相邻时刻历史轨迹点坐标相减形成具有方向信息的第一节点特征表示同时取该相邻历史轨迹坐标的中心作为该第一节点特征的位置信息,由所有第一节点特征共同构成该车辆信息集合体对应的轨迹节点特征s';
32、所述车道线信息包括车道线坐标,基于所述车道线信息构建与各车道线信息集合体对应的车道线节点特征,包括:
33、对于任一车道线信息集合体,以所述相邻车道线坐标前一时刻的世界坐标为起点、后一时刻世界坐标为终点,通过相邻车道线坐标相减形成具有方向信息的第二节点特征表示同时取该相邻车道线坐标中心作为该第二节点特征的位置信息,所有第二节点特征共同构成车道线信息集合体对应的车道线节点特征c'。
34、在其中一个实施例中,步骤4中,所述对所述轨迹节点特征进行特征提取输出轨迹节点升维特征,包括:
35、步骤411,对轨迹节点特征之间进行相互拼接形成三维输入特征;
36、步骤412,将所述三维输入特征输入到神经网络并进行特征提取;
37、步骤413,使用最大值池化法提取得到一个轨迹节点升维特征;
38、所述对所述车道线节点特征进行特征提取输出车道线节点升维特征,包括:
39、步骤421,根据车道线前、后继得到车道线的前后连接关系;
40、步骤422,细化车道线的前后连接关系得到车道线节点间连接关系;
41、步骤423,根据目标车道线节点所属的车道线寻找左、右相邻的车道线,在左右车道线上寻找最近的左右节点,从而得到车道线节点的拓扑关系;
42、步骤424,确定车道线节点间连接关系的加权值和车道线节点的加权拓扑关系;
43、步骤425,车道线节点经多次信息传递得到最后提取出的车道线节点升维特征。
44、在其中一个实施例中,步骤425中,所述车道线节点经多次信息传递得到最后提取出的车道线节点升维特征,包括:
45、对于任一节点i,其车道线节点特征ci'接收与其有连接关系的车道线节点特征cj',并经过神经网络权重加权后进行多次的信息传递,节点i经过信息传递后的特征表示为:
46、
47、式中,αj为拓扑关系中的加权值,ci'与cj'为相邻的车道线节点特征,wi、wj分别为作用于节点i和j的神经网络权重;
48、由此,车道线节点特征按照上述方式进行多次的信息传递,得到最后提取出的车道线节点升维特征c”。
49、第二方面,本技术实施例还提供一种机动车未来行驶轨迹预测装置,所述装置包括:
50、信息获取模块,用于获取目标车辆位置选取范围内的车辆信息和场景信息,其中,所述车辆信息为目标车辆位置选取范围内包括目标车辆在内的每个车辆信息集合体,所述场景信息为目标车辆位置选取范围内的每个车道线信息集合体;
51、信息提取模块,用于提取每个车辆信息集合体中的历史轨迹信息,提取每个所述每个车道线信息集合体中的车道线信息;
52、节点特征构建模块,基于所述历史轨迹信息构建与各车辆信息集合体对应的轨迹节点特征,基于所述车道线信息构建与各车道线信息集合体对应的车道线节点特征;
53、节点特征提取模块,用于对所述轨迹节点特征进行特征提取输出轨迹节点升维特征,对所述车道线节点特征进行特征提取输出车道线节点升维特征;
54、特征融合模块,用于将所述车道线节点升维特征传递到与其相连的轨迹节点升维特征进行特征融合,得到融合后的轨迹节点融合特征;
55、轨迹预测模块,用于基于所述轨迹节点融合特征经过神经网络回归,得到目标车辆的未来行驶轨迹预测结果。
56、第三方面,本技术实施例还提供一种无人驾驶设备,所述无人驾驶设备上设有:
57、存储器,用于存储程序;
58、处理器,用于执行所述存储器存储的所述程序,当所述程序被执行时,所述处理器用于执行如前文所述的机动车未来行驶轨迹预测方法的部分或全部步骤
59、第四方面,本技术实施例还提供一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令;所述计算机执行指令被处理器执行时用于实现如前文所述的机动车未来行驶轨迹预测方法的部分或全部步骤。
60、本发明的有益技术效果在于:
61、本技术提供的机动车未来行驶轨迹预测方法通过将行车场景中的车辆信息和场景信息转化为相近形式的节点表示,并在节点尺度下进行信息挖掘,使车道线节点升维特征有效地传递到车辆历史轨迹节点升维特征中,在节点级的细粒度下完成轨迹预测;此外,通过对机动车在路口的历史行驶轨迹,结合车道线节点进行约束,可精细建模轨迹预测模型,能更好地应对无灯控路口驾驶场景下车辆行驶随意性大,车道线连接关系复杂所带来的机动车未来轨迹预测精度不足的问题,整体提升预测结果的准确性和稳定性,对机动车的未来轨迹预测具有非常实用的使用意义。
62、可以理解的是,第二方面至第四方面提供的机动车未来行驶轨迹预测装置、无人驾驶设备、计算机可读存储介质也同样具有上述的有益效果,在此不再赘述。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250579.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表