车辆的泊车方法、装置、电子设备及可读存储介质与流程
- 国知局
- 2024-08-02 16:37:55
本发明涉及泊车,尤其涉及一种车辆的泊车方法、装置、电子设备及可读存储介质。
背景技术:
1、在车辆的使用过程中,为了实现车辆的自动停入车位,需要一种自动泊车方法。超声波和环视相机是自动泊车中常用的传感器,相关技术中,在使用视觉与超声波检测到的车位信息后,再做车位匹配。
2、在实现本技术过程中,发明人发现相关技术中至少存在如下问题:由于采用在使用视觉与超声波检测到的车位信息后,再做车位匹配,使得获取到的车位信息不准确,车辆与车位内的障碍物发生碰撞,进而导致自动泊车失败。
技术实现思路
1、本发明实施例提供一种车辆的泊车方法、装置、电子设备及可读存储介质,以解决相关技术中由于获取到的车位信息不准确,车辆与车位内的障碍物发生碰撞,进而导致自动泊车失败的问题。
2、第一方面,本发明实施例提供一种车辆的泊车方法,所述方法包括:
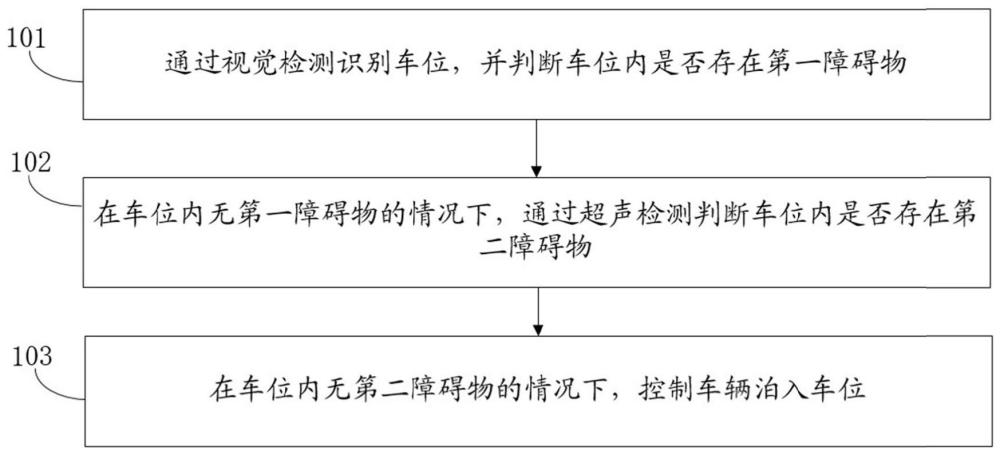
3、通过视觉检测识别车位,并判断所述车位内是否存在第一障碍物;
4、在所述车位内无所述第一障碍物的情况下,通过超声检测判断所述车位内是否存在第二障碍物;
5、在所述车位内无所述第二障碍物的情况下,控制车辆泊入所述车位。
6、可选地,所述通过所述超声检测判断所述车位内是否存在第二障碍物,包括:
7、通过所述超声检测获取所述第二障碍物的第一坐标;
8、通过预设的转换矩阵,将所述第一坐标转换为在第一坐标系下的第二坐标;所述第一坐标系通过所述视觉检测建立;
9、根据车位坐标信息和所述第二坐标,判断所述车位内是否存在第二障碍物;所述车位坐标信息通过所述视觉检测获取。
10、可选地,所述根据所述车位坐标信息和所述第二坐标,判断所述车位内是否存在第二障碍物,包括:
11、根据所述车位坐标信息,确定所述车位的车位坐标范围;
12、在所述第二坐标处于所述车位坐标范围外的情况下,确定所述第二障碍物识别结果为所述车位内无障碍物;
13、在所述第二坐标处于所述车位坐标范围内的情况下,确定所述第二障碍物识别结果为所述车位内存在障碍物。
14、可选地,所述方法还包括:
15、根据所述车位坐标信息和第三坐标,获取所述第一障碍物的识别结果;所述第三坐标通过所述视觉检测建立的第一坐标系获取。
16、可选地,所述方法还包括:
17、在所述第二障碍物识别结果为所述车位内存在障碍物的情况下,将所述车位确定为禁停车位。
18、可选地,所述方法还包括:
19、响应于泊车指令,使用所述视觉检测对所述车辆外部物体进行识别,得到第一坐标组,并使用所述超声检测对所述车辆外部物体进行识别,得到第二坐标组;
20、通过所述转换矩阵,将所述第二坐标组转换为在所述第一坐标系下的第三坐标组;
21、根据所述第一坐标组和所述第三坐标组,构建所述车辆外部的图像并展示。
22、可选地,所述方法还包括:
23、响应于泊车指令,使用所述超声检测获取所述车位的尺寸信息并展示。
24、可选地,所述方法还包括:
25、使用所述视觉检测获取预设的标定物在所述第一坐标系下的第一标定坐标,并使用所述超声检测获取所述标定物在第二坐标系下的第二标定坐标;所述第二坐标系通过所述超声检测建立;
26、根据所述第一标定坐标和所述第二标定坐标,获取从所述第二坐标系转换至所述第一坐标系的转换矩阵。
27、第二方面,本发明实施例提供一种车辆的泊车装置,包括:
28、第一判断模块,用于通过视觉检测识别车位,并判断所述车位内是否存在第一障碍物;
29、第二判断模块,用于在所述车位内无所述第一障碍物的情况下,通过超声检测判断所述车位内是否存在第二障碍物;
30、控制模块,用于在所述车位内无所述第二障碍物的情况下,控制车辆泊入所述车位。
31、可选地,第二判断模块,具体包括:
32、获取子模块,用于通过所述超声检测获取所述第二障碍物的第一坐标;
33、转换子模块,用于通过预设的转换矩阵,将所述第一坐标转换为在第一坐标系下的第二坐标;所述第一坐标系通过所述视觉检测建立;
34、判断子模块,用于根据车位坐标信息和所述第二坐标,判断所述车位内是否存在第二障碍物;所述车位坐标信息通过所述视觉检测获取。
35、可选地,判断子模块,具体包括:
36、第一确定单元,用于根据所述车位坐标信息,确定所述车位的车位坐标范围;
37、第二确定单元,用于在所述第二坐标处于所述车位坐标范围外的情况下,确定所述第二障碍物识别结果为所述车位内无障碍物;
38、第三确定单元,用于在所述第二坐标处于所述车位坐标范围内的情况下,确定所述第二障碍物识别结果为所述车位内存在障碍物。
39、可选地,所述装置还包括:
40、第一获取模块,用于根据所述车位坐标信息和第三坐标,获取所述第一障碍物的识别结果;所述第三坐标通过所述视觉检测建立的第一坐标系获取。
41、可选地,所述装置还包括:
42、确定模块,用于在所述第二障碍物识别结果为所述车位内存在障碍物的情况下,将所述车位确定为禁停车位。
43、可选地,所述装置还包括:
44、第二获取模块,用于响应于泊车指令,使用所述视觉检测对所述车辆外部物体进行识别,得到第一坐标组,并使用所述超声检测对所述车辆外部物体进行识别,得到第二坐标组;
45、转换模块,用于通过所述转换矩阵,将所述第二坐标组转换为在所述第一坐标系下的第三坐标组;
46、构建模块,用于根据所述第一坐标组和所述第三坐标组,构建所述车辆外部的图像并展示。
47、可选地,所述装置还包括:
48、第三获取模块,用于响应于泊车指令,使用所述超声检测获取所述车位的尺寸信息并展示。
49、可选地,所述装置还包括:
50、第四获取模块,用于使用所述视觉检测获取预设的标定物在所述第一坐标系下的第一标定坐标,并使用所述超声检测获取所述标定物在第二坐标系下的第二标定坐标;所述第二坐标系通过所述超声检测建立;
51、第五获取模块,用于根据所述第一标定坐标和所述第二标定坐标,获取从所述第二坐标系转换至所述第一坐标系的转换矩阵。
52、第三方面,本发明实施例提供一种电子设备,包括:处理器、通信接口、存储器和通信总线;其中,处理器、通信接口以及存储器通过通信总线完成相互间的通信;
53、存储器,用于存放计算机程序;
54、处理器,用于执行存储器上所存放的程序时,实现上述第一方面所述的车辆的泊车方法中的步骤。
55、第四方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面所述的车辆的泊车方法中的步骤。
56、综上,本发明实施例中,通过视觉检测识别车位,并判断所述车位内是否存在第一障碍物,然后在所述车位内无所述第一障碍物的情况下,通过超声检测判断所述车位内是否存在第二障碍物,进而在所述车位内无所述第二障碍物的情况下,控制车辆泊入所述车位,提高了获取到的车位信息的准确性,降低了车辆与车位内的障碍物发生碰撞的风险,进而降低了自动泊车失败的可能性,解决了相关技术中由于获取到的车位信息不准确,车辆与车位内的障碍物发生碰撞,进而导致自动泊车失败的问题。
57、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251681.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。