一种多旋翼飞行爬壁清洗机器人的制作方法
- 国知局
- 2024-08-02 16:44:38
本技术涉及飞行机器人,具体涉及一种多旋翼飞行爬壁清洗机器人。
背景技术:
1、随着机器人技术的不断发展,一种新型机器人——多旋翼两用机器人逐渐进入市场,在军事、安防、清洁、监测等多个领域发挥着重要的作用;现有专利cn110920875a,公开了一种多旋翼增压式飞行爬壁机器人,其主体为框架式结构,主体的顶面上设置有顶部旋翼机构,主体的侧面上设置有侧部旋翼机构,主体的内部设置有设备箱,设备箱的顶部上设置有飞行控制器控制顶部旋翼机构、侧部旋翼机构的运转,进而实现爬壁与飞行功能,该方案中使用了八个旋翼为机器人提供浮力和压力,每个旋翼单独由电机供电,这导致该机器人结构复杂且耗能较大,不利于飞行续航,因此,如何简化装置结构延长续航是亟待解决的问题。
技术实现思路
1、本实用新型针对上述机器人结构复杂的问题,提供一种多旋翼飞行爬壁清洗机器人。
2、为了实现上述目的,本实用新型提供了以下技术方案:
3、一种多旋翼飞行爬壁清洗机器人,包括车架及车架上安装的翻转机构、四杆机构、副旋翼机构和主旋翼机构;
4、所述四杆机构形成有铰接的曲柄、连杆、摇杆和固定架,所述曲柄与翻转机构联动并接受翻转机构传递的扭矩,所述摇杆与副旋翼机构固接,所述曲柄转至与连杆平行时四杆机构处于死点位置,所述副旋翼机构处于水平或竖直工作位置;
5、所述主旋翼机构包括翼轮和控制翼轮倾转的转向装置,所述翼轮设有主旋翼和为主旋翼提供动力的主旋翼电机。
6、本实用新型通过四杆机构带动翼轮机构倾转,由于四杆机构具有在曲柄转至与连杆平行时的两个死点位置,该死点位置具有很强的稳定性。因此,通过将四杆机构的死点位置与翼轮机构的工作位置相契合,能有效防止翼轮机构脱位、滑位,且四杆机构结构简单。其中,四杆机构处于死点位置对应的曲柄两个极限位置可通过机械式限位装置实现位置限定,也可通过位置检测开关检测曲柄位置获得位置信号,利用现有成熟的工业控制技术和位置信号实现曲柄转动角度的控制。另一方面,本实用新型通过主旋翼机构控制翼轮倾转为机器人提供吸附力或前进动力,简化了机器人的结构。
7、进一步,所述曲柄一端与传动轴固定连接,曲柄另一端与连杆铰接处形成第一铰接点,连杆与摇杆铰接处形成第二铰接点,摇杆与固定架铰接处形成第三铰接点,所述固定架与车架固定连接。当曲柄随传动轴作圆周转动时,连杆与摇杆摆动并带动翼轮机构倾转。
8、进一步,所述车架包括车底板及固接在车底板上方的车梁、减速电机架、第一支撑架和第二支撑架;所述第一支撑架与固定架固定连接,所述车架前后两端安装有清洁刷。车架为四杆机构的固定架提供稳定支撑,当机器人爬行或飞行时实现清洁功能。
9、进一步,所述翻转机构包括传动轴和为传动轴传动扭矩的减速电机,还包括第一齿轮、第二齿轮、第三齿轮、第一平衡轴、第二平衡轴、第一带轮、第二带轮、第三带轮、第四带轮;所述第一齿轮与减速电机的输出轴固接;第一齿轮与第二齿轮啮合;第二齿轮与第一带轮固接于第一平衡轴,第一带轮与第二带轮带传动配合,第二带轮轴心与传动轴固接;所述第二齿轮与第三齿轮啮合,第三齿轮与第三带轮固接于第二平衡轴,第三带轮与第四带轮带传动配合,第四带轮轴心与传动轴固接。减速电机通过多组传动途径带动传动轴转动。
10、进一步,所述第二齿轮与第三齿轮规格相同;所述第一带轮与第三带轮节圆直径相等,第二带轮和第四带轮节圆直径相等;所述第一带轮、第二带轮的传动比与第三带轮、第四带轮的传动比相等。通过对各传动构件的规格限制,保证两个传动轴转速相同。
11、进一步,所述车架上设有多个通孔;所述传动轴、第一平衡轴、第二平衡轴分别与通孔转动配合。车架为传动结构提供有力支撑。
12、进一步,所述传动轴两端各连接一个曲柄,每一摇杆固接一个副旋翼机构。保证每一个传动轴对应两个副旋翼机构,使车架两侧的副旋翼机构位置对称。
13、进一步,所述副旋翼机构包括驱动电机、副旋翼、车轮和连接架,所述连接架一端与摇杆固接,摇杆另一端与车轮转动连接;所述车轮上固接有驱动电机,所述驱动电机的输出端与旋翼固定连接。驱动电机为旋翼提供动力,保证旋翼旋转使装置实现飞行功能。
14、进一步,所述主旋翼机构还包括与车架固接的u形板,所述转向装置为舵机且舵机安装在u形板内腔,所述舵机的转轴与翼轮固接并带动翼轮倾转。
15、进一步,还包括控制器,所述控制器控制减速电机、驱动电机、舵机、主旋翼电机转动角度或速度。
16、有益效果:(1)本实用新型通过翻转机构控制四杆机构,进而控制四个副旋翼机构发生倾转,当四杆机构处于其中一个死点位置时,车轮保持水平,驱动电机带动副旋翼旋转实现机器人飞行;当四杆机构处于另一死点位置时,车轮为竖直状态,旋翼不转动,可以作为水平运动的普通的小车;本实用新型相比现有翻转机构,当机构处于死点时,不需要额外的外力限制,就能使机构处于稳定的状态;(2)本实用新型的主旋翼机构通过倾转翼轮为机器人提供浮力或压力,相比于现有技术使用众多旋翼,本机器人装置体积减小、结构简单,重量减轻,从而有利于飞行续航。
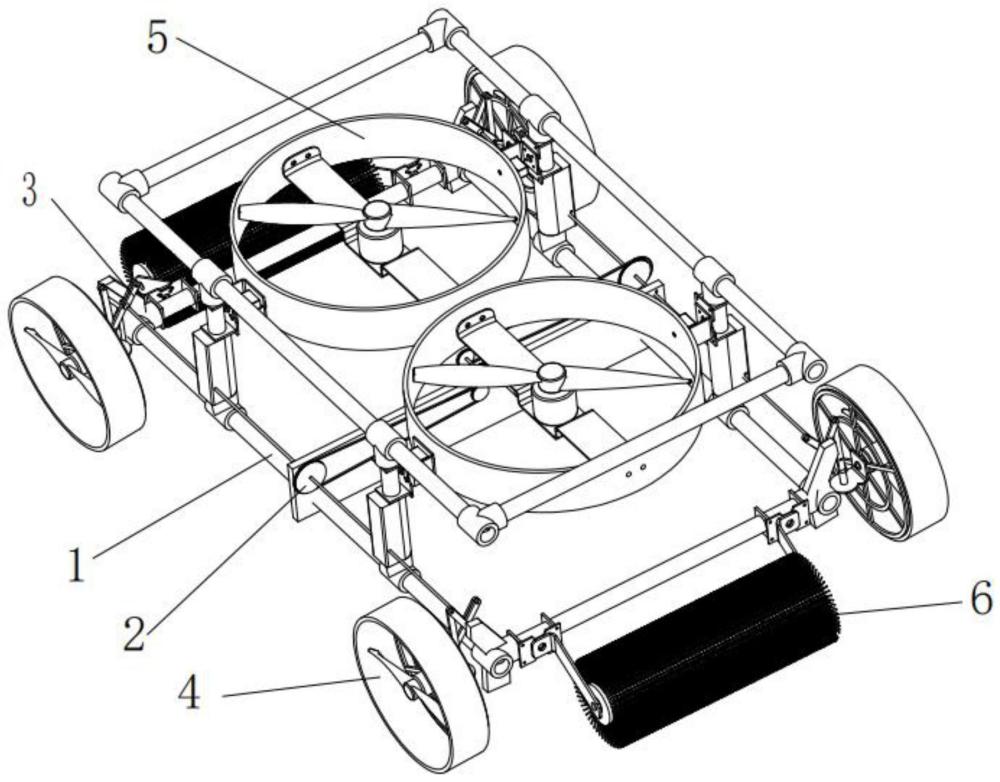
技术特征:1.一种多旋翼飞行爬壁清洗机器人,其特征在于,包括车架(1)及车架(1)上安装的翻转机构(2)、四杆机构(3)、副旋翼机构(4)和主旋翼机构(5);
2.根据权利要求1所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述曲柄(31)一端与传动轴(28)固定连接,曲柄(31)另一端与连杆(32)铰接处形成第一铰接点,连杆(32)与摇杆(33)铰接处形成第二铰接点,摇杆(33)与固定架(30)铰接处形成第三铰接点,所述固定架(30)与车架(1)固定连接;曲柄(31)随传动轴(28)作圆周转动时,连杆(32)与摇杆(33)摆动并带动副旋翼机构(4)倾转。
3.根据权利要求1所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述车架(1)包括车底板(10)及固接在车底板(10)上方的车梁(11)、减速电机(20)架、第一支撑架(12)和第二支撑架(13);所述第一支撑架(12)与固定架(30)固定连接,所述车架(1)前后两端安装有清洁刷(6)。
4.根据权利要求3所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述翻转机构(2)包括传动轴(28)和为传动轴(28)传动扭矩的减速电机(20),还包括第一齿轮(21)、第二齿轮(22)、第三齿轮(23)、第一平衡轴(221)、第二平衡轴(231)、第一带轮(24)、第二带轮(25)、第三带轮(26)、第四带轮(27);所述第一齿轮(21)与减速电机(20)的输出轴固接;第一齿轮(21)与第二齿轮(22)啮合;第二齿轮(22)与第一带轮(24)固接于第一平衡轴(221),第一带轮(24)与第二带轮(25)带传动配合,第二带轮(25)轴心与传动轴(28)固接;所述第二齿轮(22)与第三齿轮(23)啮合,第三齿轮(23)与第三带轮(26)固接于第二平衡轴(231),第三带轮(26)与第四带轮(27)带传动配合,第四带轮(27)轴心与传动轴(28)固接。
5.根据权利要求4所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述第二齿轮(22)与第三齿轮(23)规格相同;所述第一带轮(24)与第三带轮(26)节圆直径相等,第二带轮(25)和第四带轮(27)节圆直径相等;所述第一带轮(24)、第二带轮(25)的传动比与第三带轮(26)、第四带轮(27)的传动比相等。
6.根据权利要求5所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述车架(1)上设有多个通孔;所述传动轴(28)、第一平衡轴(221)、第二平衡轴(231)分别与对应通孔转动配合。
7.根据权利要求6所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述传动轴(28)两端各连接一个曲柄(31),每一摇杆(33)固接一个副旋翼机构(4)。
8.根据权利要求7所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述副旋翼机构(4)包括连接架(40)、车轮(41)、驱动电机(42)和副旋翼(43),所述连接架(40)一端与摇杆(33)固接,连接架(40)另一端与车轮(41)转动连接;所述车轮(41)上固接有驱动电机(42),所述驱动电机(42)的输出端与副旋翼(43)固定连接。
9.根据权利要求3所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,所述主旋翼机构(5)还包括与第二支撑架(13)固接的u形板(50),所述转向装置为舵机(54),且舵机(54)安装在u形板(50)内腔,所述舵机(54)的转轴与翼轮(51)固接并带动翼轮(51)倾转。
10.根据权利要求9所述的一种多旋翼飞行爬壁清洗机器人,其特征在于,还包括控制器,所述控制器控制减速电机(20)、驱动电机(42)、舵机(54)、主旋翼电机(52)转动角度或速度。
技术总结本技术涉及飞行器技术领域,具体涉及一种多旋翼飞行爬壁清洗机器人,包括车架及车架上安装的翻转机构、四杆机构、副旋翼机构和主旋翼机构;四杆机构形成有铰接的曲柄、连杆、摇杆和固定架,曲柄与翻转机构联动并接受翻转机构传递的扭矩,摇杆与副旋翼机构固接,曲柄转至与连杆平行时,四杆机构处于死点位置,副旋翼机构处于水平或竖直位置;主旋翼机构包括翼轮和控制翼轮倾转的转向装置,翼轮设有主旋翼和为主旋翼提供动力的主旋翼电机。本技术通过四杆机构具有很强的稳定性,有效防止翼轮机构脱位、滑位;通过主旋翼机构控制翼轮倾转为机器人提供吸附力或前进动力,简化了机器人的结构。技术研发人员:秦周,付治荣,曾江豪,邹旺受保护的技术使用者:重庆朗正科技有限公司技术研发日:20231220技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240718/252296.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表