一种考虑时间与空间距离的车辆运行动态风险评估方法
- 国知局
- 2024-08-02 17:03:51
本发明涉及风险评估、安全驾驶领域,具体涉及一种考虑时间与空间距离的车辆运行动态风险评估方法。
背景技术:
1、准确有效的风险评估方法能够帮助车辆识别道路中的潜在风险,及时采取应对措施,有效降低事故发生的概率。因此,车辆动态风险评估技术对提高道路安全和运行效率具有重要意义。
2、现有的车辆动态风险评估方法主要通过对主车及其他交通参与者进行运动学或动力学建模并引入一定程度的假设以预测车辆的轨迹、覆盖区域等信息计算主车和其他交通参与者碰撞的可能性,常见的风险因素评估及建模方法可分为有碰撞检测和无碰撞检测两大类。有碰撞检测指基于车辆动力学模型,考虑车辆未来轨迹上的接近程度,通过计算某种指标来评估风险,常见指标包括时间指标,加速度指标和距离指标。由于预测及观测的不准确性,许多学者在这些指标基础上提出了基于运动控制参数不确定性的评估方法。如zhang等利用imm融合定转向角速率定加速度模型和行为预测模型来预测周围车辆的轨迹,并基于主车和周围车辆的碰撞可能性和碰撞严重度进行风险评估。基于有碰撞检测的风险评估方法能够实时、快速地计算出车辆风险,但针对单一目标物进行检测,场景适用性不足。无碰撞检测指基于势场论的评估方法,针对交通场景中不同要素特点建立统一风险模型进行风险评估,这类方法可同时考虑多个场景要素进行风险评估,更全面表征智能网联车辆风险。如sattel等假设场景中的元素均会产生场强,这些场强作用于车辆会产生排斥力,排斥力按距离积分之后就会得到势能评价主车风险。yang等将车辆与障碍物之间的相对距离作为场强计算的核心参数。wang等在考虑车路的基础上,进一步考虑了驾驶员驾驶风格来计算场强。基于无碰撞检测的风险评估方法能够描述复杂交通场景中人、车、路等多交通要素对主车风险的综合应影响,但是不考虑其他交通要素与主车之间的相对运动趋势,对驾驶人驾驶过程中感知到的风险描述不够准确。
3、因此,针对现有车辆动态风险评估方法存在的缺陷,本文提出了一种考虑时间与空间距离的车辆运行动态风险评估方法:区别于其他基于无碰撞检测的风险评估方法,该方法将车辆运行过程中受到的风险分为时间距离风险和空间距离风险,分别表征其他交通要素与目标车辆间相对位置与相对运动对驾驶人驾驶过程风险感知的影响,从而更好刻画目标车辆风险水平,使其符合驾驶人对复杂交通环境中潜在风险的规律认知,为车辆安全预警方法与车辆控制提供理论依据,提升道路交通安全。
技术实现思路
1、针对现有车辆动态风险评估方法存在的不足,本文发明旨在准确刻画交通要素与车辆间相对位置和相对运动对车辆行驶动态风险的影响,从而动态评估车辆行驶风险。为实现以上目的,本文提供了一种考虑时间与空间距离的车辆运行动态风险评估方法。该方法的具体实现步骤如下:
2、步骤1,通过毫米波雷达、gps、激光雷达、摄像头等设备获取目标车辆及周围环境信息,包括自车与其他环境要素的位置、速度信息等;
3、步骤2,基于步骤1中采集的数据以目标车辆i为坐标原点,目标车辆速度方向为x轴正方向建立右手平面直角坐标系。空间距离表征相对位置给目标车辆带来的风险,计算其他交通要素j与目标车辆i空间距离风险risk_pij,步骤2的具体实现步骤如下:
4、步骤21,t时刻目标车辆i与其他交通要素j之间的距离为:
5、
6、其中,xi,yi为t时刻目标车辆i的横纵坐标,xj,yj为t时刻其他交通要素j的横纵坐标。当目标车辆处于静止状态时,任意方向与目标车辆处于相同距离的点上其他交通要素对目标车辆产生相同的风险,同时距离越大,风险越大。因此,其他交通要素j对目标车辆i造成的空间距离风险:
7、
8、步骤22,当目标车辆处于运动状态时,目标车辆运动方向前方位置风险大于后方位置风险,且速度越大,风险越大。引入速度修正系数对目标车辆空间距离风险进行修正,因此,定义其他交通要素j与目标车辆i的速度修正系数为:
9、
10、其中,vi为目标车辆i当前时刻速度,vmax为道路限速,θij为目标车辆i与其他交通要素j间连线与x轴正方向间夹角。则其他交通要素j对目标车辆i造成的距离风险修正:
11、
12、步骤23,对其他交通要素j对目标车辆i造成的空间距离风险进行归一化,归一化函数为:
13、
14、则其他交通要素j对目标车辆i造成的空间距离风险为:
15、
16、步骤3,时间距离表征相对运动给目标车辆带来的风险,基于步骤1中采集的数据计算其他交通要素j与目标车辆i时间距离风险risk_vij,步骤3的具体实现步骤如下:
17、步骤31,目标车辆与其他交通要素处于靠近趋势时,风险增大,靠近趋势越大,风险越大;目标车辆与其他交通要素远离时,风险减小,远离趋势越大,风险越大。采取相对速度描述其他交通要素与目标车辆相对运动趋势,因此,其他交通要素j对目标车辆i造成的时间距离风险:
18、
19、其中,t为计算时间步长。
20、步骤32,对其他交通要素j对目标车辆i造成的时间距离风险进行归一化,归一化函数为:
21、
22、则其他交通要素j对目标车辆i造成的时间距离风险为:
23、
24、步骤4,对目标车辆i受到的空间距离风险与时间距离风险进行叠加,得到其他交通要素j对目标车辆i造成的总体风险:
25、riskij=αf(risk_pij)+(1-α)g(risk_vij)
26、其中,α为权重参数,表示空间距离风险与时间距离风险对目标车辆i受到其他交通要素j总体风险的贡献程度,由实际实验数据标定。
27、步骤5,目标车辆在复杂交通场景中,同一时间受到多个交通要素影响其风险水平。对不同交通要素产生的风险取最大值,得到目标车辆所受到的风险:
28、
29、其中,n为t时刻影响目标车辆风险水平的交通要素数量。
技术特征:1.一种考虑时间与空间距离的车辆运行动态风险评估方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,该方法考虑时间与空间距离评估车辆行驶过程中的动态风险,采用空间距离表征相对位置带来的风险,采用时间距离表征相对运动带来的风险,并通过最大值叠加获得目标车辆在复杂交通环境中的风险变化,从而为进一步风险预警与车辆主动控制提供依据,提高交通运行安全性。
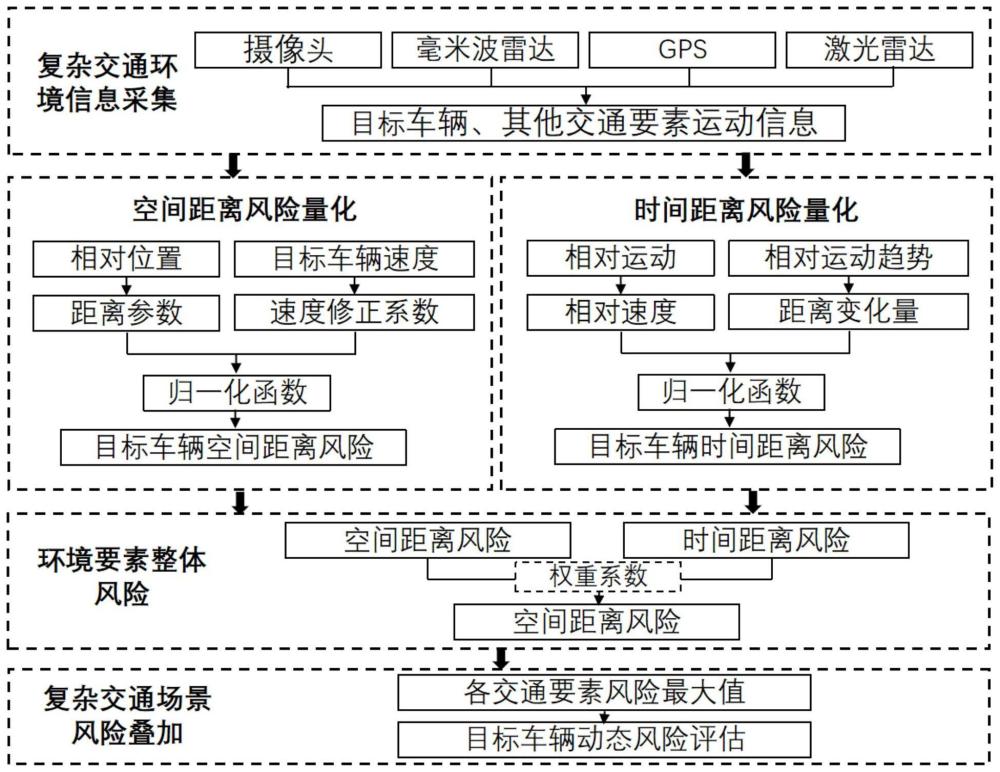
技术总结本发明提出了一种考虑时间与空间距离的车辆运行动态风险评估方法,该方法主要分为三个部分,分别是时间距离风险量化模块、空间距离风险量化模块和风险叠加模块,通过各种设备采集目标车辆周围的环境信息,并基于采集的数据对目标车辆和周围车辆的位置坐标和相对速度进行计算;然后分别计算当前时刻其他环境要素对目标车辆造成的时间距离风险与空间距离风险;依据权重参数对单一环境要素所产生的两种风险求和,并对目标车辆所受到的全部环境要素风险取最大值,得到车辆当前时刻受到的风险值;从而为进一步风险预警与车辆主动控制提供依据,提高交通运行安全。技术研发人员:刘淼淼,李蓬睿,朱明月,汤认京,刘晓晨,林伟群受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240718/253814.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表