车载六自由度平台的稳定优化控制方法和系统与流程
- 国知局
- 2024-08-02 16:25:22
本发明涉及车辆控制的领域,尤其涉及车载六自由度平台的稳定优化控制方法和系统。
背景技术:
1、无人驾驶车辆通过多种不同类型传感器来对车辆所处的驾驶环境进行检测,以此确定驾驶环境中的障碍物存在状态,从而适应性进行驾驶状态调整。现有的无人驾驶车辆通常对行人和其他车辆等障碍物进行识别,对于路面上存在的凸起和凹陷等地形缺陷通常不会视为障碍物,此时无人驾驶车辆会以较慢速度行驶经过地形缺陷,但是这样会使得无人驾驶车辆在行驶过程中产生颠簸震动,无法保证无人驾驶车辆的行驶稳定性,也不能充分利用无人驾驶车辆自身的车载六自由度平台在经过地形缺陷时进行姿态调整,从而无法提高无人驾驶车辆的行驶避震性和可靠性。
技术实现思路
1、本发明的目的在于提供车载六自由度平台的稳定优化控制方法和系统,其采集与分析车辆行驶前方的路面影像,得到前方路面的地形状态信息,以此判断车辆前方路面地形结构是否影响车辆平稳行驶,为后续是否调整车载六自由度平台提供可靠依据;当影响车辆平稳行驶,基于路面地形结构的外形信息,预测车辆行驶经过路面地形结构过程中产生的姿态角度变化信息,以此确定车载六自由度平台的姿态角度调整目标值,使得车载六自由度平台能够提前切换至相应的姿态状态,为车辆行驶经过路面地形结构进行有效的稳定调节;还基于车辆经过路面地形结构过程中的实时震动动作信息,指示车载六自由度平台进行二次姿态角度调整,提高车辆行驶抗震性和稳定性。
2、本发明是通过以下技术方案实现:
3、车载六自由度平台的稳定优化控制方法,包括:
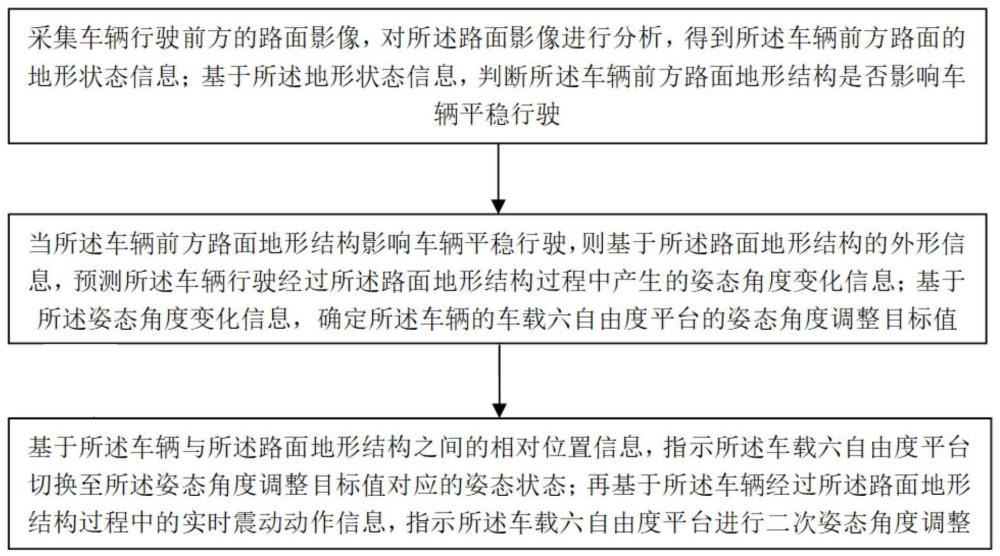
4、采集车辆行驶前方的路面影像,对所述路面影像进行分析,得到所述车辆前方路面的地形状态信息;基于所述地形状态信息,判断所述车辆前方路面地形结构是否影响车辆平稳行驶;
5、当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述路面地形结构的外形信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态角度变化信息;基于所述姿态角度变化信息,确定所述车辆的车载六自由度平台的姿态角度调整目标值;
6、基于所述车辆与所述路面地形结构之间的相对位置信息,指示所述车载六自由度平台切换至所述姿态角度调整目标值对应的姿态状态;再基于所述车辆经过所述路面地形结构过程中的实时震动动作信息,指示所述车载六自由度平台进行二次姿态角度调整。
7、可选地,采集车辆行驶前方的路面影像,对所述路面影像进行分析,得到所述车辆前方路面的地形状态信息;基于所述地形状态信息,判断所述车辆前方路面地形结构是否影响车辆平稳行驶,包括:
8、对车辆行驶前方路面进行双目拍摄,得到所述车辆行驶前方的双目路面影像;基于所述双目路面影像的双目视差,生成相应的三维路面影像;对所述三维路面影像进行画面像素轮廓识别,得到所述三维路面影像的三维轮廓特征信息;基于所述三维轮廓特征信息,确定所述车辆前方路面的障碍地形占地范围;其中所述障碍地形包括凸起障碍地形和/或凹陷障碍地形;
9、将所述障碍地形占地范围与所述车辆的车轮在地面行驶形成的投影范围进行对比,若所述障碍地形占地范围与所述投影范围交叠,则判断所述车辆前方路面地形结构影响车辆平稳行驶;否则,判断所述车辆前方路面地形结构不影响车辆平稳行驶。
10、可选地,当确定所述车辆前方路面的障碍地形占地范围后,根据所述占地范围控制进行双目拍摄的拍摄频率,包括:
11、步骤s1,利用下面公式(1),根据确定出的所述车辆前方路面的障碍地形占地范围,得到所述车辆前方路面的障碍地形变化趋势值,
12、
13、在上述公式(1)中,η表示所述车辆前方路面的障碍地形变化趋势值;s1,s2表示将所述车辆前方路面平均分成两份,一份为近路面一份为远路面,s1为近路面的拍摄面积值,s2为远路面的拍摄面积值;s1(z)表示近路面中障碍地形占地拍摄面积值;s2(z)表示远路面中障碍地形占地拍摄面积值;
14、步骤s2,利用下面公式(2),根据所述障碍地形,得到所述车辆前方路面的障碍颠簸程度值,
15、
16、在上述公式(2)中,μ表示所述车辆前方路面的障碍颠簸程度值;l(a)表示地面第a个障碍地形的凸起拍摄高度值,若地面为凹陷则数值为负值;n表示所述车辆前方路面的障碍地形总个数;mina∈[1,n][l(a)]表示所述车辆前方路面所有障碍地形的凸起拍摄高度值中的最小值;maxa∈[1,n][l(a)]表示所述车辆前方路面所有障碍地形的凸起拍摄高度值中的最大值;||表示求取绝对值;
17、步骤s3,利用下面公式(3),根据所述车辆前方路面的障碍地形变化趋势值以及所述车辆前方路面的障碍颠簸程度值,控制进行双目拍摄的拍摄频率,
18、
19、在上述公式(3)中,f表示进控制行双目拍摄的拍摄频率;f0表示进行双目拍摄的初始预设拍摄频率。
20、可选地,当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述路面地形结构的外形信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态角度变化信息;基于所述姿态角度变化信息,确定所述车辆的车载六自由度平台的姿态角度调整目标值,包括:
21、当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述三维轮廓特征信息,得到所述路面地形结构的峰谷起伏高度变化信息;基于所述峰谷起伏高度变化信息和所述车辆与所述路面地形结构的相对方位信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态倾斜角度信息;其中,所述姿态倾斜角度信息包括所述车辆行驶经过所述路面地形结构过程中发生侧倾对应的姿态倾斜角度值和姿态倾斜角度方向;
22、基于所述姿态倾斜角度信息,确定所述车辆保持水平状态平稳行驶经过所述路面地形结构时所述车辆的车载六自由度平台的姿态角度调整目标值。
23、可选地,基于所述车辆与所述路面地形结构之间的相对位置信息,指示所述车载六自由度平台切换至所述姿态角度调整目标值对应的姿态状态;再基于所述车辆经过所述路面地形结构过程中的实时震动动作信息,指示所述车载六自由度平台进行二次姿态角度调整,包括:
24、基于所述车辆与所述路面地形结构之间的相对距离,估计所述车辆从当前位置行驶至所述路面地形结构所在位置的所需时间;基于所述所需时间,指示所述车载六自由度平台以相应角速度切换至所述姿态角度调整目标值对应的姿态状态;
25、获取所述车辆经过所述路面地形结构过程中的实时震动动作频率信息,基于所述实时震动动作频率信息,指示所述车载六自由度平台以匹配的频率进行二次姿态角度调整。
26、车载六自由度平台的稳定优化控制系统,包括:
27、路面影像采集与分析模块,用于采集车辆行驶前方的路面影像,对所述路面影像进行分析,得到所述车辆前方路面的地形状态信息;
28、车辆平稳行驶识别模块,用于基于所述地形状态信息,判断所述车辆前方路面地形结构是否影响车辆平稳行驶;
29、姿态角度变化预测模块,用于当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述路面地形结构的外形信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态角度变化信息;
30、姿态角度调整目标值确定模块,用于基于所述姿态角度变化信息,确定所述车辆的车载六自由度平台的姿态角度调整目标值;
31、车辆姿态状态切换模块,用于基于所述车辆与所述路面地形结构之间的相对位置信息,指示所述车载六自由度平台切换至所述姿态角度调整目标值对应的姿态状态;
32、车辆姿态角度二次调整模块,用于基于所述车辆经过所述路面地形结构过程中的实时震动动作信息,指示所述车载六自由度平台进行二次姿态角度调整。
33、可选地,所述路面影像采集与分析模块用于采集车辆行驶前方的路面影像,对所述路面影像进行分析,得到所述车辆前方路面的地形状态信息,包括:
34、对车辆行驶前方路面进行双目拍摄,得到所述车辆行驶前方的双目路面影像;基于所述双目路面影像的双目视差,生成相应的三维路面影像;对所述三维路面影像进行画面像素轮廓识别,得到所述三维路面影像的三维轮廓特征信息;基于所述三维轮廓特征信息,确定所述车辆前方路面的障碍地形占地范围;其中所述障碍地形包括凸起障碍地形和/或凹陷障碍地形;
35、所述车辆平稳行驶识别模块用于基于所述地形状态信息,判断所述车辆前方路面地形结构是否影响车辆平稳行驶,包括:
36、将所述障碍地形占地范围与所述车辆的车轮在地面行驶形成的投影范围进行对比,若所述障碍地形占地范围与所述投影范围交叠,则判断所述车辆前方路面地形结构影响车辆平稳行驶;否则,判断所述车辆前方路面地形结构不影响车辆平稳行驶。
37、可选地,所述姿态角度变化预测模块用于当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述路面地形结构的外形信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态角度变化信息,包括:
38、当所述车辆前方路面地形结构影响车辆平稳行驶,则基于所述三维轮廓特征信息,得到所述路面地形结构的峰谷起伏高度变化信息;基于所述峰谷起伏高度变化信息和所述车辆与所述路面地形结构的相对方位信息,预测所述车辆行驶经过所述路面地形结构过程中产生的姿态倾斜角度信息;其中,所述姿态倾斜角度信息包括所述车辆行驶经过所述路面地形结构过程中发生侧倾对应的姿态倾斜角度值和姿态倾斜角度方向;
39、所述姿态角度调整目标值确定模块用于基于所述姿态角度变化信息,确定所述车辆的车载六自由度平台的姿态角度调整目标值,包括:
40、基于所述姿态倾斜角度信息,确定所述车辆保持水平状态平稳行驶经过所述路面地形结构时所述车辆的车载六自由度平台的姿态角度调整目标值。
41、可选地,所述车辆姿态状态切换模块用于基于所述车辆与所述路面地形结构之间的相对位置信息,指示所述车载六自由度平台切换至所述姿态角度调整目标值对应的姿态状态,包括:
42、基于所述车辆与所述路面地形结构之间的相对距离,估计所述车辆从当前位置行驶至所述路面地形结构所在位置的所需时间;基于所述所需时间,指示所述车载六自由度平台以相应角速度切换至所述姿态角度调整目标值对应的姿态状态;
43、所述车辆姿态角度二次调整模块用于基于所述车辆经过所述路面地形结构过程中的实时震动动作信息,指示所述车载六自由度平台进行二次姿态角度调整,包括:
44、获取所述车辆经过所述路面地形结构过程中的实时震动动作频率信息,基于所述实时震动动作频率信息,指示所述车载六自由度平台以匹配的频率进行二次姿态角度调整。
45、与现有技术相比,本发明具有如下有益效果:
46、本技术提供的车载六自由度平台的稳定优化控制方法和系统采集与分析车辆行驶前方的路面影像,得到前方路面的地形状态信息,以此判断车辆前方路面地形结构是否影响车辆平稳行驶,为后续是否调整车载六自由度平台提供可靠依据;当影响车辆平稳行驶,基于路面地形结构的外形信息,预测车辆行驶经过路面地形结构过程中产生的姿态角度变化信息,以此确定车载六自由度平台的姿态角度调整目标值,使得车载六自由度平台能够提前切换至相应的姿态状态,为车辆行驶经过路面地形结构进行有效的稳定调节;还基于车辆经过路面地形结构过程中的实时震动动作信息,指示车载六自由度平台进行二次姿态角度调整,提高车辆行驶抗震性和稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/250630.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表