一种机具实时自平衡控制方法、系统、设备及介质与流程
- 国知局
- 2024-08-02 16:52:50
所属的技术人员知道,本发明可以实现为系统、方法或计算机程序产品,因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是一一但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram),只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
背景技术:
1、目前国内市面上的机具自平衡方案基本上是在机具上安装一个倾角传感器,将一侧提升杆更换为调平油缸,然后增加控制器和电磁阀,实现开环控制。当机具发生倾斜时,控制器控制电磁阀伸出或缩回,以达到调节机具倾斜角度的目的。目前国内机具调平控制仍处于开环控制状态,无法获取油缸所处位置,同时倾角传感器装在机具上,控制存在滞后性且更换机具后需要重新安装传感器,资源消耗过大。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,具体提供了一种机具实时自平衡控制方法、系统、设备及介质,具体如下:
2、1)第一方面,本发明提供一种机具实时自平衡控制方法,具体技术方案如下:
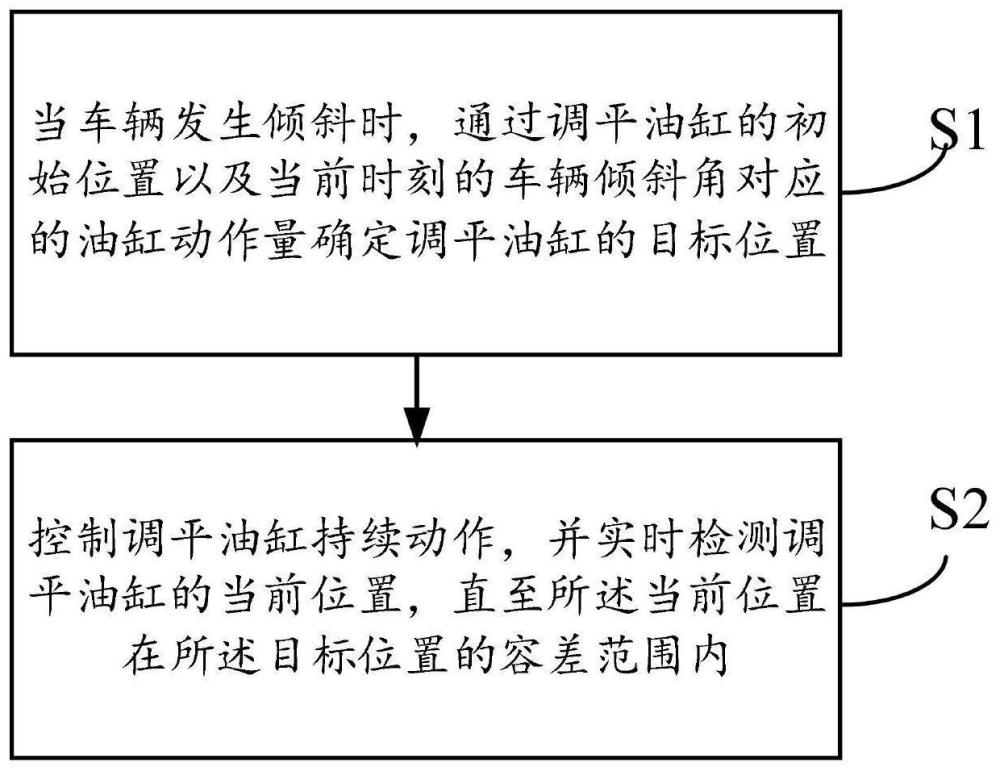
3、当车辆发生倾斜时,通过调平油缸的初始位置以及当前时刻的车辆倾斜角对应的油缸动作量确定调平油缸的目标位置;
4、控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内。
5、本发明提供的一种机具实时自平衡控制方法的有益效果如下:
6、当车辆发生倾斜时,再进行油缸的初始位置的获取以及当前时刻的车辆倾斜角对应的油缸动作量的获取,可以大幅度减少不必要数据的计算量,即可以减少在车辆未发生倾斜时,初始位置以及油缸动作量的确定和存储。此外,结合初始位置确定出来的目标位置更贴合车辆当前的姿态情况,避免了盲目调整带来的调整过度或加重倾斜的问题。由于目标位置的确定,可以使得车辆在调整的过程中始终有参考量,同样避免了盲目调整或调整不到位的问题。在确定了目标位置后,令调平油缸持续动作,并实时进行当前位置与目标位置之间的比较,可以准确的得出是否需要进一步进行调整以及调整量是多少,提高了倾斜调整结果的准确性。
7、在上述方案的基础上,本发明还可以做如下改进。
8、进一步,所述调平油缸的初始位置具体为:将两根提升杆长度一致时对应的调平油缸位置确定为所述初始位置。
9、进一步,当车辆发生倾斜时之前,还包括:
10、通过陀螺仪实时获取车辆的当前车身倾斜角度,并实时进行当前车辆倾斜角度与预设角度的比较判别,当所述当前车辆倾斜角度大于所述预设角度时,判定车辆发生倾斜;当所述当前车辆倾斜角度不大于所述预设角度时,判定车辆未发生倾斜。
11、进一步,控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内的过程具体为:
12、判断当前位置是否在目标位置的容差范围内,并在判断结果为否时,通过电磁阀控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内。
13、2)第二方面,本发明还提供一种机具实时自平衡控制系统,具体技术方案如下:
14、判断模块用于:当车辆发生倾斜时,通过调平油缸的初始位置以及当前时刻的车辆倾斜角对应的油缸动作量确定调平油缸的目标位置;
15、控制模块用于:控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内。
16、在上述方案的基础上,本发明还可以做如下改进。
17、进一步,所述调平油缸的初始位置具体为:将两根提升杆长度一致时对应的调平油缸位置确定为所述初始位置。
18、进一步,还包括:
19、倾斜判断模块,用于通过陀螺仪实时获取车辆的当前车身倾斜角度,并实时进行当前车辆倾斜角度与预设角度的比较判别,当所述当前车辆倾斜角度大于所述预设角度时,判定车辆发生倾斜;当所述当前车辆倾斜角度不大于所述预设角度时,判定车辆未发生倾斜。
20、进一步,控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内的过程具体为:
21、判断当前位置是否在目标位置的容差范围内,并在判断结果为否时,通过电磁阀控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内。
22、3)第三方面,本发明还提供一种电子设备,所述电子设备包括处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述电子设备实现如上任一项方法。
23、4)第四方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现如上任一项方法。
24、需要说明的是,本发明的第二方面至第四方面的技术方案及对应的可能的实现方式所取得的有益效果,可以参见上述对第一方面及其对应的可能的实现方式的技术效果,此处不再赘述。
技术特征:1.一种机具实时自平衡控制方法,其特征在于,包括:
2.根据权利要求1所述的一种机具实时自平衡控制方法,其特征在于,所述调平油缸的初始位置具体为:将两根提升杆长度一致时对应的调平油缸位置确定为所述初始位置。
3.根据权利要求1所述的一种机具实时自平衡控制方法,其特征在于,当车辆发生倾斜时之前,还包括:
4.根据权利要求1所述的一种机具实时自平衡控制方法,其特征在于,控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内的过程具体为:
5.一种机具实时自平衡控制系统,其特征在于,包括:
6.根据权利要求5所述的一种机具实时自平衡控制系统,其特征在于,所述调平油缸的初始位置具体为:将两根提升杆长度一致时对应的调平油缸位置确定为所述初始位置。
7.根据权利要求5所述的一种机具实时自平衡控制系统,其特征在于,还包括:
8.根据权利要求5所述的一种机具实时自平衡控制系统,其特征在于,控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内的过程具体为:
9.一种电子设备,其特征在于,所述电子设备包括处理器,所述处理器与存储器耦合,所述存储器中存储有至少一条计算机程序,所述至少一条计算机程序由所述处理器加载并执行,以使所述电子设备实现如权利要求1至4任一项权利要求所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条计算机程序,所述至少一条计算机程序由处理器加载并执行,以使计算机实现如权利要求1至4任一项权利要求所述的方法。
技术总结本发明公开了一种机具实时自平衡控制方法、系统、设备及介质,涉及农用机械技术领域,方法包括:当车辆发生倾斜时,通过调平油缸的初始位置以及当前时刻的车辆倾斜角对应的油缸动作量确定调平油缸的目标位置;控制调平油缸持续动作,并实时检测调平油缸的当前位置,直至所述当前位置在所述目标位置的容差范围内。本发明调平油缸的目标位置的确定结合了调平油缸的初始位置,以此更贴合车辆当前的姿态情况,避免了盲目调整带来的调整过度或加重倾斜的问题。技术研发人员:孙建平,刘宽,王庆志,田殿君,郭鹏鹏,杨治学,季宇杰,李泉明,刘源,李德芳,高正,王建富,马金运,朱建明受保护的技术使用者:潍柴雷沃智慧农业科技股份有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252895.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表